Навигация
Разработка алгоритма работы микроконтроллера
32312
знаков
0
таблиц
8
изображений
4. Разработка алгоритма работы микроконтроллера
Программа работы микроконтроллера заключается в следующем:
при нажатии кнопки RESET (SB1) производится непрерывный (циклический) опрос датчика и сохранение полученных значений температуры в ОЗУ.
непрерывлый вывод полученных значений температуры на ЖКИ индикатор (цифровое отображение информации на экране)
формирование сигнала предупреждения с помощью блока светодиодов в случае выхода значения температуры за пределы 300С<Т<400С (согласно техническому заданию).
Алгоритм программы приведен на рисунке 4.1.
Первым действием в программе производятся начальные установки микроконтроллера. В них устанавливается указатель стека на последнюю ячейку ОЗУ, исходное состояние каналов связи с датчиками температуры и UART, скорость обмена по UART, разрешаются прерывания от таймера/счетчика0 и от UART, переписывается количество и индивидуальные адреса датчиков температуры из EEPROM в ОЗУ, в регистры записываются необходимые константы.
Когда начальные установки завершены, начинается часть программы, которая производит опрос датчика температуры. Она будет циклически повторятся, пока подводится питание к микроконтроллеру или пока не возникнет запрос на прерывание. Опрос датчика температуры начинается с сигнала сброса на линии (блок 2 рисунок 4.1) Затем следует команда игнорирования адреса датчика температуры SKIP ROM [CCh].
Команда начала измерения температуры CONVERT T [44h] (блок 4, рисунок 4.1) разрешает преобразование значений температуры в цифровой вид для датчика.
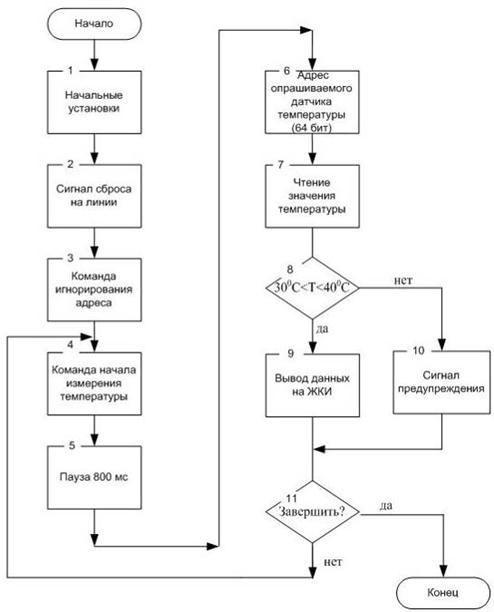
Рисунок 4.1 – Алгоритм работы микроконтроллера
Аналого-цифровое преобразование значений температуры занимает время от 750 мс до 800 мс. Поэтому, чтобы получить правильное значение температуры, необходимо выждать паузу 800 мс (блок 5, рисунок 4.1). Пауза выдерживается с помощью таймера/счетчика 0. Во время паузы можно совершать другие действия (например, произвести обмен данными с компьютером или вывести результаты на ЖКИ).
После паузы производится опрос датчика. Опрос датчика начинается с сигнала сброса на линии связи с датчиком (блок 6, рисунок 4.1). После сигнала сброса и ответного сигнала от датчика следует команда MATCH ROM [55h]. Эта команда сообщает датчику, что после неё на линии связи будет выставлен индивидуальный 64-х битовый адрес датчика. После того, как адрес выставлен на линии, датчик температуры сравнивает выставленный адрес со своим собственным адресом, и, после этого к работе с микроконтроллером датчик готов.
В блоке 7 производится чтение значения температуры и запись его в соответствующие ячейки ОЗУ.
В блоке 8 производится ветвление программы: если измеренное значение температуры не выходит за пределы 300С<Т<400С , то результат выводится на экран ЖКИ (блок 9). Если же измеренное значение температуры выходит за пределы диапазона, то загорятся световые индикаторы: VD1- если температура меньше 30 0С или VD2 –если больше 400С (блок 10).
Если необходимо продолжать измерять температуру (блок 11), то переходят к блоку 4, если нет, то тогда происходит завершение программы.
Программа работы микроконтроллера для измерения температуры приведена в приложении А.
