Навигация
Согласующее устройство для измерения четырехполюсных радиоэлементов
91544
знака
61
таблица
24
изображения
ВВЕДЕНИЕ
Создание радиоэлектронной аппаратуры - весьма сложный процесс, требующий четкой организации работ на всех этапах, начиная с творческого замысла и кончая изготовлением устройства.
В связи с этим встает вопрос об измерении параметров радиоэлементов. Особый интерес представляют автоматизированные измерения.
В данном дипломном проекте реализован способ измерения по А.С. 1317370. Измерения параметров этим способом позволяет возложить все главные аспекты на современную вычислительную технику. В нашем случае ядром комплекса является широко распространенный персональный компьютер класса IBM-PC.
Алгоритм измерения реализует разработанный пакет программ для IBM-PC на языке высокого уровня Pascal.
1. АНАЛИЗ ТЗ
Из литературных данных [8-9] следует, что выполнение п.п.3.1 ТЗ по существу, представляет развитие методики измерения и технических средств реализованных в процессе разработки в Воронежском Государственном Техническом Университете и изготовления (в НИИПХ г. Москва) тестера Д780. При этом были внедрены А.С.1084709 и 1317370 СССР. А.С.1619209 реализуют алгоритмы по способу А.С.1317370 для четырехполюсных микросхем и может быть реализована в виде съемной измерительной головки.
Использование в качестве ядра комплекса персонального компьютера совместимого с IBM-PC позволяет не только выполнить задачи связанные с измерением и обработкой предварительных результатов, но и решить широкий круг задач в области разработки аналитических макромоделей диодов, всех видов транзисторов и аналоговых микросхем.
Реализация п.п.3.2-3.4 не представляет принципиальных затруднений, но требует существенных затрат материальных и трудовых ресурсов. При этом представляется возможным применить элементную базу общего назначения. Так как стандарт скорости обмена по порту RS-232 составляет 9600 Бод, то использования микроэвм КР1816ВЕ35 позволяет отказаться от специализированных, а следовательно дорогих микросхем последовательного интерфейса.
Таким образом, настоящее ТЗ выполнимо в условиях кафедры МиЭРА.
2. ИЗМЕРИТЕЛЬНЫЕ ЗАДАЧИ
2.1 Состав элементной базы аналоговых РЭС
Элементную базу РЭС, во первых, образуют два обширных класса
элементов: пассивные и активные.
Пассивные радиокомпоненты (ПРК) подразделяются на компоненты общего применения (КОП) и СВЧ компоненты (СВЧК).
В состав ПРК входят:
двухполюсники, в том числе резисторы, конденсаторы, катушки индуктивности, электронные LC фильтры последовательного или параллельного типа, одиночные кварцевые резонаторы;
четырехполюсники: электрические LC фильтры;
акустоэлектронные фильтры на объемныхили ПАВ волнах;
электрические или акустические линии задержки;
пьезоэлектрические трансформаторы и другие устройства, которые имеют одну пару контактов для подключения входного сигнала и другую для подключения нагрузки;
многополюсники: многоотводные электрические и окустоэлектронные линии задержки и фильтры электрических сигналов, многообмоточные узкополосные и широкополостные трансформаторные устройства и т.п.
Состав СВЧК более разнообразен, так как кроме компонентов, выполняющих функции аналогичные функциям ПРК, перечисленным выше, в него входят специфические для СВЧ диапазона двухполюсные и многополюсные компоненты: диоды, волноводные разветвители и ответвители.
Как ПРК так и СВЧК бывают узкополостные и широкополостные,
что накладвает определенную специфику при описании их моделей. С другой стороны, окустоэлектронные устройства, работающие в обычном диапозоне частот (от сотен кГц до десятков МГц) могут быть описанны методами СВЧ диапозона.
Большое разнообразие электронной базы РЭС неизбежно связанно с разнообразием их описаний и методов измерений параметров моделей РЭ.
2.2 Способы представления параметров элементов2.2.1 Двухполюсники
Двухполюсные ПРК могут быть представлены или в виде эквивалентных схем со средоточенными постоянными (рис.1а,б) или в виде параметров "черного ящика" (рис.3,в).
| Модели двухполюсников а) модель резистора без учета индуктивностей выводов; б) модель резистора с учетом индуктивностей выводов; в) модель резистора в виде "черного ящика" Рис.1 |
На повышенных частотах (больше или равно 1 МГц) необходимо учитывать частотную зависимость параметров модели рис.3а,б. Для резисторов, например, коме измерения сопротивления R из-за поверхностного эффекта могут сущестенно проявиться дополнительные потери в выводах или диэлектрическом изоляционном покрытии.Такие измерения учтены в моделях типа рис.3,в. Эти модели с целью анализа физических эффектов, поисхоящих в результате функционирования элемента, можно "просветлить", выразив сущетвенные физические эффекты в виде элементарных элементов. (рис.2).
