Навигация
Микроэлектронные формирователи и преобразователи
35345
знаков
1
таблица
13
изображений
2. Микроэлектронные формирователи и преобразователи
измерительных сигналов
2.1 Формирование синусоидальных высокочастотных сигналов с
повышенной стабильностью амплитуды и линейностью характеристики управления по частоте
Наиболее распространенным методом формирования синусоидальных сигналов на повышенных частотах является метод, основанный на компенсации активных потерь в резонансном LC-контуре отрицательным сопротивлением, реализуемым с помощью, например, линейных усилителей с ПОС, КОС, электронных приборов с падающей вольтамперной характеристикой и т.д. На относительно низких частотах предпочтение отдается RC-генераторам, например, на основе моста Вина, так как на этих частотах для LC-генераторов требуются большие номиналы индуктивностей и емкостей, что для МЭУ нежелательно.
Получаемые таким или другим способом колебания оказываются недостаточно стабильными по амплитуде и по частоте, в особенности при их управлении. При этом характеристики управления, как правило, являются нелинейными, что определяет целесообразность их линеаризации и стабилизации.
Основополагающим методом решения данной проблемы является разработанный нами метод линеаризации и термостабилизации характеристик нелинейных элементов [4,7], изложенный в работах [1,2].
Применительно к управлению формируемых колебаний данный метод отличается лишь реализацией образцового преобразователя “параметр - напряжение”, который в данном случае должен быть преобразователем частоты в напряжение (ПЧН) при линеаризации характеристики управления по частоте и широкополосным амплитудным демодулятором (АД) (выпрямителем) при стабилизации амплитуды колебаний.
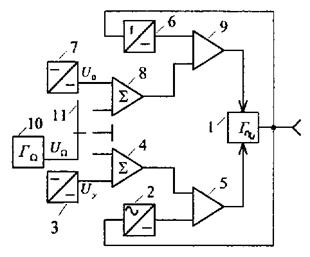 |
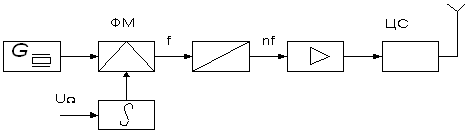
В соответствии с изложенным структурная схема управляемого автогенератора (рис.8) содержит собственно автогенератор 1, подсистему стабилизации амплитуды, включающую широкополосный АД 2, ИОН 3, сумматор 4 и сравнивающее устройство 5, а также подсистему линеаризации характеристики управления по частоте, включающую ПЧН 6, источник 7 управляющего напряжения, сумматор 8 и сравнивающее устройство 9. При необходимости управляемый автогенератор может быть дополнен генератором 10 модулирующего сигнала, с помощью которого посредством переключателя 11 может быть осуществлена амплитудная модуляция (АМ) (нижнее положение) или частотная модуляция (ЧМ) (верхнее положение) формируемого сигнала.
Рис. 8. Структурная схема управляемого по частоте и амплитуде
автогенератора
Принцип действия подсистем регулирования основан на сравнении преобразуемых сигналов, пропорциональных амплитуде и частоте, с опорными напряжениями ![]() и
и ![]() источников 3 и 7 соответственно с образованием разностных сигналов, которые после усиления в сравнивающих устройствах 5 и 9 изменяют состояние автогенератора 1 так, что его амплитуда и частота остаются неизменными. При изменении управляющего напряжения
источников 3 и 7 соответственно с образованием разностных сигналов, которые после усиления в сравнивающих устройствах 5 и 9 изменяют состояние автогенератора 1 так, что его амплитуда и частота остаются неизменными. При изменении управляющего напряжения ![]() в контуре регулирования частоты и опорного напряжения
в контуре регулирования частоты и опорного напряжения ![]() в контуре регулирования амплитуды соответствующим образом подстраиваются амплитуда и частота колебаний автогенератора. Одновременно возможно получение ЧМ и АМ колебаний, если к установленным напряжениям
в контуре регулирования амплитуды соответствующим образом подстраиваются амплитуда и частота колебаний автогенератора. Одновременно возможно получение ЧМ и АМ колебаний, если к установленным напряжениям ![]() и
и ![]() добавить с помощью переключателя 11 и сумматоров 4 и 8 соответствующий уровень модулирующего напряжения
добавить с помощью переключателя 11 и сумматоров 4 и 8 соответствующий уровень модулирующего напряжения ![]() от генератора 10.
