Навигация
Тест перевірки окремих вузлів або пристроїв
21974
знака
0
таблиц
5
изображений
3.2 Тест перевірки окремих вузлів або пристроїв
Програма за якою працює мікропроцесор мовою асемблера АТ90S8515 має наступний вигляд:
bigpause equ 100 ; задаемо значення стартової паузи
pause1 egu 15 ; значення паузи перед зміною напрямку руху
pause2 equ 50 ; задаємо час, на протязі якого планетохід буде відїжджати назад
pause2 equ 50 ; задаємо час, на протязі якого планетохід буде розвертатися
portA equ 05h ; адрес порта А
portB equ 06h ; адрес порта В
org 0h ; резервування 100 байт починаючи з адресу 0h
reset:
mov r31, 1Fh ; задаємо направлення роботи портів
out portB, r31 ; PB0, PB1, PB2, PB3, PB4 - виходи, PB5, PB6 - входи
mov r31, 61h ; виводимо в порт В код зупинки двигунів,
out portB, r31 ; і вмикаємо резистори на входах РВ5, РВ6
mov r31, bigpause ; записуэмо в регістр r31 значення великої паузи
call pause ; викликаємо підпрограму паузи
jmp start ; переходимо на мітку старт
start:
mov r31, 00000011b ; установлюємо на виході РВ1 лог. 1,
out portB, r31 ; що зумовлює ввімкнення лівого двигуна
mov r31, 00001011b ; установлюємо на виході РВ3 лог. 1,
out portB, r31 ; що зумовлює ввімкнення правого двигуна
mov r31, 00001010b ; установлюэмо на виходіРВ0 лог. 0,
out portb, r31 ; що і гасить світлодіод
scan:
in r31, portB ; читаємо стан порту В
test r31, 01000000b ; перевіряємо чи натиснута права кнопка
jz left ; якщо натиснута, переходимо на мітку left
test r31, 00100000b ; перевіряємо чи натиснута ліва кнопка
jz right ; якщо натиснута, переходимо на мітку right
jmp scan ; якщо ні одна кнопка не натиснена, повторяємо цикл перевірки стану кнопок
left:
mov r30, 63h ; записуємо в регістр r30 код повороту наліво, який буде виводиться в порт в
call stop ; визиваємо підпрограму stop
jmp start ; повертаємся на мітку start
right:
mov r30, 69h ; записуємо в регістр r30 код повороту направо, який буде виводиться в порт в
call stop ; визиваємо підпрограму stop
jmp start ; повертаємся на мітку start
; --------------------------------------------------------------------------------------------------
; підпрограма stop, задача якої - ввімкнення потрібного маневру (відїзд, повороти направо та наліво)
; --------------------------------------------------------------------------------------------------
stop proc
mov r31, 00001000b ; установлюємо на виході РВ1 лог. 0,
out portB, r31 ; що зумовлює вимкнення лівого двигуна
mov r31, 00000000b ; установлюємо на виході РВ3 лог. 0,
out portB, r31 ; що зумовлює вимкнення правого двигуна
mov r31, pause1 ; записати в регістр r31 значення паузи перед зміною направлення руху
call pause ; викликаємо підпрограму pause
mov r31, 00000100b ; встановлюємо на виході РВ2 лог. 1,
out portB, r31 ; що заставляє лівий двигун крутитися в іншу сторону
mov r31, 00010100b встановлюэмо на виході РВ4 лог. 1,
out portB, r31 ; що заставляє правий двигун крутитися в іншу сторону
mov r31, 00010101b ; встановлюэмо на виході РВ0 лог. 1,
out portB, r31 ; що запалює світлодіод
mov r31, pause2 ; записати врегістр r31 значення часу, на протязі якого планетохід буде відїжджати назад
call pause ; викликаємо підпрограму pause
mov r31, 00010101b ; встановлюємо на виході РВ2 лог. 0,
out portB, r31 ; що вимикає лівий двигун
mov r31, 00010001b встановлюэмо на виході РВ4 лог. 0,
out portB, r31 ; що вимикає правий двигун
mov r31, 00000000b встановлюэмо на виході РВ0 лог. 0,
out portB, r31 ; чим гасим світлодіод
mov r31, pause1 ; записати врегістр r31 значення часу, перед зміною напрямку руху
call pause ; викликаємо підпрограму pause
out portB, r30 ; виводим в порт В код повороту наліво чи направо
mov r31, pause3 ; записати врегістр r31 значення часу, на протязі якого планетохід буде виконувати поворот
call pause ; викликаємо підпрограму pause
out portB, r30 ; записуэмо в порт В код відповідаючий повороту направо чи наліво
mov r31, pause3 ; записати врегістр r31 значення часу, на протязі якого планетохід буде виконувати поворот
call pause ; викликаємо підпрограму pause
mov r31, 61h ; записуэмо в регістр r31 код, відповідний відключенню двигунів
out portB, r31 ; та виводимо його на порт В
mov r31, pause1 ; записати врегістр r31 значення часу, перед зміною напрямку руху
call pause ; викликаємо підпрограму pause
stop endp ; вихід із підпрограми
; ----------------------------------------------------------------
; підпрограма витримки пауз, інтервал яких задається регістром r31
; ----------------------------------------------------------------
pause proc
d3:
mov r29, FFh ; встановлюэмо регістр r29 в FFh
d2:
mov r28, FFh ; встановлюэмо регістр r28 в FFh
d1:
sub r28, 1 ; віднімаємо від регістру r28 оденицю
test r28, 2
jz d1
sub r29, 1 ; віднімаємо від регістру r29 оденицю
test r29, 3
jz d2
sub r31, 1 ; віднімаємо від регістру r31 оденицю
test r31, 4
jz d3
pause endp ; вихід із підпрограми
end ; завершення програми
Алгоритм роботи пристрою, користуючись яким доволі просто розібратися з основними принципами покладеними в основу роботи програми зображено на рисунку 3.2.1.