| Возможные способы представления моделей а,б- при емкостном характере двухполюсника; в,г- при индуктивном Рис.2 |
Для элементов, работающих в ограниченном, вплодь до единственной частоты, диапозоне частот на параметры могут быть выражены единственными значениями L,R,C эквивалентных элементов, представленных схемами рис.4. Аттестация элемента с помощью схем рис.3а,б расширяет частотный диапозон модели. Описание с помощью "черного ящика" (рис.3в) позволяет получить точное значение параметров при заданных частотах. С другой стороны модели типа рис.1 могут быть представленны в виде
, (1)
или
, (2)
Такие же выражения могут быть использованны для полного сопротивления (Z(w)).
3. Методы измерения параметров радиоэлементов 3.1 Классификация методов измерения
Для измерения параметров радиоэлементов используются следующие принципы, учитывающие особенности подключения объекта и сигналов:
разделение напряжения и тока (для двухполюсников);
сравнение двухполюсника с образцовым в мостовых схемах;
определение резонансной частоты или ее изменения;
изменение напряжений и (или) токов на выходе и входе;
разделение падающих и отраженных волн;
выделение падающих и отраженных волн на входе и выходе;
анализ картины стоячей волны;
сравнение двухполюсника с образцовой мерой в схеме с конечными нагрузками;
сравнение многополюсника с образцовыми мерами в схемах с конечными нагрузками.
Структуры измерителей определяют три основные группы.
В состав первой группы входят измерители параметров элементов со сосредоточенными постоянными :
сопротивлений (отношений напряжения к току);
индуктивности и емкости по комплексным сопротивлениям на известной частоте;
двухполюсников в мостовых схемах переменного и постоянного токов;
резонансной частоты (Q-метры).
Вторую группу образуют измерители СВЧ элементов с распределенными параметрами:
приборы, основанные на анализе стоячей волны в измерительной линии с подвижным зондом или набором фиксированных зондов;
приборы, основанные на разделении и измерении комплексных амплитуд сигналов падающих и отраженных волн направленными ответвителями.
Третью группу составляют устройства реализующие способы сравнения многополюсников с активными или комплексными образцовыми мерами путем анализа векторных отношений комплексных напряжений:
устройства с активными образцовыми нагрузками;
устройства с комплексными образцовыми мерами и конечными, в общем случае, комплексными нагрузками.
Устройства третьей группы просты по структуре и могут использоваться для измерения как элементов со сосредоточенными так и с распределенными постоянными. Отсутствие каких-либо подстроечных операций позволяет реализовать комплексную автоматизацию на основе ПК. Это машинно-ориентированные устройства. Это практически универсальные устройства, которые позволяют на одной технологической установке реализовать измерение широкой номенклатуры элементов (пассивные двухполюсники, активные двухполюсники, диоды, стабилитроны, варикапы и т.п.; транзисторы любой структуры, операционные усилители; СВЧ двух и многополюсные устройства).
Большинство приборов всех групп состоит из источника сигнала, схемы подключения образца-измерительной головки (ИГ) и разделения сигналов. При измерении полных характеристик объекта (полное сопротивление или комплексные матрицы) применяется измеритель векторных отношений.
3.2 Методы измерения параметров моделей элементов на основе эквивалентных схем
Измерения производятся на постоянном токе или в рабочем диапазоне частот. Простейшим методом для измерения двухполюсников
является схема омметра (рис.3а).
| Схемы измерения полного сопротивления по измеренным напряжениям и току
Рис.3 |
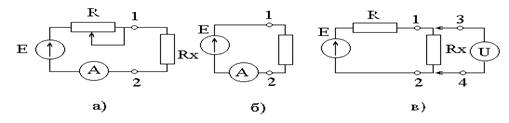
В режиме короткого замыкания контактов 1 и 2 регулировкой резистора R устанавливают максимальное калиброванное значение тока
. (3)
Значения измеряемого сопротивления Rx расчитывают по уменьшению тока
, (4)
где I - уменьшение тока, отсчитываемое от уровня Imax kal.
Шкала амперметра градуируется в омах. Источники напряжения и индикатор могут работать на постоянном и переменном токе.
При использовании источника напряжения (рис.3б) измеряемый ток обратно-пропорционален модулю полного сопротивления объекта. В этом случае представляется возможным определить индуктивность или емкость элемента по формулам
; (5)
, (6)
где w - частота измерения.
