Навигация
Системи спостереження за часовим положенням імпульсного сигналу (системи АСД)
18557
знаков
0
таблиц
5
изображений
2 Системи спостереження за часовим положенням імпульсного сигналу (системи АСД)
Системи спостереження за часовим положенням імпульсного сигналу застосовуються для автоматичного вимірювання дальності імпульсним радіолокатором; для виділення періодично повторюваних імпульсів на тлі перешкод у системах зв'язку з імпульсними піднесійними. Такі системи спостереження мають назву часових автоселекторів.
Функціональна схема системи подана на рис. 4. Радіолокаційний приймач відкривається (стробується) за допомогою часового автоселектора на короткі інтервали часу очікуваного приходу ехосигналу від обраної цілі. Ця міра підвищує завадостійкість прийому.
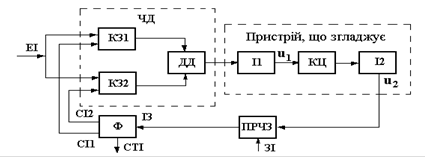
Рисунок 4 – Структурна схема часового авто селектора
Строб-імпульси формуються спеціальним формувачем Ф, що входить до складу часового автоселектора. До складу часового автоселектора входять також часовий дискримінатор ЧД, пристрій, що згладжує, пристрій регульованої часової затримки ПРЧЗ.
Поєднання в часі строб-імпульсів з ехосигналами цілі в кожному циклі зондування забезпечується роботою слідкувального автоселектора. З цією метою формувач Ф формує два селекторних імпульси СІ1 і СІ2. Імпульси прямокутної форми СІ1 і СІ2 розташовуються симетрично щодо середини строб-імпульсу і ідуть безпосередньо один за одним.
Згладжуючий пристрій містить два послідовно включених електронних інтегратори І1 і І2 і коригувальний RС - ланцюжок КЛ. Електронні інтегратори можна виконати, наприклад, на операційних підсилювачах.
Часовий дискримінатор містить два каскади збігів КЗ1 і КЗ2 на два входи кожен і диференціальний детектор ДД. Вихідна напруга каскадів збігів КЗ1 і КЗ2 утвориться в результаті збігу селекторних імпульсів СІ1 і СІ2 і ехосигналу цілі. Імпульси ІС1 і ІС2 детектуються і віднімаються в диференціальному детекторі, утворюють вихідну напругу дискримінатора.
Зондувальні імпульси ЗІ, що виробляються синхронізатором радіолокатора, запускають могутній імпульсний генератор, що формує радіоімпульси, випромінювані антеною, і одночасно запускають пристрій регульованої часової затримки ПРЧЗ автоселектора. Як ПРЧЗ можна використати, наприклад, фантастрон, пристрій часової затримки, що керується цифровим кодом.
Тривалість імпульсу затримки ІЗ, що виробляється фантастроном, залежить від величини керуючої напруги u2.
Від заднього фронту (спаду) імпульсу затримки запускається формуач селекторних імпульсів Ф. Перший селекторний імпульс формується мультивібратором, що очікує, а другий селекторний імпульс утвориться шляхом затримки першого на час, рівний його тривалості, за допомогою лінії затримки. При зміні керуючої напруги u2 селекторні імпульси зміщаються в часі щодо зондувального імпульсу в межах від нуля до 0,95Т3,, де Т3 – період повторення зондувальних імпульсів.
На часових діаграмах, що пояснюють функціонування автоселектора, ехоімпульс у момент часу t1 збігається з першим селекторним імпульсом СІ1. У результаті на виході каскаду збігів КЗ1 з'являється імпульс збігів ІЗ1, що зменшує по абсолютній величині напругу на виході першого інтегратора на величину Du1.1 У проміжку між імпульсами напруга на виході першого інтегратора зберігається постійною. Унаслідок зменшення напруги на виході першого інтегратора, вихідна напруга другого інтегратора, хоча і продовжує збільшуватися, але з меншою швидкістю.
В міру збільшення напруги на виході другого інтегратора зменшується тривалість імпульсу затримки З. Завдяки цьому в момент часу t2 селекторні імпульси СІ1 і СІ2 розташовуються відносно чергового ехоімпульса ЕІ так, що велика частина ЕІ перекривається з імпульсом СІ1, а менша - з імпульсом СІ2. Тепер утворяться два імпульси збігів, – ІЗ1 і ІЗ2, причому ІЗ1 має велику тривалість у порівнянні з ІЗ2. Імпульс ІЗ1 приводить до подальшого зменшення негативної напруги на виході першого інтегратора, а імпульс ІЗ2, навпаки, збільшує цю напругу. Оскільки тривалість ІЗ1 більше тривалості ІЗ2, то результуюча негативна напруга на виході першого інтегратора зменшується на величину Du1.2.
