Навигация
Вычислительный эксперимент
55270
знаков
0
таблиц
34
изображения
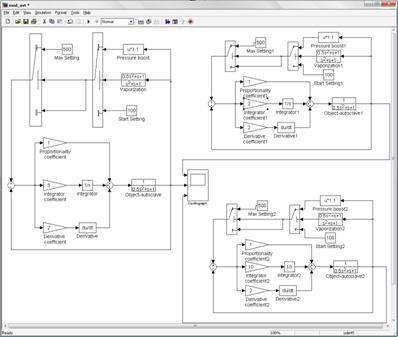
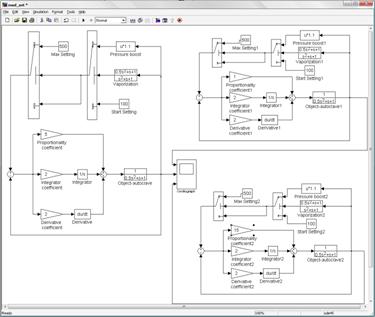
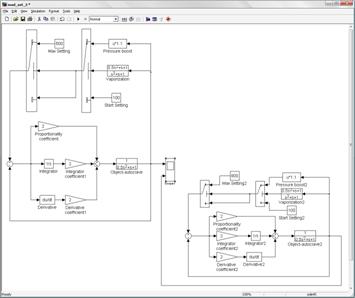
3. Вычислительный эксперимент
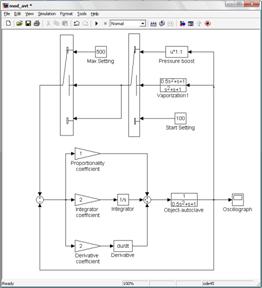
ПИД-регулятор, который и будет подвергаться настройке
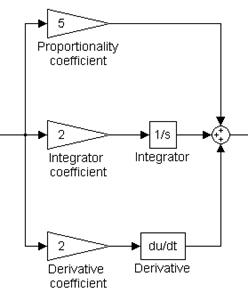
Proportionality coefficient – настраиваемый коэффициент пропорциональности (П)
Integrator coefficient + Integrator - интегрирующая составляющая с коэффициэнтом интегрирования (И)
Derivative coefficient + Derivative - коэффициэнт интегрирования (интегрирующая составляющая) (Д)
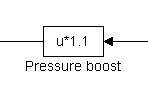
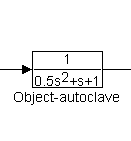
Блок характеристики зависимости увеличения температуры кипения воды (101 кПа – 100С) от давления в автоклаве. Линейная зависимость, на практике такого не бывает, но в данной модели такой характеристики будет достаточно
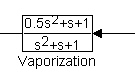
Блок, характеризующий парообразование
В результате выполнения этой части системы происходит автоматический выбор уставки, 100 или 500, если во втором переключателе регистрируется температурная уставка выше 500, то она возвращает значение 500, т.к. для нашего примера будет стоять такая задача. Разбиение на 2 блока с определением уставки необходим для того, что процесс парообразования присутствует даже при температуре, меньше 100С, но он отличен от процесса во время кипения
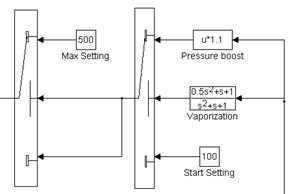
Объект регулирования выбран таким, т.к. любой процесс в природе можно описать математически
А теперь приступим непосредственно к экспериментам. Поставим произвольные коэффициенты
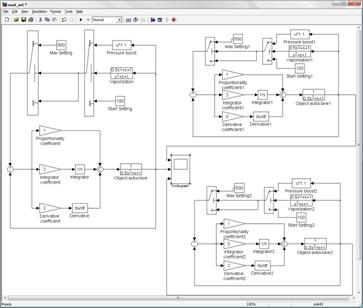
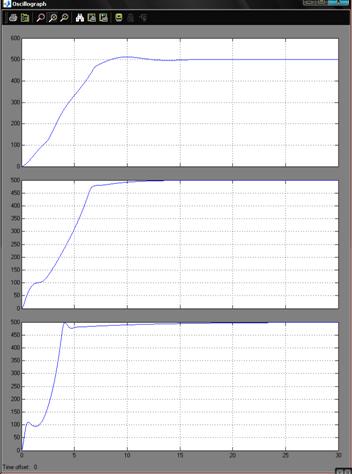