Схемы рис.3а,б не позволяет измерять малые сопротивления из-за влияния проводниов, присоединяющих объект к контактам 1,2. Для измерения малых сопротивлений используется схема рис.3в, электропитание которой осуществляется от источника тока. Объект подключается между контактами 1 и 2.Измеряемое напряжение пропорциональо сопротивлению объекта. Проводники соединяющие входные контакты 3 и 4 вольтметра с контактами 1 и 2 не влияют на результаты вследствие высокого внутреннего сопротивления вольтметра.
Погрешности приборов, основанных на измерении токов и напряжений, зависят от нестабильностей источников напряжения или тока и погрешностей амперметров и вольтметров. В совокупности эти погрешности достигают нескольких процентов.Частотный диапазон, как
правило, не превышает 1МГц. Достоинствами методов являются простота измерительных схем и отсутствие калибровочных операций при использовании стабильных источников тока или напряжения.
Недостатки связаны с ограничением частотного диапзона, жесткими требованиями к входным сопротивлениям вольтметров, которые для получения приемлимых результатов должны превышать, как минимум на два порядка модули полных имеряемых сопротивлений,а для амперметров их собственные сопротивления должны быть на два порядка меньше измеряемых.
Схемы на основе резонансных методов работоспособны в диапазоне частот до некольких сотен мегагерц. Как правило, применяется схема, в которой исследуемая индуктивность включается последовательно с источником напряжения в последовательный котур (рис.4.).
При настройке схемы в резонанс калиброванным конденсатором С и достаточно высокой добротности измеряемой катушки (wL>>Rx) добротность определяется по формуле
. (7)
| Схема измерения индуктивности резонансным способом
Рис.4 |
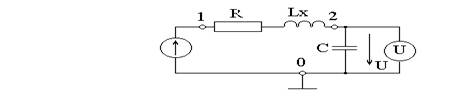
Для расчета индуктивности используют выражение
, (8)
где С- емкость конденсатора; w-частота резонанса.
Шкала вольтметра градуируется в единицах добротноси.
Сопротивление Rx можно определить по формуле
. (9)
Для определения емкости Cx используют стабильную катушку, которую подключают к контактам 1-2 и настраивают схему емкостью С в резонанс. Пусть на резонансной частоте w, емкость равна С1. Затем к контактам 2-0 параллельно емкости С подключают измеряемый конденсатор Cx и снова настраивают схему в резонанс на частоте w,. Если во втором случае емкость образцового конденсатора равна С2, то при Q>>1 искомая емкость определяется по формуле
Cx = C1-C2 . (10)
Для измерения индуктивности и добротности можно использовать схемы с контуром ударного возбуждения, одним из элементов которого служит измеряемая катушка.
Погрешности измерения параметров резонансными методами определяются погрешностями вольтметров, погрешностями градуированных (калиброванных) конденсаторов. Примерные погрешности таких приборов -15%,на высоких частотах увеличиваются до 20%. Погрешности измерителей с контурами ударного возбуждения - 3 5%.
Более точны методы измерения, основанные на сравнении исследуемого объекта с образцовой мерой в мостовой схеме (рис.5.).
| Структурная схема моста для измерения полного сопротивления
Рис.5 |
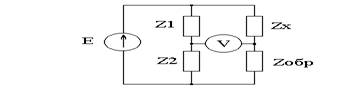
Сигнал источника Е включается в одну из диагоналей моста, в другую включается индикатор нуля напряжения или тока. Нуль индикатора устанавливается при выполнении условия
Zx = Zобр(Z1 / Z2). (11)
Образцовыми мерами обычно являются резисторы и конденсаторы. Набор этих мер позволяет производить отсчет всех параметров элементов при различных их эквивалентных схемах. На рис.6 показаны четыре варианта мостовых схем с резисторами Rа, Rб, Rр и конденсатором Сn, которые используются в качестве образцовых мер. При каждом включении обеспечивается условие баланса путем регулировки образцовых резисторов.
Например, при имерении последовательно включенных сопротивлеий rx и wLx при балансе моста получим
. (12)
При измерении активных сопротивлений на постоянном и переменном токе схемы рис.3.4 используются без конденсатора Cn.
Варианты мостовых схем для измерения параметров различных эквивалентных двухполюсников
| Рис.6 |
Преимуществом схем рис.6 является реализация процесса уравновешивания мостов только путем регулировки резисторов. Недостаток - ограничение частотного диапазона сверху, так как стабильные и чисто активные переменные резисторы трудно реализовать с помощью непроволочных рабочих элементов.
В высокочатотных мостах с частотным диапазоном до сотен МГц применяются автотрансформаторные делители [5].
Погрешности в мостовых приборах могут составлять от десятых до тысячныч долей процента в зависимости от точности образцовых мер.
