Навигация
Требования к функциональным возможностям
21147
знаков
2
таблицы
6
изображений
1.5. Требования к функциональным возможностям
Проектируемый секундомер должен быть функциональным, и в тоже время простым в использовании. Минимально необходимый набор кнопок должен включать кнопки «пуск», «стоп», «сброс», функциональные возможности кнопок могут быть использованы в одной универсальной кнопки, с поочередным выполнением операций, либо за каждую операцию будет отвечать одна кнопка.
2. Разработка структурной схемы устройства.
При разработке структурной схемы цифрового секундомера будем исходить из назначения устройства, условий его работы, заданных параметров и технических требований к устройству
Структурная схема современного секундомера определяется основными требованиями: точность измерения, стабильностью питания, экономией энергии питания, удобства пользования. Составим структурную (укрупненную) схему цифрового секундомера.
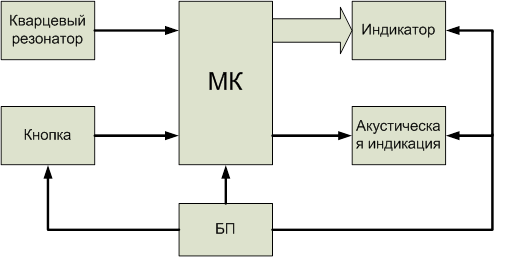
Рис 2.1 Структурная схема цифрового секундомера
Основной задачей решаемой при составлении структурной схемы является определение, и рациональное совмещение блоков устройства, которые подключаются к микроконтроллеру.
Проектируемый секундомер содержит следующие узлы:
1 Кварцевый резонатор с частотой fкв , работает как тактирующее устройство микроконтроллера. Резонатор обеспечивает наиболее удобную, подходящую частоту тактового генератора.
2 Кнопка, которая с поочередным, однократным нажатием будет выполнять три функции “Пуск/Стоп/Сброс”.
3 МК - микроконтроллер PIC16F628 по требованиям ТЗ.
4 БП - блок питания, обеспечивающий: питание микроконтроллера, питание световых индикаторов, питание акустической индикации, а также связан с кнопкой управления.
5 Индикатор - семисегментный индикаторы (ССИ) широко используются для отображения цифровой и символьной информации. Семь отображающих элементов позволяют высвечивать десятичные и шестнадцатеричные цифры, а также некоторые специальные знаки. Структура ССИ показана на рис. 2.2 . Для засветки одного сегмента большинства типов ССИ необходимо обеспечить протекание через сегмент тока 10-25 мА. В нашем случае потребуется четыре ССИ.
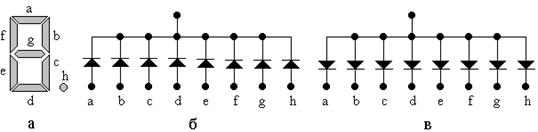
Рис. 2.2 Семисегментный индикатор: а- топология сегментов; б, в- принципиальные схемы
6 Акустическая индикация представляет собой следующее, подается импульс запуска на кнопку, который сразу поступает на звуковую индикацию, оповещая этим начало счета.
Для того чтобы реализовать данный секундомер на микроконтроллере PIC16F628, необходимо организовать цикл с задержкой в 0,1 с., затем подсчитывать эти импульсы и подавать на индикатор.
Если рассматривать принцип работы цифрового секундомера по структурной схеме, то с блока управления, подается импульс запуска, после которого происходит звуковая индикация, затем импульс запуска попадает на устройство задержки в микроконтроллере, в котором организована задержка на 0,1с. В качестве задержки используются два цикла: внутренний и внешний. Также в устройстве задержки организована проверка на переполнение счетчика и проверка нажатия кнопки “Стоп”. Количество подсчитанных секунд поступает на индикаторное устройство, в качестве которого используются семисегментные индикаторы.
3. Разработка принципиальной электрической схемы
Реализуем наш секундомер на базе микроконтроллера PIC16F628 согласно ТЗ рисунок 3.1
Рассмотрим те функциональное назначение выводов PIC16F628, которые будут использованы для проектирования.
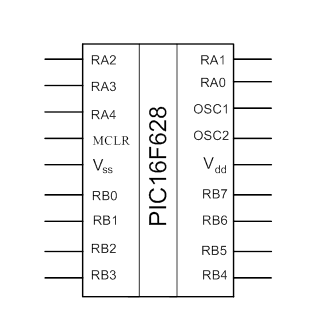
Рис.3.1 Микроконтроллер PIC16F628
Назначение выводов микроконтроллера PIC16f628 приведено в таблице 3.1.
