Навигация
Прецизійний мікропроцесорний вольтметр
27634
знака
2
таблицы
4
изображения
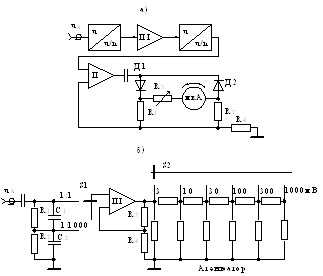
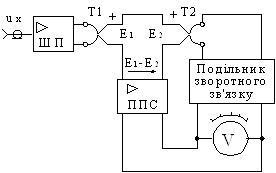
1.2 Прецизійний мікропроцесорний вольтметр .
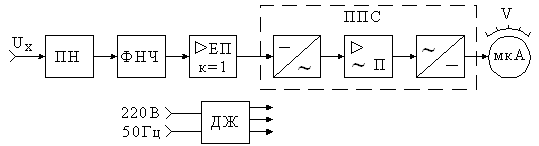
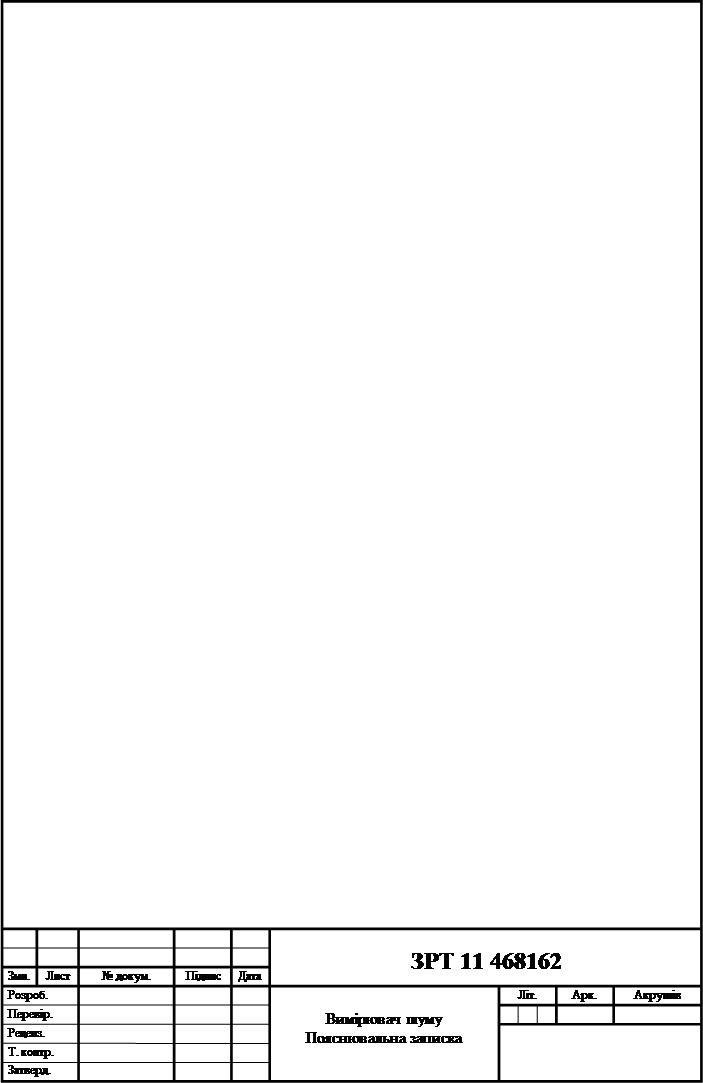
Структурна схема мікропроцесорного вольтметра показана на рис. 1.2.6. Використання МП дозволило вмістити в одному пристрої функції декількох вимірювальних приладів : цифрового вольтметра постійного струму , автоматичного потенціометра ; диференціального компаратора напруги ; вимірювача відношення напруги ; вимірювача потужності ; вимірювача нестабільності . Співвідношення автоматичної корекції похибки з високо лінійним цифро аналоговим перетворювачем , який виконується на основі індуктивних подільників напруги , дозволило досягнути високих метрологічних характеристик . В приладі реалізований компенсаційний метод перетворювача
Мікропроцесор використовується як для виконання функцій управління і обробки вимірювальної інформації, так і для сервісних функцій.