Ручная балансировка моста, особенно на переменном токе, представляет собой не только трудоемкий, но и сложный процесс.
Этот процесс относительно сложно автоматизировать, так как в измерительных цепях должны применяться цифровые делительные трансформаторы и схемы синхронизации, а так же програмируемые аттенюаторы.
В этой связи определенные достоинства по определению комплексного сопротивления представляют собой схемы с использованием образцовых двухполюсных мер и измерителей векторных отношений. В этом случае мосты с ручной балансировкой полезно использовать для аттестации образцовых мер.
3.3 Измерение многополюсников путем сравнения с образцовыми мерамиРассмотрим условия реализации базового машинно-ориентированного способа измерения линейных параметров многополюсника.
Согласно этому способу, сущность которого приведена в работах [1,2], для определения Y-матрицы многополюсника необходимо выполнить измерение матрицы Uo напряжений холостого хода согласно схемы рис.7а, на которой изображены: источник синусоидального напряжения Ei, многополюсник эквивалентный паразитным параметрам измерительной цепи с матрицей проводимости Yo. Источник Ei подключен к i-му входу-полюсу через комплексное сопротивление Zi, а остальные полюсы-входы нагружены на комплексные сопротивления Zj (j=1).
Индексами i и j обозначены точки подключения измерительного прибора, а именно пробник измерительного канала векторного вольтметра.
Согласно рис.7а при отсутствии измеряемого многополюсника (ИМП) и поочередном подключении последовательно к каждому резистору Zi источника Ei измеряют диагональные Uii и недиагональные
Uoji компоненты матрицы Uo. Затем при поочередном подключении образцовой Yoi меры последовательно к каждому источнику Ei с внутренним сопротивлением Zi (рис.7б) измеряют напряжение Uoi - элемент вектора калибровочных напряжений Uk. Операции измерений
матрицы Uo и вектора Uk опорных и калибровочных напряжений осуществляется n`+n раз, где n- число активных входов многополюсника по переменному току. На этом процесс калибровки измерительной схемы завершается. В результате определяется информация достаточная для учета влияния паразитных параметров эквивалентного многоплюсника Yo.
Рабочий цикл измерения производится согласно рис.3в. В этом случае параллельно схеме рис.7а подключают измеряемый многополюсник с матрицей проводимости Yo. В результате измерительные цепи оказываются нагруженными эквивалентным многополюсником с матрицей проводимости Yo, которую можно расчитать по формуле
Yo = Y + Yo . (13)
Затем производится измерение элементов Uji матрицы U нагруженного режима таким же способом, как и измерение элементов матрицы Uo опорных напряжений. Переключение источника Ei производится n раз и определяются n` напряжений.
| Измерение параметров многополюсника а- измерение элементов матрицы Uo опорных напряжений; б- измерение элементов вектора Uk калибровочных напряжений; в- измерение элементов матрицы и нагруженного режима Рис.7 |
Элементы матрицы Uo, U и вектора Uk используются для расчета матриц передачи Ко холостого хода и К нагруженного режима.
Элемент матрицы Ко рассчитывают по формуле
, (14)
а элемент матрицы К- по формуле
, (15)
где Yп- полная проводимость входной цепи пробника измерительного канала векторного вольтметра.
В работе [2] показано, что Y- матрица измеряемого многополюсника может быть определена в результате решения матричного уравнения
Y = 2(K - Ko ) , (16)
где -1 - знак обращения матриц К и Ко.
3.4 Методика измерения двух- и четырехполюсных радиоэлементовДля случая двухполюсника
n = 1 (17)
имеем
i = 1; j = 0. (18)
Очевидно, что при условиях (17) - (18) имеем:
1) коэффициенты матриц Ко и К с индексами j не имеют смысла;
2) всего аттестуются один коэффициент по формуле (14) и один коэффициент по формуле (15);
3) индекс i не имеет смысла, так как n = 1, матричное уравнение (16) превращается в простое алгебраическое;
4) для определения полной проводимости Y двухполюсника достаточно выполнить согласно рис.8 измерение трех напряжений: Uo холостого хода (рис.8а), Uk калибровки (рис.8б) и U нагруженного режима (рис.8в).
С учетом (16) - (17) и отмеченных замечаний из формул (14) - (15) приходим к формулам
, (17)
Измерение двухполюсника
|
а - измерение напряжения Uo холостого хода; б - измерение напряжения Uk калибровки при нагрузке схемы образцовой мерой Yk; в - измерение напряжения U при нагрузке схемы измеряемым двухполюсником Y Рис.8 |
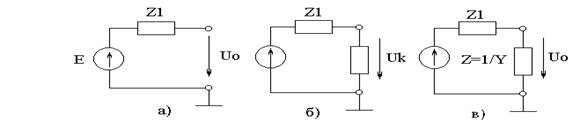
, (19)
Подставляя коэффициенты Ко и К в уравнение (16) с учетом замечания (15) получаем формулу для расчета аттестуемой проводимости Y.