Таблица 3.1
| Обозначение вывода | № вывода DIP | Тип 1/О/Р | Тип буфера в режиме ввода | Описание |
| 1 | 2 | 3 | 4 | 5 |
| RA0 | 17 | I/O | ST | Двунаправленный порт ввода/вывода, аналоговый вход компаратора |
| RA1 | 18 | I/O | ST | Двунаправленный порт ввода/вывода, аналоговый вход компаратора |
| RA2
| 1 | I/O | ST | Двунаправленный порт ввода/вывода, аналоговый вход компаратора |
| RA3 | 2 | I/O | ST | Двунаправленный порт ввода/вывода, аналоговый вход компаратора |
| RA4 | 3 | I/O | ST | Двунаправленный порт ввода/вывода (выход с открытым стоком), вход внешнего тактового сигнала для TMR0, выход компаратора |
| MCLR | 4 | I | ST | Вход сброса микроконтроллера, вход напряжения программирования. Когда вывод настроен как –MCLR, то по низкому уровню сигнала производится сброс микроконтроллера. При нормальной работе напряжение на выводе не должно превышать VDD |
| OSC2 | 15 | I/O | ST | Двунаправленный порт ввода/вывода, выход генератора для подключения резонатора. |
| OSC1 | 16 | I/O | ST | Двунаправленный порт ввода/вывода, вход генератора для подключения резонатора, вход внешнего тактового сигнала, вывод ER-смещения |
| RB0 | 6 | I/O | TTL/ST | Двунаправленный порт ввода/вывода с программным включением подтягивающего резистора, вход внешнего прерывания |
| RB1 | 7 | I/O | TTL/ST | Двунаправленный порт ввода/вывода с программным включением подтягивающего резистора, вход приемника USART, линия данных в синхронном режиме USART |
| RB2 | 8 | I/O | TTL/ST | Двунаправленный порт ввода/вывода с программным включением подтягивающего резистора, выход передатчика USART, линия тактового сигнала в синхронном режиме USART |
| RB3 | 9 | I/O | TTL/ST | Двунаправленный порт ввода/вывода с программным включением подтягивающего резистора, вывод модуля ССР |
| RB4 | 10 | I/O | TTL/ST | Двунаправленный порт ввода/вывода с программным включением подтягивающего резистора. Изменение сигнала на входе может вывести микроконтроллер из режима SLEEP |
| RB5 | 11 | I/O | TTL | Двунаправленный порт ввода/вывода с программным включением подтягивающего резистора. Изменение сигнала на входе может вывести микроконтроллер из режима SLEEP |
| RB6 | 12 | I/O | TTL/ST | Двунаправленный порт ввода/вывода с программным включением подтягивающего резистора. Изменение сигнала на входе может вывести микроконтроллер из режима SLEEP. Выход генератора таймера 1 |
| RB7 | 13 | I/O | TTL/ST | Двунаправленный порт ввода/вывода с программным включением подтягивающего резистора. Изменение сигнала на входе может вывести микроконтроллер из режима SLEEP. Вход генератора таймера 1 |
| VSS | 5 | P | - | Общий вывод для внутренней логики и портов ввода/вывода |
| VDD | 14 | P | - | Положительное напряжение питания для внутренней логики и портов ввода/вывода |
В настоящее время выпускается ряд серий однокристальных микро-ЭВМ, предназначенных для использования в бытовой радиоэлектронной аппаратуре. Применение однокристальных микро-ЭВМ, реализующих на одной БИС функции ввода-вывода, хранения и обработки данных, позволяет достигать максимальной простоты и дешевизны систем управления.
С целью экономии энергии источника питания, для отображения измеряемого времени применим четырехразрядный цифробуквенный индикатора из семи сегментов в каждом разряде типа 7SEG-MPX4-СС, подключаемого по схеме с общим катодом. Сегменты индикаторов присоединяем непосредственно к выводам 6-12 микроконтроллера, через ограничительные резисторы R4-R10, каждый номиналом 220 Ом.
Структура индикатора представлена на рис.3.2, и назначение выводов описано таблицей 3.2.