Заключение
В данном курсовом проекте был разработан цифровой термометр, позволяющий снимать температуру датчиком температуры ТМР35, обрабатывать полученную информацию и выводить результат измерений в цифровом виде на экран ЖК индикатора. Также с помощью последовательного интерфейса возможна их передача на экран персонального компьютера для получения и сохранения неограниченного количество этих значений, проведения статистического анализа и слежение за изменением температуры во времени для разных этапов измерения.
В ходе проектирования были разработаны структурная и принципиальная электрическая схемы, алгоритм работ и текст программы для микроконтроллерной системы.
Таким образом, разработанный цифровой термометр является компактным, переносным устройством, дающим точную информацию о температуре, что позволяет расширить возможности измерений.
Список источников информации
1. Голубцов М.С., Кириченкова А.В. Микроконтроллеры AVR: от простого к сложному. Изд.2-е, испр. И доп. – М.: СОЛОН- Пресс, 2006. 304с.- (Серия «Биб-лиотека инженера»).
2. Китаев Ю.В. Основы программирования микроконтроллеров AT MEGA128 и 68HC908. Учебное пособие : СПб: СпбГУ ИТМО, 2007, 107с.
УДК 681.32
3. Low Voltage Temperature Sensors. TMP35/TMP36/TMP37
4. http://pdfserv.maxim-ic.com/arpdf/DS18S20.pdf. Датчики для измерения температуры.
5. Температурные измерения. Справочник./ Геращенко О.А. Гордов А.Н., Еремина А.К., и др.; отрв. Ред. Геращенко О.А.; АН УССР Ин-т проблем энергосбережения. – Киев: Наук. думка, 1989г. 704 с.
6. http://www.chip-dip.ru/product0/61922.aspx Кнопки тактовые.
Приложение А
Текст программы
; Системные определения для 320 STK/EVK
TOOL SET 0 ; 0 = STK/EVK ОЗУ
; 1 = Симулятор
; 2 = Встроенное ПЗУ
STACK EQU 003DEH ; Указатель стека
RAM_ORIG EQU 00200H ; Начальный адрес памяти ОЗУ
ROM_ORIG EQU 0C100H ; Начальный адрес памяти ПЗУ
IF TOOL = 0
I_VECTORS EQU 003FFH ; Вектора прерываний в ОЗУ
MAIN EQU RAM_ORIG+20H ; Стартовый адрес программы в ОЗУ
BTLOAD EQU 035H ; Прерывания раз в 0,5 сек.
ELSEIF TOOL = 1
I_VECTORS EQU 0FFFFH ; Вектора прерываний в ПЗУ
MAIN EQU ROM_ORIG ; Стартовый адрес программы в ПЗУ
BTLOAD EQU 011H ; Частые прерывания (не 1 сек)
ELSE
I_VECTORS EQU 0FFFFH ; Вектора прерываний в ПЗУ
MAIN EQU ROM_ORIG ; Стартовый адрес программы в ПЗУ
BTLOAD EQU 035H ; Прерывания раз в 0,5 сек.
.ENDIF
; Определения для АЦП на базе модуля TIMER PORT
TPCTL EQU 04BH ;Рег.управ.модулем TIMER PORT (04BH)
TPSSEL0 EQU 040H ;Источник тактирования:0=CMP,
;1=ACLK (Бит 6 в TPCTL)
ENB EQU 020 ;Контроль сигнала EN1 в TPCNT1
;1(+ENA=1)=CMP (Бит 5 в TPCTL)
ENA EQU 010H ;Контроль сигнала EN1 в TPCNT1
;1(+ENB=1)=CMP (Бит 4 в TPCTL)
EN1 EQU 008H ;Сигнал ENABLE в TPCNT1 только
;для чтения (Бит 3 в TPCTL)
RC2F EQU 004H ;Флаг перепол.TPCNT2(Бит2в TPCTL)
EN1FG EQU 001H ;Флаг EN1 (Бит 0 в TPCTL)
TPIE EQU 004H ;Разреш.прерыв.от TIMER(Бит3вIE2)