от генератора 10.
В связи с тем что амплитуда регулирующих сигналов МЭУ, как правило, не превышает ![]() 10 В, в качестве сравнивающих устройств 5 и 9 подходят стандартные ОУ без обратной связи или с ООС определенного вида для улучшения динамических свойств регулирования с возможно большим коэффициентом передачи
10 В, в качестве сравнивающих устройств 5 и 9 подходят стандартные ОУ без обратной связи или с ООС определенного вида для улучшения динамических свойств регулирования с возможно большим коэффициентом передачи ![]() на постоянном токе, так как ошибка в стабилизации соответствующих параметров тем ниже, чем выше этот коэффициент [2].
на постоянном токе, так как ошибка в стабилизации соответствующих параметров тем ниже, чем выше этот коэффициент [2].
2.2. Теоретические основы управляемых автогенераторов
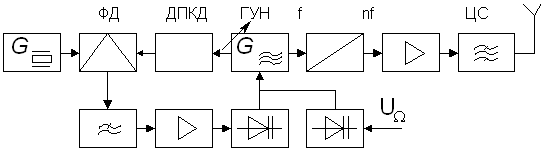
Эквивалентная схема замещения автогенератора (рис. 9) включает колебательный контур, представленный в виде двух противоположных по знаку реактивных сопротивлений ![]() с волновым сопротивлением
с волновым сопротивлением
![]() ,
(15)
,
(15)
эквивалентную активную составляющую проводимости
![]() , (16)
, (16)
широкополосный усилитель с комплексным коэффициентом передачи ![]() и управляемую полную проводимость
и управляемую полную проводимость ![]() . При этом реактивные составляющие входного сопротивления усилителя и монтажа схемы скомпенсированы на рабочей (резонансной) частоте
. При этом реактивные составляющие входного сопротивления усилителя и монтажа схемы скомпенсированы на рабочей (резонансной) частоте ![]() соответствующими реактивностями колебательного контура. Знак “-” перед реактивным сопротивлением соответствует емкости C, а знак “+” – индуктивности L колебательного контура. Активные составляющие колебательного контура
соответствующими реактивностями колебательного контура. Знак “-” перед реактивным сопротивлением соответствует емкости C, а знак “+” – индуктивности L колебательного контура. Активные составляющие колебательного контура ![]() и входа усилителя
и входа усилителя ![]() представлены в параллельной схеме замещения. Выходная проводимость усилителя удовлетворяет условию
представлены в параллельной схеме замещения. Выходная проводимость усилителя удовлетворяет условию
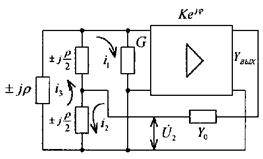 |
Рис. 9. Эквивалентная схема замещения управляемого генератора
При полной компенсации активных составляющих возникает генерация сигнала и, следовательно, выполняется баланс активных мощностей в колебательном контуре [8]:
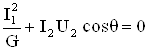 , (18)
, (18)
где ![]() ,
, ![]() и
и ![]() - модули токов и напряжения, соответствующие комплексным
- модули токов и напряжения, соответствующие комплексным ![]() ,
, ![]() и
и ![]() , представленным на рис. 9;
, представленным на рис. 9; ![]() - угол сдвига фаз между током
- угол сдвига фаз между током ![]() и напряжением
и напряжением ![]() в цепи ПОС.
в цепи ПОС.
Система уравнений, описывающая схему, представленную на (рис.9), и позволяющая определить величины, входящие в (18), имеет вид
![]()
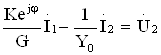 ,
,
 , (19)
, (19)
![]() .
.
Решая систему (19), получаем
 , (20)
, (20)
 . (21)
. (21)
Так как схема предназначена для компенсации только активной составляющей проводимости, целесообразно в качестве регулирующих использовать элементы с чисто активным, емкостным или индуктивным характером проводимости ![]() .
.