Однак ![]() . Напруга на виході другого інтегратора, хоча і про-довжує збільшуватися, але з меншою швидкістю, ніж у попередньому періоді. Збільшення напруги u2 приводить до подальшого зменшення тривалості імпульсу затримки ІЗ, у результаті чого селекторні імпульси в момент часу t3 виявляються так розташованими щодо ехоімпульса, що межа їх розділу поділяє ехоімпульс навпіл. У результаті цього тривалості імпульсів збігів ІЗ1 і ІЗ2 виявляються рівними, а збільшення напруги на виході першого інтегратора дорівнює нулю. Отже, збільшення напруги на виході другого інтегратора припиняється, також припиняється зміна тривалості імпульсу затримки ІЗ і в системі встановлюється стан рівноваги. Величина напруги u2 пропорційна дальності до цілі, а величина напруги u1 на виході першого інтегратора пропорційна швидкості цілі, якщо вона рухається.
. Напруга на виході другого інтегратора, хоча і про-довжує збільшуватися, але з меншою швидкістю, ніж у попередньому періоді. Збільшення напруги u2 приводить до подальшого зменшення тривалості імпульсу затримки ІЗ, у результаті чого селекторні імпульси в момент часу t3 виявляються так розташованими щодо ехоімпульса, що межа їх розділу поділяє ехоімпульс навпіл. У результаті цього тривалості імпульсів збігів ІЗ1 і ІЗ2 виявляються рівними, а збільшення напруги на виході першого інтегратора дорівнює нулю. Отже, збільшення напруги на виході другого інтегратора припиняється, також припиняється зміна тривалості імпульсу затримки ІЗ і в системі встановлюється стан рівноваги. Величина напруги u2 пропорційна дальності до цілі, а величина напруги u1 на виході першого інтегратора пропорційна швидкості цілі, якщо вона рухається.
У динаміці селекторні імпульси безупинно супроводжують ехоімпульс.
Під час руху цілі з постійною швидкістю в системі з двома інтеграторами ( з астатизмом другого порядку) помилка у визначенні швидкості і помилка у визначенні дальності ціль дорівнюють нулю. Але, якщо ціль рухається з прискоренням, з'являється помилка, пропорційна прискоренню. Для покращення якості перехідних процесів між інтеграторами включається корегуюче коло КК (форсуюча ланка). У ряді випадків для поліпшення завадостійкості включається також фільтр нижніх частот (інерційна ланка).
Захоплення цілі на початку роботи автоселектора виробляється або вручну оператором, що спостерігає оцінку цілі на екрані ЕЛПТ, або спеціальним автоматичним пристроєм пошуку і захоплення цілі.
У зв'язку з імпульсним характером сигналу інформація про неузгодженість Dt ( середини ехосигналу щодо стику селекторних імпульсів) утвориться в автоселекторі в дискретні моменти часу, що відстоять один від одного на період повторення зондувальних імпульсів. Тому, часовий автоселектор є дискретною (імпульсною) системою радіоавтоматики. Однак, якщо частота повторення зондувальних імпульсів велика в порівнянні з вищою частотою смуги пропущення автоселектора, що часто практикуєься, то можна вважати автоселектор безупинною системою. У такому припущенні побудуємо структурну схему автоселектора.
Часова неузгодженість Dt дорівнює: Dt=tc -tси.
При високій частоті повторення зондувальних імпульсів пульсації вихідної напруги часового дискримінатора, обумовлені імпульсним характером сигналу, ефективно згладжуються. У цьому випадку при аналізі автоселектора можна розглядати вихідну напругу дискримінатора, усереднену за період повторення імпульсів:
![]()
де F(Dt) і x(![]() ,Dt) – відповідно математичне чекання і флуктуаційна складова вихідної напруги дискримінатора.
,Dt) – відповідно математичне чекання і флуктуаційна складова вихідної напруги дискримінатора.
Форма дискримінаційної характеристики F(Dt) і параметри напруги x(t,Dt) залежать від співвідношення сигнал/шум, ширини смуги пропущення радіотракта, тривалості селекторних імпульсів і наявності амплітудних флуктуацій сигналу.
Перетворення напруги, що виконується пристроєм, що згладжує, визначається лінійним диференціальним оператором, ![]() , що враховує кількість інтегруючих ланок у складі автоселектора:
, що враховує кількість інтегруючих ланок у складі автоселектора:
![]()
Звичайно залежність величини затримки в схемі ПРЧЗ від керуючої напруги є безінерційною. Якщо вона, крім того, лінійна, то виконується співвідношення ![]() , де SРЕГ – крутість характеристики ПРЧЗ; tСИ0 – значення затримки за відсутності керуючої напруги. Величина tСИ0 може мати деяку нестабільність, яку необхідно враховувати при аналізі селектора.
, де SРЕГ – крутість характеристики ПРЧЗ; tСИ0 – значення затримки за відсутності керуючої напруги. Величина tСИ0 може мати деяку нестабільність, яку необхідно враховувати при аналізі селектора.
Наведеним співвідношенням відповідає структурна схема на рис. 5.
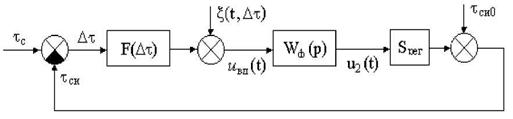
Рисунок 5 – Структурна схема слідкувальної системи
0 комментариев