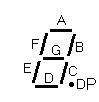 |
 Рис 3.2 Назначение выводов индикатора 7SEG-MPX4-СС. Таблица 3.2
Рис 3.2 Назначение выводов индикатора 7SEG-MPX4-СС. Таблица 3.2 | Цифра, знак | Выводы | |
| анод | катод | |
| 0 1 2 3 4 5 6 7 8 9 точка | 1,6,7,8,13,14 8,13 2,6,7,13,14 2,6,7,8,13,14 1,2,8,13 1,2,7,8,14 1,2,6,7,8,14 8,13,14 1,2,6,7,8,9,13,14 1,2,7,8,9,13,14 9 | 4, 12 |
На контроллер непосредственно подводится питание (+5В) на выводы: VDD – положительное напряжение, VSS – общий вывод. Для использования схемы внутреннего аппаратного сброса на вход сброса/напряжения прогроммирования (MCLR) через резистор сопротивлением 10 кОм подводится высокий уровень (VDD).
Входную тактовую частоту зададим при помощи внутреннего генератора в режиме ХТ малого энергопотребления, настроенного на частоту 4 МГц. Для этого используем резонатор с параллельным резонансом. Резистор RS использовать не будем, считаем что резонатор не будет самовозбуждаться. Конденсаторы С1 и С2 возьмем по 20 пФ (пределы 15..33пФ), т.к. более высокая емкость, увеличивая стабильность частоты генератора, увеличивает и время запуска, что не желательно. Схем подключения резонатора приведена на рис.3.3.
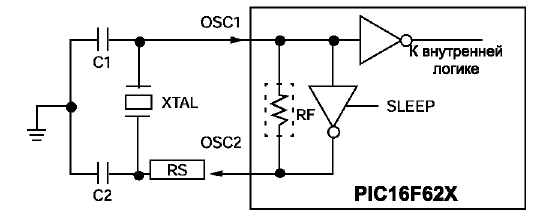
Рис.3.3 Схем подключения резонатора в режиме ХТ
Кнопку S1 «старт/стоп/сброс» подключаем непосредственно ко входу PIC контроллера. При помощи кнопки S2 подаем питание на микроконтроллер. Кнопка S1 подключена через резистор R1 = 10кОм, к порту RB7 (резистор задает уровень логической единицы на входе микроконтроллера).
Чтобы обеспечить хорошее питание схемы, применим сглаживающие фильтры С3=100мкФ, С4=1пФ, которые сглаживают пульсацию напряжения на входе микроконтроллера.
Звуковая индикация происходит при помощи динамика, подключаемого к порту RA4. Резистор R1=5кОм стабилизирует ток через динамик.
При подаче напряжения на микроконтроллер, начинает выполняться программа, записанная в микроконтроллере. Вначале производится инициализация всех портов микроконтроллера (порт RB7 настраивается на ввод, а остальные порты настраиваются на вывод), обнуление рабочих регистров, занесение необходимых констант в соответствующие регистры, а затем программа ожидает нажатия кнопки. Т.к. подсчет секунд не производился, то на индикаторы выводятся нули.
При нажатии кнопки, происходит звуковая индикация, программа формирует нужные задержки, инкрементируя при этом значения регистров в соответствии с необходимой отображаемой информацией. Через ограничительные резисторы R4-R10 подаются сигналы для управления сегментами индикатора.
При очередном нажатии клавиши происходит остановка выполнения программы, секундомер ожидает обнуления, а на индикатор выводится последняя подсчитанная последовательность цифр.
Электрическая принципиальная схема, спецификация элементов секундомера, приведены в приложении.
4.Разработка алгоритма работы управляющей программы
Для обеспечения работы проектируемого устройства с заданными техническими требованиями необходимо запрограммировать наш микроконтроллер на определенную обработку данных и выдачу определенных сигналов. Управляющая программа должна обеспечить работу секундомера. Обеспечив цикл с задержкой в 0.1 с., а затем, подсчитав количество импульсов, пришедших в конце каждого цикла, мы и производим подсчет секунд. Счёт начинается при нажатии кнопки. Для составления программы необходимо сначала составить алгоритм работы устройства, т.е. конечный набор правил для выполнения некоторых процедур.
Схема алгоритма – одна из важнейших частей задачи, она состоит из отдельных операторов. Различают четыре вида операторов, каждый из которых имеет вход и выход рис.4.1 Стрелками обозначаются направление хода вычислений. 