Режими роботи приладу задаються або оператором або дистанційно від зовнішніх пристроїв через інтерфейс типу ЛКП. Мікропроцесор переводить прилад у відповідний режим роботи , який розшифровує стан органів управління . Органи управління мікропроцесорного вольтметра виконані у вигляді перемикачів кнопочних без фіксації стану.
В залежності від вибраної швидкодії (час вимірювання встановлюється 0.1; 1 і 10 с) в приладі передбачено забезпечення чутливості , яка відповідає 4.5 ; 6.5 і 7.5 десятковим розрядам в межах 100 мВ ; 1 В ; 10 В ; 100 В , при цьому вимірювання здійснюється або в два такти , або в три такти , або в три такти з усередненням.
Вхідні наруги через перемикач П поступають на АЦП. В першому такті визначається два старших значущих розрядів. Інформація з виходу АЦП через МП поступає на вхід ЦАП1 . На виході ЦАП1 формується різницевий сигнал , який через перемикач П поступає на вхід АЦП. В другому також відбувається перетворення отриманої різниці в код і визначення двох наступних значущих розрядів . Цей код поступає на ЦАП2. На виході ЦАП2 формується різниця між вихідними напругами ЦАП1 і ЦАП2. Отримана різниця в третьому такті через перемикач П перетворює АЦП в код , який поступає в МП . Мікропроцесор використовується як для управління АЦП і ЦАП, так і для отримання результативного коду. Для підвищення точності в приладі передбачено усереднення від 10 до 100 вимірювань.
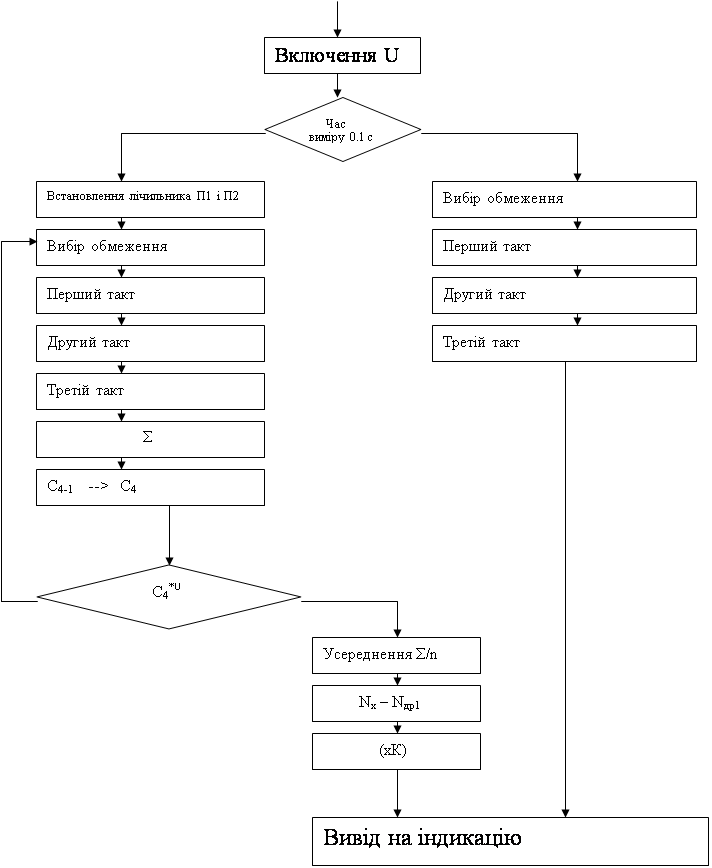
Спрощена структурна схема програми вимірювання показана на рис.1.2.2 . Обчислення Nx – Nдр відповідає проведенню корекції адитивної похибки. Ця операція проводиться в будь-якому режимі вимірювання. При роботі приладу в три такти вимірювання (n1=1) або при роботі з усередненням (n2 = 10...100) , коли необхідно забезпечити відповідно 6.5 і 7.5 десяткових розрядів , передбачена корекція мультиплікативної похибки – операція (ХК).
|
ні так
ні так
2. Опис структурної схеми проектованого пристрою.