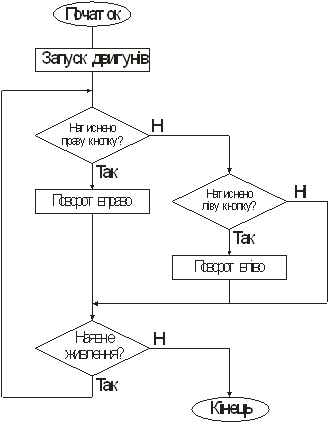
Рисунок 3.2.1 – Алгоритм роботи пристрою
3.3 Розрахунок надійності пристрою
Надійність – властивість пристрою виконувати задані функції в заданих режимах і умовах застосування, обслуговування, ремонту, збереження, транспортування на протязі необхідного інтервалу часу.
Показники надійності:
1. Безвідмовність.
2. Довговічність.
3. Ремонтопридатність.
4. Збереження.
Безвідмовність – властивість безупинно зберігати працездатність до граничного стану, після настання, якого подальша експлуатація виробу економічно недоцільна.
Ремонтопридатність – пристосованість пристрою до попередження відмовлень, до можливості виявлення та усунення несправностей шляхом проведення ремонту і технічного обслуговування.
До термінів ремонтопридатності відносяться: відмовлення, збереження.
Відмовлення – подія, що полягає в повній або частковій утраті працездатності пристрою.
Відмовлення бувають:
Раптові (катастрофічні) – стрибкоподібна зміна параметрів робочого виробу.
Поступові (параметричні) – постійна зміна одного або декількох параметрів з часом, що виходять за припустимі межі.
Збереження – термін, протягом якого при дотриманні режимів збереження виріб зберігає працездатний стан.
Розрахунок надійності поділяється на три розділи:
1. Визначення значення інтенсивності відмовлення всіх елементів за принциповою схемою вузла пристрою.
2. Визначення значення імовірності безвідмовної роботи всієї схеми.
3. Визначення середнього наробітку до першого відмовлення.
4. Виконання розрахунків проходить наступним чином:
5. 1. Інтенсивність відмовлення всіх елементів визначається за формулою:
6. ![]() (3.3.1)
(3.3.1)
7. де:
8. ni– кількість елементів у схемі;
9. li– інтенсивність відмовлень і-го елемента;
10. m – кількість типів елементів.
11. При розрахунку також потрібно враховувати інтенсивність відмовлень через пайки радіоелементів на друкованій платі.
12. Інтенсивність відмовлень елементів розраховуємо за формулою:
13. ![]() (3.3.2)
(3.3.2)
14. де:
15. lо – інтенсивність відмовлень елементів у режимі номінального навантаження;
16. Кe – експлуатаційний коефіцієнт;
17. Кр – коефіцієнт навантаження.
18. Усі ці параметри беруться з довідника з розрахунку надійності.
19. 2. Ймовірністю безвідмовної роботи називається ймовірність того, що за певних умов експлуатації в заданому інтервалі часу не відбудеться жодного відмовлення.
20. Ймовірність безвідмовної роботи визначається за формулою:
21. ![]() (3.3.3)
(3.3.3)
22. де:
23. ![]() - інтенсивність відмов всіх елементів;
- інтенсивність відмов всіх елементів;
24. t – час, (год).
25. За результатами розрахунків складається таблиця і графік.
26. 3. Середній наробіток до першого відмовлення – це час роботи пристрою до першої відмови.
27. Середній наробіток на відмовлення визначається за формулою:
28. ![]() (3.3.4)
(3.3.4)
29. Розрахунок надійності пристрою приведено далі.
Анотація
Завдання курсового проекту: «Розробити схему електричну принципову електричного дзвоника». При виконанні даної роботи, було розроблено електричну та структурну схему проектуємого пристрою, розраховано його надійність, складено програму ініціалізації та тестування пристрою, а також детально вивчено принципи його роботи. Всі матеріали, використані при виконанні поставленого завдання представлені у відповідних розділах даної курсової роботи.
Література
1. Якименко Ю.І. Терещенко Т.О. Сокол Є.І. «Мікропроцесорна техніка» // К.: Кондор – 2004 – 24 с.
2. Методичні вказівки щодо виконання курсової роботи.
3. Аналоговые и цифровые интегральные микросхемы / Под ред. С. В. Якубовского. - М. Радио и связь, 1984.
4. Самофалов К. Г., Викторов О. В., Кузняк А. К. Микропроцессоры/ К. - К.:Техника, 1986
5. Вершинин О.Е. «Применение микропроцессоров для автоматизации технологических процессов» // Л.: Энергоатомиздат, 1986.
6. ЕСКД ГОСТ 2.708-81 "Правила выполнения электрических схем цифровой вычислительной техники".
Похожие работы
... 15. Білецька В. Українські сорочки, їх типи, еволюція і орнаментація//Матеріали доетнографії та антропології. 1929. Т. 21—22. Ч. 1. С. 81. 16. Кравчук Л. Т. Вишивка // Нариси історії українського декоративно-прикладного мистецтва. Львів, 1969. С. 62. 17. Добрянська І. О„ Симоненко І. Ф, Типи та колорит західноукраїнської вишивки//Народна творчість та етнографія. 1959. № 2. С. 80. 18. ...
0 комментариев