(1) (2) (3) (4) (5)
(1) – оператор описание процесса обработки;
(2) – оператор проверки условий;
(3) – оператор начала (конца);
(4) – оператор разрыва схемы;
(5) – оператор ввода/вывода данных.
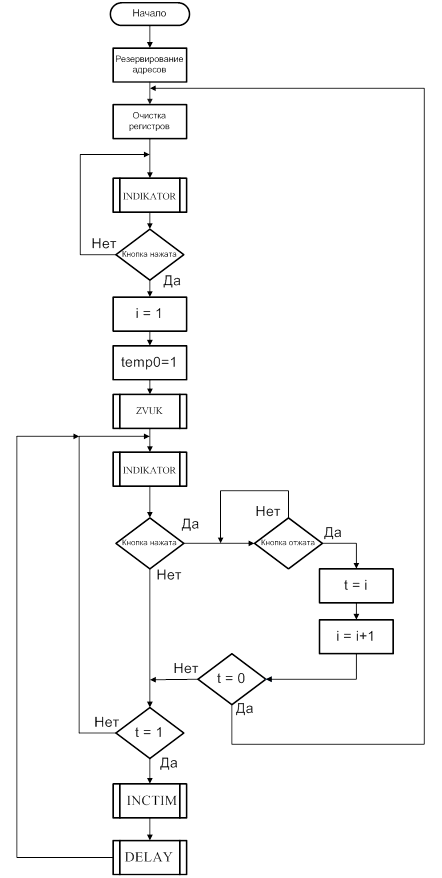
Рис.4.1 Виды операторовПрименим в нашем случае разветвленный алгоритм (см. приложение A).
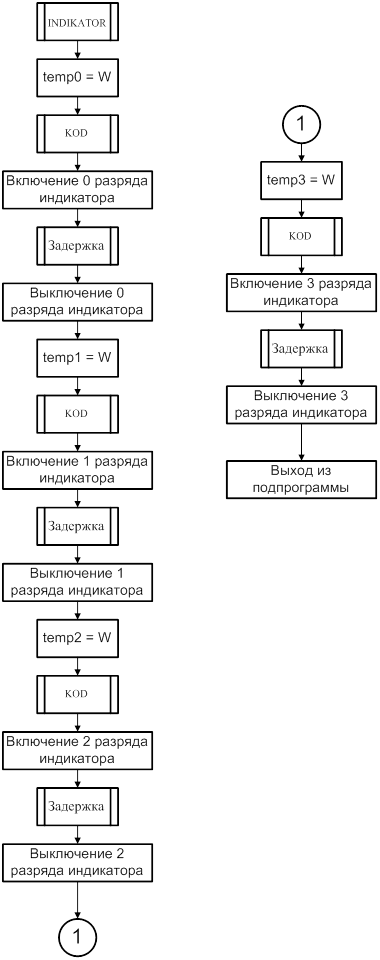
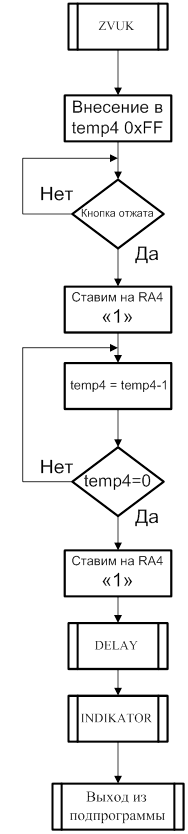
Работа нашей программы начинается с инициализации используемых регистров. Затем производится настройка портов, очистка ячеек памяти, задаются временные циклы, используемые для формирования требуемых величин задержек при работе. Происходит звуковая индикация, время задержки, в течении которой подается сигнал на динамик, равно 829мкс., т.е. с частотой около 1,2кГц, слышимой человеком. Подключаются подпрограммы INDIKATOR и KOD, необходимые для вывода подсчитанных секунд на семисегментные индикаторы.
5.Разработка управляющей программы
Программа, обеспечивающая работу нашего секундомера, написана на языке Assembler и построена в виде основной программы и подпрограмм.
