Навигация
Элементы теории автоматического регулирования
17317
знаков
1
таблица
0
изображений
CЕВАСТОПОЛЬСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ ЯДЕРНОЙ ЭНЕРГИИ И ПРОМЫШЛЕННОСТИ
КОНТРОЛЬНАЯ РАБОТА ПО ДИСЦИПЛИНЕ
«Контроль и управление в химико-технологических процессах»
Тема: ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Выполнил:Студент заочного отделения
Факультета ЯХТ
Д-35б
Бурак Л.А.
Севастополь
2007
1. Общие понятия об автоматическом управлении и регулировании
Под управлением понимается совокупность действий, обеспечивающих протекание процесса с целью достижения требуемых результатов. Обеспечение всего комплекса возможных операций по управлению каким-либо процессом называется автоматическим управлением, а совокупность технических средств, посредством которых решается эта задача, называется системой управления.
Различают автоматические и автоматизированные системы управления. Системы автоматического управления САУ работают без участия человека. Они применяются для управления отдельными машинами, агрегатами, технологическими процессами. Автоматизированные системы управления АСУ предполагают наличие человека в процессе управления и применяются прежде всего для организационного управления, объектом которого являются коллективы, предприятия. Автоматизированные системы управления технологическими процессами называют АСУТП.
Система автоматического управления содержит управляемый объект и автоматическое управляющее устройство. Управляемый объект - устройство (совокупность устройств), осуществляющее технологический процесс. Автоматическое управляющее устройство осуществляет воздействие на управляемый объект в соответствии с алгоритмом управления.
Управляющее воздействие вырабатывается путем сравнения действительного (измеренного) и заданного значений управляемой величины и осуществляется при помощи устройств - автоматических регуляторов.
Алгоритм управления - совокупность предписаний, определяющих характер управляющих воздействий на объект и обеспечивающих выполнение алгоритма функционирования.
Алгоритм функционирования - совокупность предписаний, определяющих правильное выполнение технологического процесса.
Управляемая и регулируемая величина - параметр технологического процесса (давление, температура, уровень и т.д), значение которого автоматический регулятор поддерживает постоянным или изменяет в соответствии с заданным законом изменения.
Нерегулируемые величины, влияющие на регулируемую величину, называют возмущающими воздействиями или возмущениями (изменение температуры и давления окружающей среды, колебания электрического напряжения в питающей сети и т.д.).
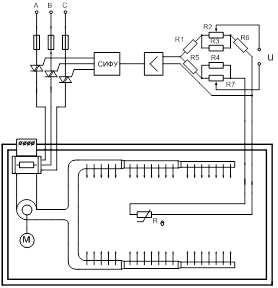
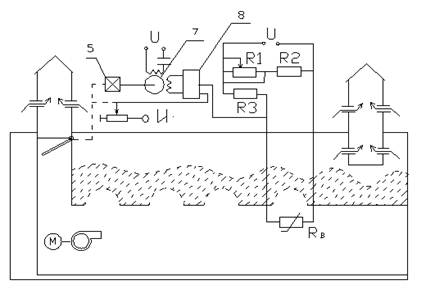
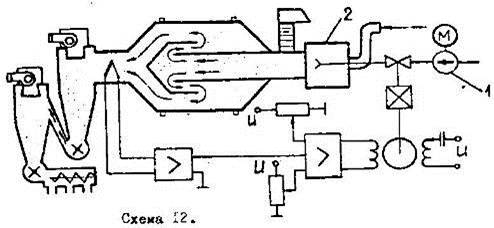
На рис. 1 показана схема ручного регулирования температуры в электропечи для закалки металла. Контроль температуры в электропечи осуществляется при помощи термопары.
Входная величина термопары -температура в, а выходная - электрическое напряжение U, которое поступает на вторичный показывающий прибор. Человек, обслуживающий электропечь, судит о температуре в ней по углу поворота стрелки φ вторичного прибора. В случае отклонения температуры от заданного значения он производит перемещение S движка реостата в соответствующую сторону, изменяя сопротивление r в электрической цепи нагрева печи.
Для автоматизации процесса регулирования температуры необходимо проанализировать функции человека в этом процессе. Его функции сводятся к перемещению движка реостата в зависимости от наблюдаемого им отклонения температуры.
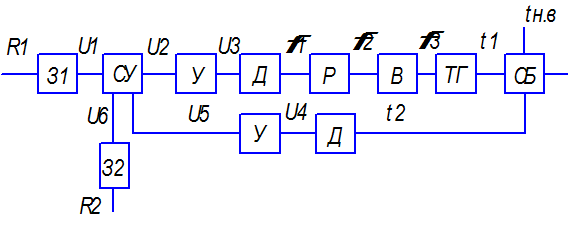
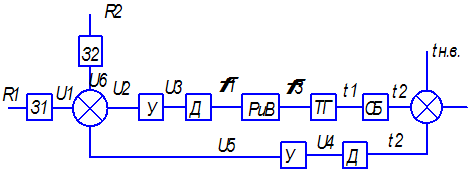
Перемещение движка реостата может осуществлять привод (сервопривод) , если на его вход подавать напряжение, соответствующее отклонению температуры в электропечи. Для этого напряжение на выходе термопары U1 сравнивается с образцовым напряжением U0, которое соответствует требуемой температуре Ө0, усиливается до необходимой величины и подается на привод (рис. 8.2).