А теперь сделаем наблюдение ПИ-, ПИД- и ПД-регуляторов соответственно. Коэффициенты, равные нулям, отключают составляющие, превращая ПИД в другие виды регульяторов

Рассмотрим изменение выходного сигнала при увеличении И-коэффициента
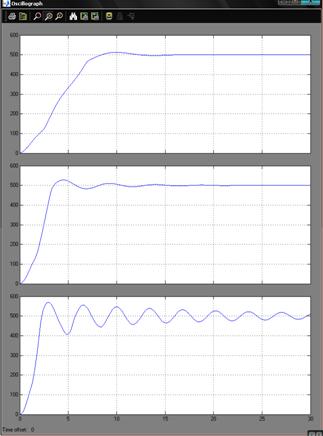
При увеличении Д составляющей, регулятор измеряет коэффициент наклона и увеличивает его на тот коэффициент, который ему задан
П составляющая анализирует отношение выходное к уставке
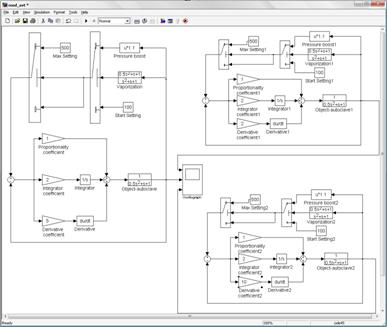
Замена положения в схеме И и Д коэффициентов усиления не приводит ни к чему
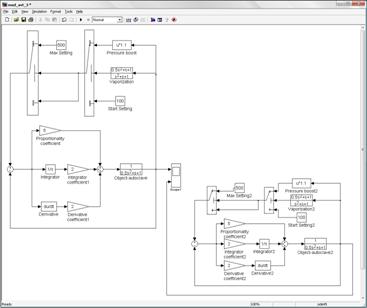
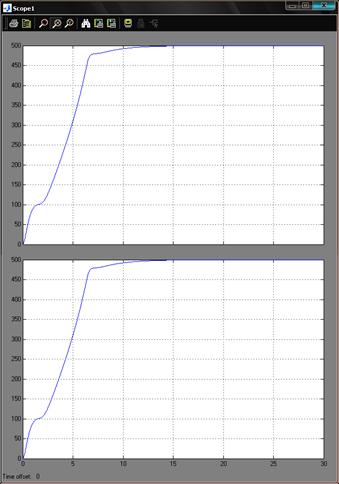
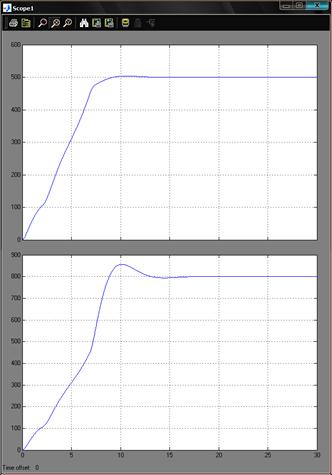
Изменим уставку с 500 на 800. Система также выполняет свои задачи
Заключение
Пропорциональная составляющая является основой регулирующего воздействия для рассмотренного пневматического ПИД-регулятора.
Улучшая временную характеристику переходного процесса, вместе с тем снижаем устойчивость системы автоматического регулирования.
ПИД-регуляторы целесообразно применять в САР с большой инерцией. В качестве примеров таких систем можно назвать:
- бак (емкость), в который для заметного изменение уровня требуется налить или вылить большой объем жидкости;
- теплообменник, в котором внутренний теплообмен протекает медленно и датчик температуры работает с запаздыванием.
Пневматические П-, ПИ-, ПД- и ПИД-регуляторы, в основном, применяются в нефтегазохимической промышленности и в местах с повышенными требованиями к взрывобезопасности и пожарной безопасности.
Для надежной работы пневморегуляторов требуется выдерживать параметры сервисного воздуха, а также проводить регулярное техническое обслуживание, что сопряжено с дополнительными затратами по эксплуатации.