TPCNT1 EQU 04CH ;Младший байт счётчика
TPCNT2 EQU 04DH ;Старший байт счётчика
TP EQU 04EH ;Регистр данных TP(0–5=Выход TP,
;6=CPON,7=B16=2x8 Бит или1x16Бит
B16 EQU 080H ;Раздел.тайм-ы(0)или один16-бит(1)
CPO EQU 040H ;Компаратор выкл (0) / вкл (1)
TPDMAX EQU 002H ;бит вых.TPD.MAX(2=Бит1=TPD.1)
TPE EQU 04FH ;Рег.разреш.выходов 0–5=биты разреш
.TPD (6–7=ист.тактир.TPCNT2)
MSTACK EQU 03D2H ;1-е слово стека результата
PRESET EQU 0E8H ;Предустановка TPCNT2 для заряда С
;счёт останавливается при
;переполнении TPCNT2, значение
;рассчитано на постоянную врем.6RC
; Определения управляющих регистров
IE1 EQU 0H ;Регистр разрешения прерываний 1
IE2 EQU 01H ;Регистр разрешения прерываний 2
P01IE EQU 08H ;Разрешение прерываний отP0.1в IE1
BTIE EQU 080H ;Разреш.прерыв.от BASIC TIMER в IE2
IFG1 EQU 02H ;Регистр флагов прерываний 1
IFG2 EQU 03H ;Регистр флагов прерываний 2
LCDCTL EQU 030H ;Регистр управления ЖКИ
LCDM1 EQU 031H ;Первая ячейка памяти ЖКИ
BTCTL EQU 040H ;Регистр управления BASIC TIMER
BTCNT1 EQU 0046H ;Счётчик 1 BASIC TIMER
BTCNT2 EQU 0047H ;Счётчик 2 BASIC TIMER
WDTCTL EQU 0120H ;Регистр управления WATCHDOG
WDTHOLD EQU 080H ;Маска останова WATCHDOG
WDT_KEY EQU 05A00H ;Ключ доступа к WATCHDOG
WDT_STOP EQU 05A80H ;WATCHDOG маска + ключ
GIE SET 8H ;Общее разрешение прерываний
CPUOFF SET 10H ;Бит выключения CPU
OSCOFF SET 20H ;Бит выключения генератора
SCG0 SET 40H ;Контр.сист.тактирования,бит0
SCG1 SET 80H ;Контр.сист.тактирования,бит1
LPM0 SET CPUOFF ;Биты установки режима LPM0
LPM1 SET SCG0+CPUOFF ;Биты установки режима LPM1
LPM2 SET SCG1+CPUOFF ;Биты установки режима LPM2
LPM3 SET SCG1+SCG0+CPUOFF ;Биты установки режима LPM3
LPM4 SET OSCOFF+CPUOFF ;Биты установки режима LPM4
; Служебные регистры для вычисления сопротивления датчика
MLTPLR_HW EQU R5
TEN_K EQU R6
BITTEST EQU R7
MRESLT_HW EQU R8
MRESLT_LW EQU R9
LPCNTR EQU R10
RESULT EQU R11
; Начало программы
SECT ”MAIN”,MAIN
RESET MOV #STACK,SP ;Инициализация указателя стека
; Конфигурация периферии
SETUP
SETUPINT MOV.B #P01IE,&IE1 ;Разреш.P0.1/UART для S232
MOV.B #BTIE+TPIE,&IE2 ;Разреш.прерыв.от B.TIMER,&TMR.PORT
CLR.B &IFG1 ; Очистить все флаги прерываний
CLR.B &IFG2
EINT ;Разрешить прерывания
SETUPWDT MOV #WDT_STOP,&WDTCTL ; Остановить WATCHDOG TIMER
SETUPLCD MOV.B #0FFH,&LCDCTL ; ЖКИ STK, все сегменты, 4MUX
SETUPBT MOV.B #BTLOAD,&BTCTL ; Загруз.част.прерыв в BASIC TIMER
CLR.B &BTCNT1 ; Очистить счётчик BT 1
CLR.B &BTCNT2 ; Очистить счётчик BT 2
CLEARLCD MOV #15,R6 ; Очистить 15 ячеек памяти ЖКИ
CLEAR1 MOV.B #0,LCDM1–1(R6) ; записав туда «0»
DEC R6 ; Вся памяти ЖКИ очищена?
JNZ CLEAR1 ; нет, чистим дальше
; Начало основной программы
BEGIN BIS #LPM3,SR ; Установить SR-биты для LPM3
;Подпрограмма измерения с запрещёнными прерываниями. TP.2–.5 не
;используются поэтому переписаны. Используются только TPD.0 & 1.