Разность напряжений U = Ul - U0 называют рассогласованием. Оно пропорционально отклонению температуры от требуемого значения, т.е. ошибке регулирования. Следовательно, рассогласование (ошибка) – движущий сигнал.
Автоматические системы регулирования содержат следующие функциональные типовые элементы:
1. Чувствительные, или измерительные, элементы. Они воспринимают изменение регулируемого параметра и придают сигналу форму, удобную для сравнения с управляющим сигналом. В рассмотренном примере (рис. 8.2) измерительный элемент - это термопара.
2. Элементы сравнения, предназначенные для определения рассогласования между действительным и заданным значениями регулируемого параметра и выдачи управляющего сигнала. Чаще всего их выполняют в сочетании с задающим устройством.
3. Усилительные элементы, усиливающие сигнал, идущий от элемента сравнения к исполнительному элементу.
4. Исполнительные элементы. Они непосредственно воздействуют на регулирующий орган объекта регулирования.
5. Регулирующие элементы объекта регулирования (реостат, задвижка и т.д.). В системе автоматического регулирования, показанной на рис. 2, регулирующий элемент - реостат.
6. Корректирующие элементы, придающие системе регулирования требуемые динамические свойства.
Зависимость выходной величины элемента или системы от входной в установившемся режиме называют статической характеристикой, а в переходном режиме - динамической характеристикой звена или системы.
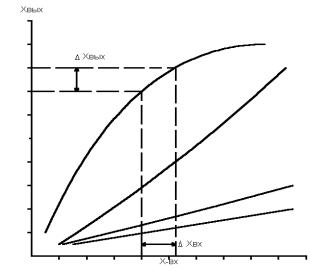
Линейная статическая характеристика обычно оценивается углом наклона описывающей ее кривой к оси абсцисс. Аналитически статическая характеристика может быть выражена через тангенс угла наклона. Чаще всего статические характеристики представляют в виде графиков, по оси абсцисс которых откладывается значение входной, а по оси ординат - выходной величины.
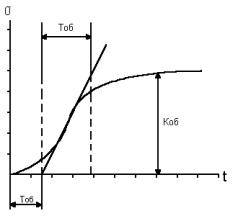
Динамические характеристики аналитически выражаются дифференциальными уравнениями, а графически - кривыми в системе координат, где по оси абсцисс откладывается время, а по оси ординат - значение выходной величины (при определенном значении входной величины).
Похожие работы
... методику проектирования систем регулирования и позволяет создавать высокоэффективные автоматические системы для самых различных отраслей народного хозяйства. Полученные таким образом системы автоматического регулирования обеспечивают высокое качество выпускаемой продукции, снижают ее себестоимость и увеличивают производительность труда. 1. Общая часть. 1.1. Основные понятия Преобразование ...
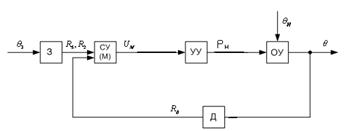
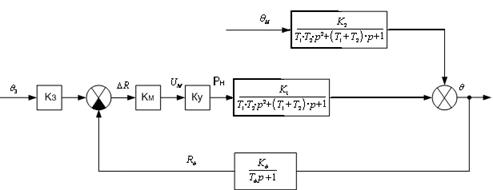
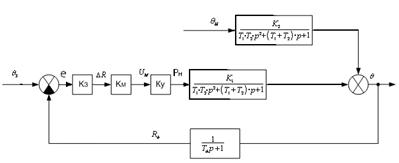
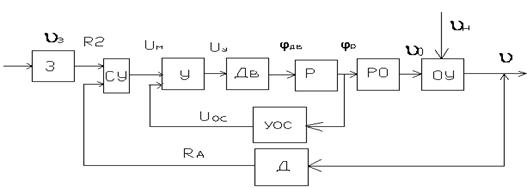
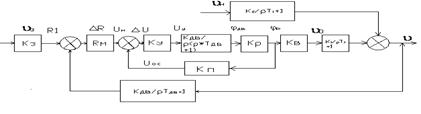
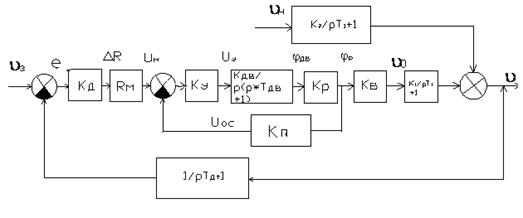
... системе реализован принцип управление по отклонению (по ошибке). Система является стабилизирующей. 2. Составление структурной схемы системы автоматического регулирования температуры в животноводческом помещении Структурной схемой называется наглядное графическое изображение математической модели (математического описания) системы. При математическом описании систему разбивают на отдельные ...
... по управляющему воздействию САР температуры приточного воздуха в картофелехранилище. Рис.8 Переходная функция по возмущающему воздействию САР температуры приточного воздуха в картофелехранилище. Быстродействие системы оценивается временем регулирования. Время регулирования определяется как интервал времени от начала переходной функции до момента, когда отклонение выходной величины от ее ...
... вывод: В системе реализован принцип управления по отклонению. Система является стабилизирующей. 2. Составление структурной схемы системы автоматического регулирования температуры теплоносителя в агрегате АВМ Структурной схемой называется наглядное графическое изображение математической модели (математического описания) системы. При математическом описании систему разбивают на отдельные ...
0 комментариев