Структурна схема – це ряд елементів , кожний з яких можна представити як окремий пристрій , що виконує свої визначені функції.
Розроблений пристрій повинен містити наступні структурні блоки :
1 Вхідний блок. Призначений для перетворення вхідної напруги до нормалізованого , яке можна подавати на вхід схеми АЦП. Крім цього даний блок узгоджує вхідний і вихідний опір схеми.
2 Блок АЦП. З допомогою якого відбувається перетворення значень напруги що поступає з вхідного блоку в код. N - розрядний вихідний код АЦП через буферні схеми подається на системну шину даних (ШД)
3 Блок арифметичних операцій. На даному етапі відбувається обчислення діючого значення напруги. Обчислення СКЗ здійснюється послідовністю арифметичних операцій , що реалізуються формулою :
Uскз = Ö(1/M)SI=1m*U12 (2.1)
Даний блок реалізується в МП програмно
4 ROM (Read Only Memory) – постійна пам’ять , призначена для зберігання коду програм та деяких даних про систему (системних констант). ROM через шинні формувачі під’єднюється до системної шини даних ШД.
5 RAM (Random Access Memory) – необхідна для зберігання оперативних даних , результатів вимірів та ходу програми RAM підєднюється до ШД.
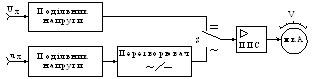
На рис. 2.1 зображена структурна схема пристрою перетворення СКЗ напруги спроектованого на базі МП комплекту.
МП – мікропроцесор;
СУ – сигнали управління;
СІ - системний інтерфейс;
ШУ – шина управління;
ШД – шина даних ;
ША – шина адреса.
3 Алгоритм роботи проектованого пристрою.
1 На вхід пристрою поступає гармонійний сигналU(t) = Umsin(wt +j),
Де Um – амплітудне значення вхідної напруги ;
w - кругова частота w = 2p¦ ;
j - деяка початкова фаза сигналу .
2 Оскільки амплітуда вхідного сигналу лежить в межах 0.001-0.1 В її необхідно підсилити до рівня допустимого вхідного сигналу АЦП. Для цього використовується масштабуючий підсилювач напруги. Використання високочастотних елементів дає підставу знехтувати впливом похибки тракту перетворення напруги в напругу на сумарну похибку приладу.
Послідовне включення операційного підсилювача з 100% зворотнім зв’язком збільшує вхідний опір приладу до десятків МОм , що практично виключає спотворення вхідного сигналу самим пристроєм вимірювання.
3 На АЦП за час tз відбувається перетворення аналогового сигналу в N – розрядний код , який через буферні регістри зчитується по ШД мікропроцесором. Час дискретизації t0 залежить від виду використовуваного АЦП. Кількість розрядів АЦП àN – вибирається з умови забезпечення необхідної точності квантування .
4 Обчислення СКЗ напруги буде проводитись на підставі М вибірок (значень) величини U(t) виміряних протягом одного періоду напруги U(t)
М - кількість вибірок за період Т ;
H – крок інтегрування
За період Т в МП з АЦП поступає М вибірок , які записуються послідовно з RAM.
5 При поступленні М-ої (останньої за період) вибірки МП відключає АЦП від системної ШД і починає обробку прийнятих даних з метою обчислення СКЗ напруги. При цьому МП буде виконувати наступну послідовність дій :
- підсилення значення всіх вибірок до квадрату ;
- сумування квадратів вибірок ;
- ділення суми на кількість вибірок М;
- добування кореня квадратного з діленого.