;Начальная инициализация: Указатель стека = 0, Начало с TPD.1
;16–битный таймер, тактирование от MCLK, CIN разрешает счёт MEASURE PUSH.B #TPDMAX ;Сохранить в стеке для послед.использ.
CLR R8 ;Указатель для стека результата
MEASLOP MOV.B #(TPSSEL0*3)+ENA,&TPCTL
;TPCNT1 CLK=MCLK, EN1=1
;Конденсатор С заряжается на протяжении t>5нс.Используются выходы N–1
MOV.B #B16+TPDMAX–1,&TPD;один16-бит.счёт,выбор вых. заряда
MOV.B #TPDMAX–1,&TPE ; Разрешить выходы заряда
MOV.B #PRESET,&TPCNT2 ; Загрузить время заряда
BIS #CPUOFF,SR ; Режим понижен.потребления
MOV.B @SP,&TPE ;Разрешить только текущий датчик
CLR.B &TPCNT2
; Запрет.все прерыв.для обеспеч.непрерыв.работы тайм.и разряд конден.
DINT ; Запрет прерываний
CLR.B &TPCNT1 ; Очистить младший байт таймера
BIC.B @SP,&TPD ; Переключить все датчики в «0»
MOV.B #(TPSSEL0*3)+ENA+ENB,&TPCTL ;TPCNT1 CLK=MCLK,
; разрешить вход CIN
EINT ; Разрешить прерывания, общий старт
BIS #CPUOFF,SR ; Режим пониженного потребления
; EN=0:Завершение преобразования: 2X8 бит результата в MSTACK
; Сохранить результат в стеке
MOV.B &TPCNT2,MSTACK+1(R8)
; Сохранить старший байт результата
L$301 INCD R8 ; Инкремент адреса
RRA.B @SP ; Следующий выход TPD.X
JNC MEASLOP ; Если C=1 – завершение
INCD SP ; Убрать старший TPD из стека
; Вычисление сопротивления датчика
;Подпрограмма беззнакового умножения:MSTACK X TEN_K MRESLT_HW/MRESLT_LW
;Использованы рег.MSTACK,TEN_K,MLTPLR_HW,MRESLT_LW, MRESLT_HW, BITTEST
;Подпрограмма беззнакового умножения с накоплением
;(MSTACK X TEN_K) + MRESLT_HW|MRESLT_LW –> MRESLT_HW|MRESLT_LW
CALC_RES
MOV #10000,TEN_K ;Загрузить 10,000 десятичное в TEN_K
MPYU CLR MRESLT_LW ; 0 ? LSBS результата
CLR MRESLT_HW ; 0 ? MSBS результата
MACU CLR MLTPLR_HW ; 0 ? MSBS множителя
MOV #1,BITTEST ; Регистр проверки бит
L$002 BIT BITTEST,MSTACK ; Проверить текущий бит
JZ L$01 ; Если «0» ничего не делать
ADD TEN_K,MRESLT_LW ;Если «1»добавить множитель к резул
ADDC MLTPLR_HW,MRESLT_HW
L$01 RLA TEN_K ; Множитель X 2
RLC MLTPLR_HW
RLA BITTEST ; Проверить следующий бит
JNC L$002 ;Если бит в CARRY: завершить
; Подпрограмма беззнакового деления 32–бита на 16-бит
; Использованы регистры (MSTACK+2),MRESLT_LW,RESULT, LPCNTR, MRESLT_HW
; MRESLT_HW MRESLT_LW / (MSTACK+2) RESULT Остаток в MRESLT_HW
; По выходу: CARRY = 0: OK CARRY = 1: Частное > 16 Бит
DIVIDE CLR RESULT ; Очистить RESULT
MOV #17,LPCNTR ; Инициализация счётчика
DIV1 CMP MSTACK+2,MRESLT_HW
JLO DIV2
SUB MSTACK+2,MRESLT_HW
DIV2 RLC RESULT
JC RES_2_F ;Ошибка: RESULT > 16 Бит
DEC LPCNTR ; Декремент счётчика
JZ DIV3 ; 0: выход без ошибки
RLA MRESLT_LW
RLC MRESLT_HW
JNC DIV1
SUB MSTACK+2,MRESLT_HW
SETC
JMP DIV2
DIV3 CLRC ;Ошибки нет, C = 0
; Перевод сопротивления датчика в градусы Цельсия для отображения RES_2_F
CLR R12 ;Указат.на значение в табл.R
MOV #064H,R13 ;Поместить мин.темп.-1 в индик
JMP FIRST_CMP ;При первом сравн.1 не добав.