, (20)
Таким образом, для определения полной проводимости (сопротивления) двухполюсника достаточно выполнить измерения трех напряжений согласно схемам (рис.8). При этом справедливы следующие условия:
1) измерительный процесс легко автоматизировать, так как при его
реализации не требуется производить подстроечные операции;
2) из трех тестов два (при регистрации напряжений Uo и Uk) являются калибровочными и при массовых измерениях на фиксированной частоте производятся только один раз;
3) при выполнении предыдущего условия процесс измерения сводится к регистрации одного напряжения U с последующим расчетом по формуле (20);
4) при диапазонных измерениях операции по калибровке можно свести к определению четырех вещественных функций, которые определяют модуль напряжения Uo
Uo = Uo(); (21)
аргумент напряжения Uo
модуль напряжения Uk
Uk = Uk(); (23)
и аргумент напряжения Uk
При использовании стабильной измерительной аппаратуры операции по определению функций (21) - (23) можно выполнить один раз, так функции (19) - (20) определяются в режиме холостого хода или при перестановке нагрузки и их зависимость от частоты не будет сложной. В большинстве случаев эти функции можно выразить через уравнения первого или второго порядка. Для их идентификации необходимо выполнить измерения в двух - трех точках заданного частотного диапазона.
Процесс определения АЧХ и ФЧХ двухполюсника может быть сведен к измерению модуля и фазы напряжения U согласно схеме рис.8в; определения по АЧХ и ФЧХ напряжений Uo и Uk на измеряемой частоте; определение модуля и аргумента проводимости Y на частоте измерения; выполнение аналогичных измерений на всех дискретных точках частотного диапазона, определенных планом эксперимента; вычисление АЧХ и ФЧХ проводимости Y двухполюсника; обработка АЧХ и ФЧХ для определения интересующих пользователя параметров, наблюдения на экране дисплея графиков и т.п.
4. Средства измерения
4.1 Структурная схема измерительного стенда
Структурная схема измерительного стенда для измерения параметров способом сравнения с образцовыми мерами приведена на рис.4.1.
Ядром стенда служит тестер параметров радиоэлементов (ТПР). Автоматизированный режим измерения поддерживается программно с помощью персонального компьютера (ПК). Остальные блоки имеют следующее назначение:
регулятор температурного режима (РТР) для поддержания требуемой по условиям эсперимента температуры измеряемого образца;
программируемый генератор стандартных сигналов (ПГСС) для
измерения в заданном диапозоне частот;
программируемый источник питания (ПИП) для электропитания
измеряемых образцов по постоянному току при высоких уровнях потребляемой мощности;
векторный вольтметр (ВВ) для регистрации сигналов переменного тока;
пакет управления и обработки базы данных РЭ.
| Структурная схема измерительного стенда Рис.9 |
Контрольно измерительное устройство (КИУ) служит для управления и контроля режимами исследуемого РЭ по постоянному и переменному току. КИУ содержит измерительную головку (ИГ) для подключения исследуемого образца и электропитание его по постоянному и переменному току; и коммутатором сигналов статических и динамических измерительных цепей.
Управление КИУ, ПГСС, ПИП и РТР осуществляется ПК через ТПР. ТПР содержит интерфейс на основе МПУ, регистры для управления цифровыми устройствами в составе стенда и АЦП для измерения и контроля режимов измеряемого РЭ.
4.2 Электрическая схема
4.2.1 Общая электрическая схема стенда
Общая электрическая схема комплекса приведена на КД2.791.001ЭЗ (прил.).
Состав устройств на КД2.791.001ЭЗ и их назначение соответствует рис.9.
4.2.2 Общая схема ТПРОбщая схема ТПР приведена на КД2.720.001ЭЗ.
ТПР содержит устройство А1 (стандартный блок питания БПС6-1) и устройство А2 (блок управления КД3.097.002).
Электропитание осуществляется от сети 200В 50Гц через вилку разъема Х1.
4.2.3 Блок управленияЭлектрическая схема блока управления (БУ) приведена на КД3.097.002ЭЗ.
БУ содержит устройство А1 - ЦАП (КД5.192.007) для управления генератором тока (устройство А5 КД5.192.009); устройство А2 - ЦАП (КД5.192.007) для регулировки коллекторного напряжения при измерении транзисторов; устройство А3 - ЦАП (КД5.192.007) для управления устройством РТР (рис.9); устройство А4 - источник электропитания цепей гальванической развязки ПК с ТПР (КД5.192.008).