6 Обчислений результат (діюче значення напруги) зберігається в спеціальній області оперативної памяті.
7 Для здійснення наступного виміру алгоритм починається з пункту 1.
Для обчислення інтеграла можуть використовуватись різні чисельні методи :
а) Метод прямокутників.
б) Метод трапецій :
с) Метод Сімпсона:
4 Розробка апаратної частини.
На даному етапі проектування особливу увагу слід приділити вибору таких основних компонентів пристрою як : АЦП, МП комплект , постійна память , оперативна память.При виборі АЦП основним критерієм буде забезпечення необхідної точності перетворення аналогової величини в код.
Мінімальну кількість розрядів АЦП обчислюють за наступною формулою :
N = I*log2(100/dкб)
Де dкб – середньоквадратична похибка квантування .
В наступному випадку маємо :
N = ]log2(100/0.05)[= 11 ;
Крім необхідної кількості розрядів АЦП повинен мати статичну і динамічну похибки перетворення .
Цим вимогам задовольняє високоточний дванадцятирозрядний АЦП послідовного наближення К 1108 ПВ2
Коротка характеристика мікросхеми К 1108 ПВ2 :
- нелінійність dі = ± 2МР (молодших розрядів) ;
- диференційна нелінійність dді = 1 (МР)
- час дискретизації 2,6 мкс ;
- напруга внутрішнього джерела опорної напруги 2,6 В;
- струми споживання Ісс1 =60 мА ; Ісс2=150 мА.
Центральний МП буде виконувати наступні функції :
1) Управління роботою пристрою;
2) Обробка даних, знятих з АЦП, з метою обчислення СКЗ напруги;
3) Запам’ятовування 2500 попередніх вимірів .
Враховуючи низьку частоту вхідного аналогового сигналу особливих вимог до швидкодії МП не ставиться. Пристрій в цілому повинен характеризуватися по таким параметрам :
а) простотою реалізації ;
б) простотою програмування;
в) дешевизною виконання;
г) малогабаритністю конструкції;
д) можливістю перепрограмування на виконання іншої задачі.
Взявши до уваги вище перелічені вимоги , а також з інших поглядів доцільним бачиться використання МП комплекту КР 580. Центральний процесор на базі МП КР580ИК80А , має 8-розрядну шину даних , 16 – розрядну шину адрес та 5- розрядну шину управління.
Спряження 12-розрядного АЦП та 8 розрядної системної ШД здійснюється за допомогою двох 8-розрядних регістрів памяті КР580ИР82. Таким чином 12- розрядний код АЦП розбивається на 2 слова по 8 біт.
Орієнтований розрахунок об”єму необхідної пам”яті.
В системі необхідно має бути постійна (ROM) та оперативна (RAM) пам”яті.
В ROM зберігається код програми , тому і об”єм постійної памяті і буде визначатись довжиною основної програми та всіх інших підпрограм.
Команди мови Асемблер мають довжину 1-3 байти. Знаючи сумарну кількість команд основної програми MAIN та памяті підпрограм (див розділ 6)
Можна обчислити об”єм необхідної ROM.
ROM=MAIN_LONG*3+SQRT_LONG*3+SUM_LONG*3+POWER_LONG*3+DIVISION_LONG*3+MAKE_SURE_LONG*3
При чому :
MAIN_LONG – кількість команд в основній програмі;
SQRT_LONG – кількість в програмі SQRT;
SUM_LONG – кількість в підпрограмі SUM;
POWER_LONG – кількість в підпрограмі POWER;
DIVISION_LONG – кількість в підпрограмі DIVISION;
MAKE_SURE_LONG – кількість в підпрограмі MAKE_SURE.