Рассмотрим возможность использования в качестве ![]() активной проводимости
активной проводимости ![]() , реализуемой на основе ПТ. При соблюдении условия (17)
, реализуемой на основе ПТ. При соблюдении условия (17)
![]() . (22)
. (22)
На основании (20)-(22) определяем величины, входящие в (18):
 , (23)
, (23)
 , (24)
, (24)
 , (25)
, (25)
где
 .
(26)
.
(26)
Подставляя (23)-(26) в (18) и учитывая (16), находим реализуемую отрицательную активную проводимость, компенсирующую проводимость колебательного контура
 . (27)
. (27)
При условиях ![]() и
и  , легко выполнимых на практике, выражение (27) упрощается
, легко выполнимых на практике, выражение (27) упрощается
![]() . (28)
. (28)
Погрешность, допускаемую при данных ограничениях, оценим на основании сравнения соотношений (27) и (28)
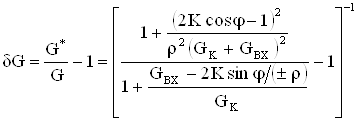 . (29)
. (29)
Если предположить, что в рабочем диапазоне частот усилитель не будет иметь фазового сдвига (![]() ), то выражение (29) упрощается
), то выражение (29) упрощается
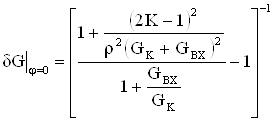 . (30)
. (30)
При неограниченном уменьшении входной проводимости усилителя по сравнению с проводимостью колебательного контура (![]() ) погрешность (30) реализации отрицательной активной проводимости
) погрешность (30) реализации отрицательной активной проводимости
![]() (31)
(31)
и схема (см. рис.9) позволяет получить высокую линейность компенсации проводимостей резонансного контура в широком диапазоне изменения его активной составляющей, связанной как с перестройкой по частоте ![]() (15), так и с изменением основных параметров (L,C).
(15), так и с изменением основных параметров (L,C).
При использовании управляемой проводимости (8.260) в виде емкости (![]() ) реализуемая отрицательная активная составляющая проводимости по аналогии с (28)
) реализуемая отрицательная активная составляющая проводимости по аналогии с (28)
![]() . (32)
. (32)
Для реализации схемой (см. рис.9) отрицательной проводимости необходимо в (32) обеспечить ![]() .
.
Проведенный анализ для случая ![]() показал, что схема, представленная на рис. 9, ведет себя так же, как и при
показал, что схема, представленная на рис. 9, ведет себя так же, как и при ![]() (32). Однако при реализации этого варианта в интегральном исполнении имеются трудности, связанные с проблемой индуктивности в микроэлектронике [1].
(32). Однако при реализации этого варианта в интегральном исполнении имеются трудности, связанные с проблемой индуктивности в микроэлектронике [1].
Похожие работы

а цифровых ИС можно реализовать практически любой алгоритм обработки сигнала, осуществляемый в приемно-усилительных устройствах, включая элементы оптимального радиоприема. Связные РПУ с частотной модуляцией проектируются для работы на одной фиксированной частоте или в диапазоне частот. В первом случае рабочая частота стабилизируется кварцевым резонатором, а для генерации ЧМ колебаний могут быть ...
... должен быть непосредственно связан с сетью, куда передается пакет. Разобравшись немного с теорией построения локальных сетей, перейдем к практической части построения локальной сети агентства недвижимости. 2. Организация локальной сети для агентства недвижимости 2.1 Постановка задачи Целью дипломной работы является организация локальной компьютерной сети для агентства недвижимости. Для ...
... ППИ. В случае обнаружения сбоев процессор выдает в определенный порт единицу, тем самым зажигая индикатор неисправности, и прекращает работу. При отсутствии неисправностей аппаратура готова к приему данных. Процесс передачи данных по каналу начинается после автоматического установления соединения с передающей станцией. УПС после принятия сигнала вызова включает цепь 125 «Индикатор вызова». В ...
... за которым следует устройство дискретизации (рисунок 4.2), подастся известный сигнал s(t) плюс шум AWGN n(t). 4.4 Межсимвольная интерференция На рисунке 4.3 а) представлены фильтрующие элементы типичной системы цифровой связи. В системе - передатчике, приемнике и канале - используется множество разнообразных фильтров (и реактивных элементов, таких как емкость и индуктивность). В передатчике ...
0 комментариев