Управление устройствами А1- А3 осуществляется МПУ через регистры. Состав регистров, их элементов и управляемых устройств приведено в табл.1.
Таблица 1.
Соответствие регистров устройствам А1 - А3
| Номер регистра | Состав элементов | Управляемое устройство |
| 1 | DD7, DD8 | A1 |
| 2 | DD9, DD10 | A2 |
| 3 | DD13, DD14 | A3 |
Функционирование БУ поддерживает МПУ на основе микроЭВМ К1816ВЕ35 (DD1), адресного регистра К1533ИР22 (DD2) и ПЗУ К573РФ2 (DD3). Тактовая частота МПУ (6 МГц) стабилизирована кварцем ZQ1.
Функциональное назначение остальных элементов схемы отражено в табл.2.
Таблица 2.
Функциональное назначение элементов БУ
| Наименование элементов | Функциональное назначение | Объект управления |
| DD4,DD5,DD6 | дешифратор адреса | регистры на элементах DD7 - DD16 |
| DD11, DD12 | регистр | ПГСС |
| DD15 | регистр | КИУ - статика |
| DD16 | регистр | КИУ - динамика |
| DA1, DA2 | источник опорных напряжений | устройства А1, А2, А3 |
| U1, U2 | гальваническая развязка | ПК - БУ |
| VT3, VT4 | внешний усилитель мощности стабильного напряжения | устройство А5 |
| С4 - С20 | блокировочные конденсаторы | DD1 - DD16 |
Транзисторы VT4 - VT20 служат для согласования ТТЛ логики с реле, расположенных в КИУ .
Резисторы R15 - R20 служат для регулировки опорных напряжений, которые поступают на устройства А1 - А3. Назначение остальных резисторов понятно из схемы БУ.
Стабилитроны VD1 - VD4 служат для стабилизации режимов, причем VD1 и VD2 выбраны с учетом высокой температурной стабильности.
Разъем XS1 служит для связи с ПК, а через разъем XP1 проводится электропитание БУ от источника БПС6 - 1.
Разъем ХР2 служит для подключения ПГСС и источника Б5-50, а разъем ХР3 - устройства КИУ.
Процесс взаимодействия ПК и МПУ подразделяется на две законченные стадии: передача и прием данных.
При передаче данных с ПК на МПУ происходит следующее. Передаваемые данные в последовательном виде через оптотранзистор гальванической развязки U1 поступают на вход INT микроэвм DD1. Последняя, распознавая сигнал стартового импульса, обрабатывает принимаемые данные посредством виртуального драйвера поддержки протокола V.24 (описанного в п.п.7.3). Данные переведенные в параллельную форму, в соответствии с командой, записываются в выбранный, посредством микросхемы DD4, регистр (DD7-DD14).
При считывании данных с АЦП DA1 микроэвм инициирует управляющие сигналы и после завершения цикла счета DA1 передает данные на обработку виртуальному драйверу. После обработки данных с DA1 они в последовательном виде через оптотранзистор U2 гальванической развязки передается на ПК.
Электрическая схема устройств А1 - А3 приведена на КД5.192.007Э3. ЦАП сконструирован на базе микросхемы К572ПА1. Микросхемы DD1 - DD2 (повторители с открытым коллектором) служат для защиты цифровых входов от перегрузок, а также для согласования ТТЛ уровней с входными уровнями микросхем серии К572. Микросхема DD3 служит для управления реле К1 и К2, коммутирующих опорное напряжение. Микросхема DA2 (прецизионный операционный усилитель) служит для преобразования выходного тока DA1 в напряжение. Диоды VD1 и VD2 предназначены для защиты выхода DA1 от случайных наводок. Смещение входов 4 - 13 микросхемы DA1 производится напряжением +5В через резисторы R1 - R10, которое вырабатывается на эмиттере транзистора VT1, который работает в схеме делителя +15В поступающего на его коллектор. Конденсаторы С1 - С10 являются блокировочными. Соединение устройства с базовой схемой БУ осуществляется через контакты 1 - 27.
Электрическая схема устройства А4 (источника питания) приведена на КД5.192.008Э3. Оно выполнено на основе генератора Ройера. Генератор выполнен на элементах VT1 и VT2, R1 и R2, и трансформаторе Т2. Элементы С1, С2 и Т1 используется для фильтрации помехи с частотой преобразования. Элементы VD1, VD2, C3 - C6 образуют выпрямитель напряжения, а R3, R4, VD5, VD6 - параметрический стабилизатор.