CHECK_R INCD R12 ;INC указат.на знач.в таб.cопрот.
DADD #1,R13 ;Десятичный инкремент счётчика
FIRST_CMP CMP RESIS_TAB(R12),RESULT
;Сравнить табличное значение с вычисленным сопротивлением
JNC CHECK_R ;Переход,если R датч.<табличного
;по адресу указателя
;Отобразить ”С” и знак «°» на ЖКИ
DISPLAY MOV.B #A+E+F+D,LCDM1+1 ;”С” ? дисплейная память ЖК
MOV.B #A+B+F+D,LCDM1+2 ;” °” (знак градуса)
; Отобразить значение, хранящееся в R13 в формате BCD на ЖКИ
MOV R13,R12 ;Копир.число в виде BCD в R12
MOV #LCDM1+4,R14 ;Младшая цифра в памяти ЖКИ; R14
BIC #0FFF0H,R13 ;Погасить всё,кроме младшей цифры
MOV.B LCD_TAB(R13),0(R14) ; Отпр.мл.цифру в ЖКИ
MOV R12,R13 ; Восстановить значение в R13
RRA R13 ; 4 сдвига
RRA R13
RRA R13
RRA R13
BIC #0FFF0H,R13 ; Погасить всё, кроме млад.цифры
MOV.B LCD_TAB(R13),1(R14) ;Отправить старшую цифру в ЖКИ
JMP BEGIN ; Переход к началу программы
; ЖКИ модуля STK
LCD_TYPE
A EQU01H
B EQU02H
C EQU10H
D EQU04H
E EQU80H
F EQU20H
G EQU08H
H EQU40H
LCD_TAB BYTE A+B+C+D+E+F ; Отображает”0”
.BYTE B+C ; Отображает”1”
.BYTE A+B+D+E+G ; Отображает”2”
.BYTE A+B+C+D+G ; Отображает”3”
.BYTE B+C+F+G ; Отображает”4”
.BYTE A+C+D+F+G ; Отображает”5”
.BYTE A+C+D+E+F+G ; Отображает”6”
.BYTE A+B+C ; Отображает”7”
.BYTE A+B+C+D+E+F+G ; Отображает”8”
.BYTE A+B+C+D+F+G ; Отображает”9”
; Табл.сопротив.30–40 °C. Значения = KОмыX1000–в 3 децимальных цифры
.EVEN ; Выравнивание по чётному адресу
RESIS_TAB
.WORD 12953 ;300C
.WORD 12666
.WORD 12378
.WORD 12090
.WORD 11858
.WORD 11626
.WORD 11393
.WORD 11161
.WORD 10929
.WORD 10353 ;400C
; Вектора прерываний
.EVEN ; Выравнивание по чётному адресу
.SECT ”INT_VECT”,I_VECTORS–31
.WORD RESET ; PORT0, Биты 2 .. 7
.WORD BTINT ; BASIC TIMER
.WORD RESET ; Нет источника
.WORD RESET ; Нет источника
.WORD RESET ; Нет источника
.WORD TPINT ; TIMER PORT
.WORD RESET ; Нет источника
.WORD RESET ; Нет источника
.WORD RESET ; Нет источника
.WORD RESET ; Нет источника
.WORD RESET ; WATCHDOG/TIMER, Режим таймера
.WORD RESET ; Нет источника
.WORD RESET ; UART
.WORD RESET ; P0.0
.WORD RESET ; NMI, Сбой генератора
.WORD RESET ; POR,Внеш. Reset, WATCHDOG
.END
Похожие работы
... Какие специализированные команды необходимо применять для опроса датчика? 2.3 Запуск и выполнение Скомпилированная программа представляет собой файл типа cof, который прошиваем на микроконтроллер ATmega 128 семейства AVR. Соединяем компоненты рабочей модели прибора, получаем сигнал с температурного датчика, считываем температуру окружающей среды. 3. Список используемой литературы ...

... : следить за загрязненностью и загазованностью производственных помещений, поддержание температурно-влажностного режима. Заключение В данном дипломном проекте, который называется “охранная система с дистанционным управлением” разработано устройство, предназначенное для охраны материальных ценностей от пожара и проникновения злоумышленников. Устройство подключается к персональному компьютеру ...
0 комментариев