Підставивши чисельні значення дістанемо :
ROM=39*3+300*3+20*3+70*3+70*3+30*3=1587 байт
При виборі ВІС памяті ROM необхідно також врахувати те, щоб вона мала 8-розрядну шину даних (для спряження з МП комплектом , КР 580)
Враховуючи вище вказані вимоги до об”єму та способу спряження ROM доцільним є використання постійної памяті на базі ВІС К573РФ8
Коротка характеристика ВІС К573РФ8
- ємність 2048 (2 кБ);
- час вибірки адреси 350 мс;
- струм споживання 100 мА;
- час зберігання інформації при відключеному живленні =2500 год;
- тип корпусу 2121 , 28-8.
Оперативна память (RAM) використовується для тимчасового зберігання проміжних та кінцевих результатів роботи програми , а також для запам’ятовування оперативної інформації (стек).
В даному пристрої в RАM записується 2500 значень вимірів , кожне з яких має довжину 2 байти. Крім цього в оперативну память записується М двохбайтових вибірок (за період Т вхідної напруги U(t)). При частоті дискретизації АЦП Fд=10 кГц і частоті вхідної напруги f=2.0 Гц , маємо М=Fд /f=10/2.0=5
Це число задовільняє співвідношенню теореми Котельникова. Під стек і проміжні результати обчислень виділимо 300 байт . Тоді сумарний об”єм RAM складає :
2500*2+5*2+300=5310 байт
Як і в ROM шина даних RAM повинна мати 8 розрядів. Враховуючи це , а також об”єм RAM будуємо оперативну пам”ять на базі трьох ВІС К537РУ8
Коротка характеристика мікросхеми К537 РУ8.
- має тристабільний вхід, в режимах зберігання і запису керується трьома сигналами
- обмін інформацією відбувається по двохнаправленій шині даних;
- об”єм пам”яті 2048 біт;
- час вибірки 190 мс;
- час звертання 320 мс;
- струм споживання 100 мА
При розрахунку попереднього підсилювача напруги визначимо його коефіцієнт передачі.За еквівалентною схемою складаємо повну матрицю провідностей:
Виключаємо базовий вузол, при цьому скорочена матриця буде мати вигляд:
| Y1 -Y1 0 0 |
| -Y1 Yвх+Y1+Yc -Yвх 0 |
Y= | 0 -Yвх Y2+Y3+Yвх+Yc -Y2 |
| 0 -кYвих kYвих –Y2 Y2+Yвих |
Коефіцієнт передачі по напрузі як і в попередньому випадку визначається з рівнянняК14 =D14/D11;
| -Y1 Yвх+Y1+Yc -Yвх |
D14= | 0 -Yвх Y2+Y3+Yвх+Yc | = kYвих(Y2+Y3)Y1
| 0 -кYвих kYвих – Y2 |
| Yвх +Y1 +Yс -Yвх 0 |
D11 = | -Yвх Y2+Y3+Yвх+Yс -Y2 |=
| - кYвих kYвих– Y2 Y2+Yвих|
=Y1(Y2+Y3)Yвих+Y2Y1(kYвих-Y2)=kYвихY2Y1
K14=(kYвих(Y2+Y3)Y1)/(kYвихY2Y1) = 1+(R2/R3)
В якості операційного підсилювача вибираємо мікросхему К140УД1В
Задаємо значення R1=10кОм.
Тоді
R2=kR3-R3
Так як коефіцієнт передачі по напрузі даного підсилювача повинен бути рівним 50 то
R2=50*10*103 – 10*103 = 490 kOm
Оскільки в номінальному ряді опорів немає такого номіналу , то набираємо R2 з двох опорів
R2=R2¢+R2¢¢ R2¢=470 kOm i R2¢¢=39 kOm,
Причому R2¢¢ буде змінним опором.