Устройство А5, электрическая схема которого приведена на КД5.195.009Э3, представляет собой преобразователь напряжение - ток. И содержит 3 генератора тока, первый из которых собран на DA1, VT1, VT2 служит для привязки к напряжению питания, второй на DA2, VT3 формирует положительный выходной ток, а третий на DA3, VT4 - отрицательный. Расчет элементов устройства приведен в п.п.5.1.
4.2.4 Контрольно - измерительное устройствоОбщая схема КИУ приведена на КД3.097.001Э3. КИУ содержит 4 устройства:
измерительную головку (ИГ) - устройство А1;
дифференциальный измерительный усилитель (ДИУ) - устройство А2;
плату управления (ПУ) - устройство А3;
устройство управления и контроля режимов (УУКР) - А4;
гнезда коаксиальных разъемов Х1 - Х4 служат для подключения аналоговых выходов двух ВВ;
гнездо коаксиального разъема Х5 - для подключения выхода ПГСС;
переменный резистор R1 используется для подстройки режима источника тока, который расположен в устройстве А4, причем подключение осуществляется через переключатель устройства А3.
Устройство А4 является базовым. В нем расположены цепи контроля статического режима измеряемого РЭ, схемы автоматизированного управления рабочей точкой транзистора, в том числе программируемый источник тока для управления током коллектора (стока) при измерении транзисторов в режиме микротоков и коммутатор сигналов. Сигналы режимов по постоянному току вырабатываются непосредственно в УУКР, а аналоговые сигналы динамических режимов поступают с разъемов Х1-Х4. Сигналы управления режимом измеряемого РЭ по постоянному току поступают с контактов 3 - 5 на ИГ. Измерительные сигналы с выхода коммутатора , через контакты 7 - 12 устройства А4 поступают на ДИУ, с выхода которого (контакты 8 - 12) и контакты 15 - 20 устройства А4 подключаются к входу АЦП, расположенному в ТПР. Выбор режима измерения (транзистор - интегральная схема, структура NPN - структура PNP, внутренний - внешний источник тока) производится переключателями, расположенными в устройстве А3, которое через контакты 23 - 27 подключено к устройству А4. Сигнал с выхода ПГСС через разъем Х5 поступает на высокочастотный вход ИГ.
Общая схема устройства А1 приведенна на КД4.097.001. В состав ИГ входит:
устройство А1 - панель подключения РЭ (на схеме приведен вариант ПП для измерения биполярных транзисторов);
устройство А2 - согласующее устройство (СУ);
устройство А3 - тестовый аттенюатор.
Подключение к схеме КИО происходит через контакты 1 - 10. Электропитание транзистора по постоянному и переменному току осуществляется через контакты 1 и 2 устройства А1, контакты 4 и 5 используются для управления реле, которое коммутирует измеряемые сигналы переменного тока. Сигналы управления режимом транзистора поступают с контактов 6 и 7 ИГ на контакты 5 и 8 устройства А2. ВЧ сигнал с контакта 8 ИГ поступает на контакт 4 устройства А3. С выходов 1 или 2 устройства А3 ВЧ сигнал поступает на входы 1 или 2 устройства А1. Через контакты 1 - 5 ИГ осуществляется управление коммутатором устройства А3 и реле расположенном в устройстве А1.
Электрическая схема устройства А1 - ИГ приведена на КД5.192.003Э3. Устройство содержит контакты Х1, Х2, Х3 для подключения транзистора, разъем Х4 для подключения измерительного входа ВВ и реле К1 с контактами К1.11 - К1.13 для подключения ВВ к коллектору или базе транзистора. Подключение устройства к ИГ происходит через контакты 1- 5.
Электрическая схема СУ (устройство А2 ИГ) приведена на КД5.192.002Э3. Резисторы R1 и R4 служат для электропитания коллектора и базы по постоянному току. Сигналы переменного тока снимаются с контактов 6 и 7 и через согласующие эмитерные повторители, собранные на транзисторах VT1 и VT2, и резисторы R1 и R3 поступают для электропитания базы или коллектора по переменному току. Стабилитроны VD1 и VD2 для стабилизации режимов эмитерных повторителей. Конденсаторы С1 - С8 служат для развязки цепей по переменному и постоянному току или блокировки по переменному току. Пары резисторов R1,R2 и R3,R4 служат нагрузочными резисторами в цепи коллектора и базы.