Основная программа выполняет начальные установки режимов работы и регистров. Порты RA0-RA3 и RB0-RB6 настроены на вывод информации, порты RB0-RB6 отвечают за соответствующие сегменты индикатора. Порт RB7 считывает значение с кнопки. Порт RA4 производит вывод логической единицы, для звуковой индикации, которая осуществляется с помощью подпрограммы ZVUK, по первому нажатию кнопки. Подпрограммы INDIKATOR и KOD, необходимы для выработки сигналов, которые управляют семисегментными индикаторами. Подпрограмма DELAY формирует основную задержку на 0,1 с., задержка формируется одним внутренним и одним внешним циклами. Подпрограмма INCTIM меняем, в соответствии с отображаемыми цифрами, значения регистров temp0- temp3, для индикации.
Работа программы осуществляется по циклу. Вначале производится инициализация портов, очистка рабочих регистров. Запуск программы осуществляется нажатием кнопки “Пуск/Стоп/Сброс”. Внутри цикла осуществляется проверка на переполнение секундомера (если оно произошло, то происходит обнуление всех регистров и программа ожидает нажатия кнопки “Пуск/Стоп/Сброс”). При нажатии кнопки “Пуск/Стоп/Сброс” происходит остановка подсчета секунд, и программа ожидает обнуления. Текст программы приведен ниже.
LIST P=16F628
#include <P16F628.INC>
temp0 EQU H'20'
temp1 EQU H'21'
temp2 EQU H'22'
temp3 EQU H'23'
temp4 EQU H'24'
temp5 EQU H'25'
temp6 EQU H'26'
temp7 EQU H'27'
temp8 EQU H'28'
i EQU H'29'
t EQU H'30'
k EQU H'31'
N0 EQU H'32'
N1 EQU H'33'
org 0
goto Start
Start
clrf PORTA
bsf STATUS,RP0
movlw B'10000000'
movwf TRISB ;Настроить RB7 на ввод, RB0-RB6 на вывод
clrf TRISA
bcf STATUS,RP0
clrf PORTB
k1
clrf temp0
clrf temp1
clrf temp2
clrf temp3
clrf temp4
clrf temp5
clrf temp6
clrf temp7
clrf temp8
clrf i
clrf t
call INDIKATOR
btfss PORTB,7
goto k1
MOVLW 1
MOVWF i
MOVLW 1
MOVWF temp0
call ZVUK
goto c1
k2
call DELAY
c1
call INDIKATOR
btfsc PORTB,7
goto k3
c2
btfss i,0
goto c1
k7
call INCTIM
goto k2
k3
btfsc PORTB,7
goto k3
movf i,0
movwf t
incf i
btfss t,0
goto k1
goto c2
INCTIM
movlw 0xe6 ;230 раз
movwf temp4
k8 decfsz temp4,1
goto k8
;увеличение до 0,9 сек
incf temp0
movf temp0,0 ;инкрементировать на 0,1 сек
sublw 9 ;проверка: если >9, то перейти
btfsc STATUS,0 ;был заем - да, то clrf temp0 и на следующее увеличение
goto I0 ;иначе на IO
clrf temp0 ;очистка значения последнего разряда
;увеличение до 9 сек
incf temp1
movf temp1,0
sublw 9
btfsc STATUS,0
goto I1
clrf temp1
;увеличение до 59 сек
incf temp2
movf temp2,0
sublw 5
btfsc STATUS,0
goto I2
clrf temp2
;увеличение 10 мин
incf temp3
movf temp3,0
sublw 9
btfsc STATUS,0
goto I3
clrf temp3
return
I0
nop
nop
nop
nop
nop
I1
nop
nop
nop
nop
nop
I2 nop
nop
nop
nop
nop
I3 nop
nop
nop
nop
nop
return
INDIKATOR
movf temp0,0
call KOD
movwf PORTB
bsf PORTA,0 ;общий катод
nop
nop
nop
nop
bcf PORTA,0
movf temp1,0
call KOD
movwf PORTB
bsf PORTA,1
nop
nop
nop
nop
bcf PORTA,1
movf temp2,0
call KOD
movwf PORTB
bsf PORTA,2
nop
nop
nop
nop
bcf PORTA,2
movf temp3,0
call KOD
movwf PORTB
bsf PORTA,3
nop
nop
nop
nop
bcf PORTA,3
return
KOD
addwf PCL
retlw B'00111111' ;код 0
retlw B'00000110' ;код 1
retlw B'01011011' ;код 2
retlw B'01001111' ;код 3
retlw B'01100110' ;код 4
retlw B'01101101' ;код 5
retlw B'01111101' ;код 6
retlw B'00000111' ;код 7
retlw B'01111111' ;код 8
retlw B'01101111' ;код 9
ZVUK
movlw 100
movwf temp4
k6
btfsc PORTB,7
goto k6
bsf PORTA,4
k5
decfsz temp4,1
goto k5
bcf PORTA,4
call DELAY
call INDIKATOR
return
DELAY
movlw 0x81 ;128
MOVWF k ;k=ff=255
Cycl_1
movlw 0xff
movwf N0
Cycl_0
decfsz N0,1
goto Cycl_0
decfsz k,1
goto Cycl_1
return
end
Заключение.