Похожие работы
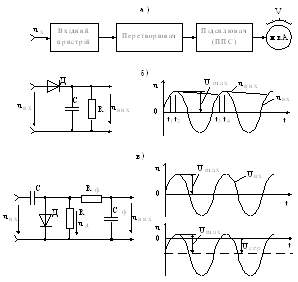
... за схемою перетворювач-підсилювач (рис. 6.31,а). Функції перетворювача змінної напруги в постійну виконують амплітудні детектори з відкритим входом, закритим входом та їх комбінації. Рис. 6.31. Електронний вольтметр максимальних значень: а - структурна схема; б, в - принципові схеми і часові діаграми детекторів з відкритим і закритим входом відповідно Детектор з відкритим входом (рис. ...
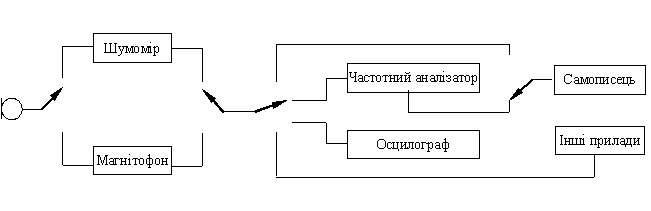
... 3.1 Частотні виправлення до показань шумоміра Номер октавної смуги Середня частота октавної смуги, Гц Відносний рівень спектра в смузі, дБ Середнє виправлення до показання шумоміра в межах октавної смуги, дБ Корегований рівень спектра, дБ 1 63 50 +8 58 2 125 50 +4 54 3 250 53 + 2 55 4 500 56 + 1 57 5 1000 59 —1 58 6 2000 62 +2 64 7 4000 40 +4 ...
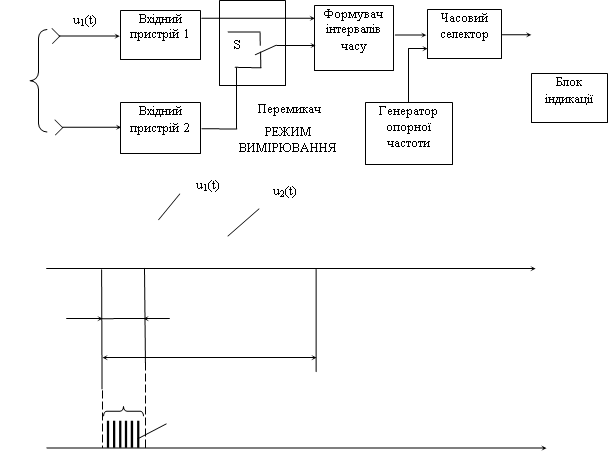
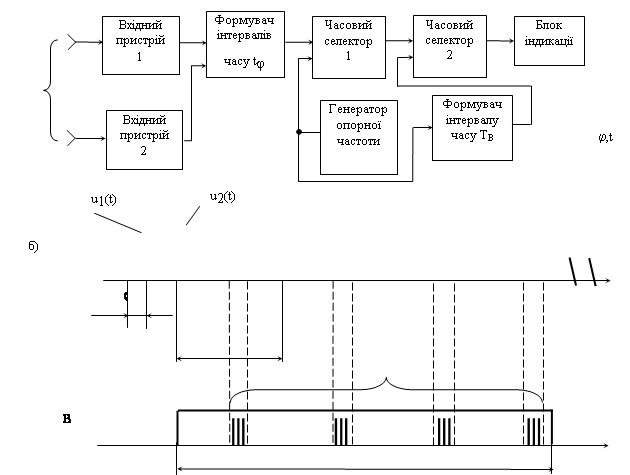
... .7.16, б, в). Пакети імпульсів з виходу часового селектора 1 надходять до часового селектора 2, який відкривається формувачем інтервалу часу на певний вимірювальний час (звідки ще одна назва таких фазометрів - цифрові фазометри з постійним вимірювальним часом). За час через відкритий селектор 2 в блок індикації надходить m пакетів по імпульсів кожен (рис.7.16, в), причому . Сумарна кількість ...
0 комментариев