Электрическая схема ТА (устройство А3 ИГ) приведена на КД5.192.001Э3. ТА служит для регулировки уровня сигнала при измерении транзисторов или микросхем. Собственно ТА содержит 3 ступени деления по 20 дБ каждая, включенные последовательно. Идентичные делители на резисторах R3 - R5, R6 - R8 и R9 - R11 собранные по «П»-образной схеме и позволяют регулировать сигнал без изменения выходного и входного сопротивления, которое при любых коммутациях остается равным 50 Ом. Управление делителем осуществляется реле К2 - К4. Реле К1 служит для подключения ТА к цепи коллектора (нормальное положение) или к цепи базы. Резисторы R1 и R2 служат для согласования входных цепей. ВЧ сигнал поступает через контакт 4, а выходные снимаются с контактов 1 или 2, контакты 5 - 8 используются для управления реле.
Устройство А2 КИУ (дифференциальный измерительный усилитель) представлено на КД5.192.005Э3. ДИУ содержит 3 прецизионных операционных усилителей DA1 - DA3. На DA1, DA2 собран усилитель с коэффициентом усиления дифференциального сигнала 2,5 а синфазного сигнала - 1. На DA3 собран усилитель, коэффициент усиления дифференциального сигнала - 1, а синфазного - 0. Благодаря такому решению ослабление синфазного сигнала 100 дБ. Коэффициент усиления дифференциального сигнала задается резисторами R3,R5,R6 и R8, причем R5 служит для точной подстройки коэффициента усиления. Резистор R4 предназначен для балансировки усилителя (установка 0). Резистор R13 служит для оптимизации коэффициента ослабления синфазного сигнала, а элементы С1 - С4, R14, R15 представляют собой фильтр питания.
Принципиальная схема устройства А3 КИУ приведена на КД5.192.004Э3. Она содержит переключатели: S1 - для электропитания транзистора (PNP или NPN структура); S2 - для подключения внешнего или внутреннего источника тока; S3 - для выбора измеряемого элемента (транзистор - микросхема). Светодиоды HL1- HL2 для индикации положения переключателей. Соединения устройств А3 с А4 КИУ производится с помощью контактов 1 -17.
Устройство А4 КИУ представлено на КД5.192.006Э3 (УУКР). Оно содержит программируемый синтезатор коллекторного напряжения на микросхеме DA1 и DA2, транзисторах VT1 и VT2 и стабилитронах VD1 и VD2. Который реализует устройство регулировки коллекторного напряжения транзистора по АС№ 1084709 СССР. Управление рабочей точкой по напряжению Uк осуществляется от ЦАП. Сигнал управления поступает через контакты 24а, 25а разъема Х1 на резистор R1 (см. схему КД3.097.001). Сигнал с движка резистора R1 поступает на инвертирующий вход микросхемы DA1. На неинвертирующий вход этой микросхемы поступает сигнал обратной связи с выхода делителя R1 - R2, который подключен к коллекторной цепи измеряемого транзистора через контакт 8. Схема на ОУ DA2 представляет собой прецизионный источник тока, управляемый напряжением. Этот источник включается вместо внешнего источника тока, расположенного в БУ ТПР, при микромощных токовых режимах. При этом для программного управления используется мощный источник тока, сигнал от которого поступает через контакты 28а и 29а.
Коммутатор на реле К1 - К9 служит для переключения измерительных цепей в процессе измерения.
Таблица 3
Таблица состояний реле
| Измеряемый параметр | Состояние реле | |||||
| К1, К2 | К3 | К4,К5 | К6 | К7 | К8,К9 | |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Модуль напряжения первого ВВ | 0 | 1 | - | 0 | 0 | 0 |
| Аргумент напряжения первого ВВ | 0 | 0 | - | 0 | 0 | 0 |
| Модуль напряжения второго ВВ | 1 | 1 | - | 0 | 0 | 0 |
| Аргумент напряжения второго ВВ | 1 | 0 | - | 0 | 0 | 0 |
| Ток коллектора Iк | - | - | 1 | 1 | 1 | 0 |
| Напряжение коллектора Uк | - | - | 1 | 1 | 0 | 0 |
| Ток базы Iб | - | - | 0 | 1 | 1 | 0 |
| Напряжение базы Uб | - | - | 0 | 1 | 0 | 0 |
| Напряжение питания микросхемы | - | - | - | - | - | 1 |
Примечания:
1. УУКР в перспективе рассчитан на измерение с применением двух ВВ (для этого введены реле К3 и К2).
2. резистор R1 - эталонная мера в цепи питания коллектора, определение которого производится по формуле
Iк = UR3 / R3, (25)
где UR3 - падение напряжения, регистрированное на R3.
Похожие работы
... плана ФЭ. Большое разнообразие моделей РК приводит к необходимости использования разнообразных способов и технических средств для измерения их параметров. Как правило, статические и динамические параметры РК измеряют на разных технологических установках. Методы построения средств измерения для идентификации моделей РК могут быть сведены к следующим принципам, учитывающим особенности подключения ...
0 комментариев