Результатом курсового проекта является разработанная принципиальная электрическая схема цифровой секундомер на базе микроконтроллера PIC16F628 в соответствии с техническими требованиями. Разработан алгоритм и написана программа на языке assembler, на основании которой работает микроконтроллер.
Данное устройство очень просто в реализации. Оно содержит минимум элементом, что обеспечивает его дешевизну, и минимизацию затрат на питание. Благодаря простому управлению и индикации пользователь может легко им пользоваться.
В ходе проектирования приобретен опыт работы и умение проектировать цифровые и микропроцессорные устройства.
В ходе проектирования передатчика использовались программы: Microsoft Word, Microsoft Visio, Mplab IDE v7.20.
Список использованной литературы
1.PIC16F62X. Однокристальные 8-разрядные FLASH CMOS с микроконтроллеры компании Microchip technology incorporated: Пер. с англ. –М.: ООО «Микрочип», 2001. – 148 c. www.microchip.ru
2. Бурак А.И., Левкович В.Н. Интегрированная среда MPLab IDE разработки программ для микроконтроллеров PICmicro фирмы Microchip: Метод. пособие к лабораторным работам по курсу «Цифровые и микропроцессорные устройства». – Мн: БГУИР, 2003. – 31 с.
3.Левкович В.Н. Цифровые и микропроцессорные устройства: Лабораторный практикум для студ. спец. I-39 01 02 «Радиоэлектронные системы», I-39 01 03 «Радиоинформатика», I-39 01 04 «Радиоэлектронная защита информации». В 2 ч. Ч. 1. –Мн: БГУИР, 2005. - 38 с.: ил
4.Левкович В.Н., Кащеев А.А. Цифровые и микропроцессорные устройства: Лабораторный практикум для студ. спец. I-39 01 02 «Радиоэлектронные системы», I-39 01 03 «Радиоинформатика», I-39 01 04 «Радиоэлектронная защита информации».
В 2 ч. Ч. 2. –Мн: БГУИР, 2006. - 36 с.: ил.
Похожие работы
... изменение. 3. Что такое термодинамическая вероятность состояния (статистический вес). 4. Статистический смысл изменения энтропии. 5. Первый закон термодинамики. 6. Вывод рабочей формулы (36) данной работы. 7. Второй закон термодинамики и его статистический смысл. 6. ОПРЕДЕЛЕНИЕ ТЕМПЕРАТУРЫ И УДЕЛЬНОЙ ТЕПЛОТЫ ПЛАВЛЕНИЯ МЕТАЛЛА Цель работы Исследовать фазовый переход первого рода ...
... , нужно посредством правил подсчета значащих цифр округлить результат математических вычислений так, чтобы точность их соответствовала точности данных, полученных от измерения. ИЗУЧЕНИЕ КИНЕМАТИКИ И ДИНАМИКИ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ НА МАШИНЕ АТВУДА Цель работы Экспериментальная проверка основных уравнений и законов поступательного движения тела на специально сконструированной для этого ...
... культуры и спорта. Неоднократно менялась программа по физической культуре (с 1987 г. семь программ). В дипломной работе мы исследуем состояние физической подготовленности школьников старшего возраста школы № 723 г. Москвы. Физическое воспитание – это вид воспитания, специфическим содержанием которого является обучение движениям и управление развитием физических качеств человека. ...
... Аорта 30-60 Большие артерии 20-40 Вены 10-20 Малые артерии, артериолы 1-10 Венулы, малые вены 0.1-1 Капилляры 0.05-0.07 Ограничения, налагаемые на частотный диапазон существующих допплеровских измерителей скорости кровотока, обусловлены, в основном, двумя причинами: сложностью получения приемлемых параметров УЗ преобразователя, выполненного на основе пьезокерамики, для работы на ...
0 комментариев