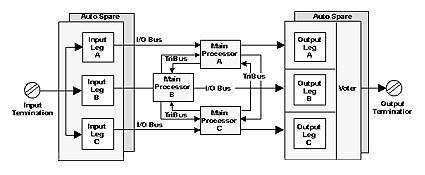
Воплощение различных структурных схем регуляторов значительно упростилось с появлением ПИД-регуляторов на базе микропроцессоров.
Как правило, в таких регуляторах сигнал рассогласования одновременно подается на параллельные ветви, формирующие пропорциональную, интегральную и дифференциальную составляющие, которые затем суммируются и усиливаются. Т.е. каждую ветвь возможно рассматривать как отдельный регулятор. Благодаря независимой работе, интегральная составляющая к концу переходного процесса полностью замещает пропорциональную составляющую.
Несмотря на все многообразие выпускаемых ПИД-регуляторов, принцип их действия остается неизменным.
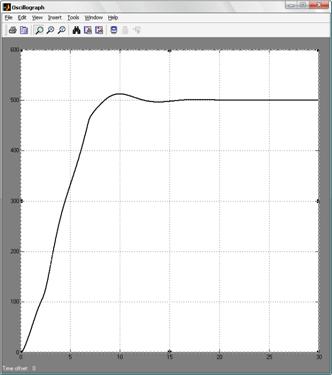
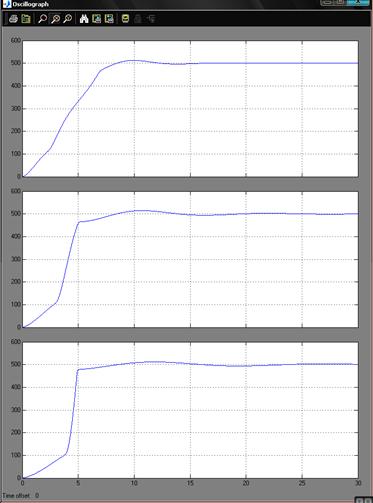
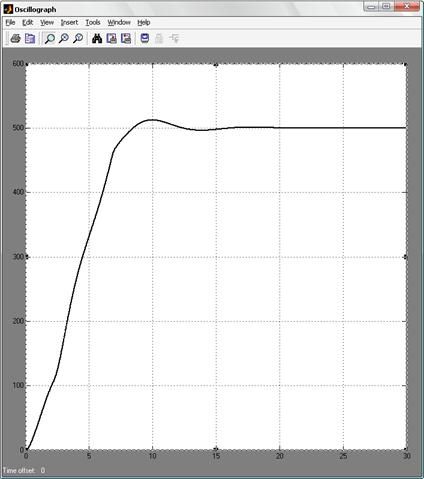
Итогом моделирования автоклава с ПИД-регулятором можно считать показание осциллографа:
Список литературы
1. Щагин А.В. и др. Основы автоматизации техпроцессов. – М.: Высшее образование, 2009. – 163 с.
2. Голоденко Б.А. Имитационное моделирование в среде GPSS: пособие по курсовому проектированию. – Воронеж: МИКТ, 2007. – 112 с.
3. Alex Demyanenko, Control theory. PID Controller, - Copyright © 2007 - 2009
4. Битюков В.К., Волчкевич Л.И., Голоденко Б.А. Автоматизация технологических процессов промышленных производств: учебное пособие. – Воронеж: ВГТА, 2007. – 212 с.
5. Битюков В.К., Голоденко Б.А. Технология. Основные этапы и прогнозы развития: учебное пособие. – Воронеж: ВГТА, 2006. – 264 с.
6. Лазарев Ю. Моделирование процессов и систем в MATLAB. – СПб: Питер, 2005.
Похожие работы
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...

... БИОРЕАКТОРА Лист 90 Доклад. Уважаемые члены государственной экзаменационной комиссии разрешите представить вашему вниманию дипломный проект на тему: «Система автоматизированного управления процесса стерилизации биореактора» Процесс стерилизации биореактора (или ферментера) является важной стадией процесса биосинтеза антибиотика эритромицина. Суть процесса стерилизации состоит в ...
0 комментариев