Навигация
Разомкнутые системы управления
32347
знаков
0
таблиц
30
изображений
РАЗОМКНУТАЯ СУЭП

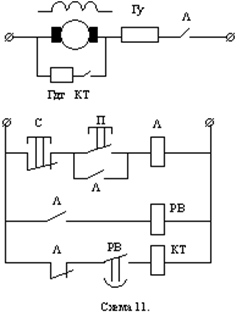
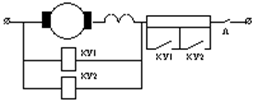
Нажимаем кнопку С Þ откл. L Þ нормально замкнутые блокконтакты L подключают РV параллельно якорю ДПТ, ЭДС которого достаточна для включения РV Þ включается контактор КТ, начинается режим динамического торможения. При уменьшении скорости ДПТ ЭДС достигает уровня отпускания РV, Uотп = (0,1 ¸ 0,2)Uн, что соответствует скорости w » (0,1 ¸ 0,2)wн. Þ отключается КТ. Нормально разомкнутые контакты контакторов КТ и L обеспечивают цепь питания катушки электромагнитного тормоза ЭМ Þ накладываются механические тормоза.
Типовые узлы схем автоматического управления ад


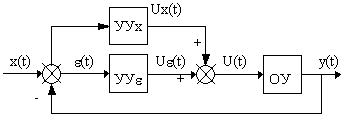
РАЗОМКНУТАЯ СУЭП (или система без О.С.)- это система, в которой управление u(t) формируется в зависимости только от внешних воздействий: u(t) = j[x(t), f(t)].
Применение разомкнутых АСУЭП:
1. Обеспечение определенной последовательности управления ЭП.
2. Пуск с ограничением момента (в резистивных ЭП).
3. Регуляторы скорости с малым диапазоном регулирования.
4. Стабилизаторы скорости (с каналом компенсации возмущения).
Функциональная схема разомкнутой СУ представлена на рис. 6.1.
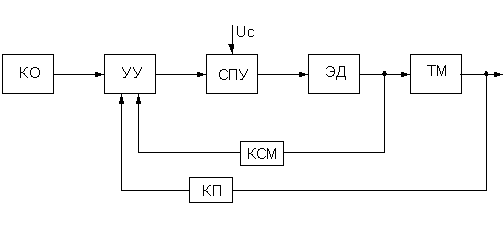
Рис. 6.1.
КО - командный орган;
УУ - устройство управления;
СПУ - силовое переключающее устройство;
ТМ - технологичный механизм;
КСМ - контроль скорости и момента;
КП - контроль положения.
Подключение двигателя ЭД к сети обеспечивается СПУ, получающего команды от УУ.
КО обеспечивает подачу команд на пуск-торможение-реверс-останов. Устройства КСМ и КП обеспечивают контроль координат ЭП. В системах без ограничения момента (тока) формирование переходных процессов не предусматривается. Такие СУ типичны для АД с к.з. ротором, маломощных ДПТ.
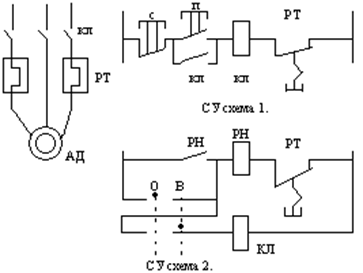
Наиболее просто СУ реализуется для короткозамкнутого АД: после подачи команды на пуск осуществляется прямое включение АД на полное напряжение сети (рис. 6.2.).
Используется для построения СУ первой группы ЭП электроаппараты (контактные и бесконтактные) релейного действия.
Для включения и отключения силовых цепей применяют электромагнитные контакторы, пускатели, статические (тиристорные) переключатели. Для подачи командных сигналов - командоаппараты: кнопки Пуск, Стоп (СУ рис.6.2, схема 1), командоконтроллеры (СУ Рис.6.2, схема 2), путевые и конечные выключатели, датчики давления, температуры и других технологических параметров.
В СУ схеме для подачи напряжения в схему управления необходимо командоконтроллер установить в положении "О", при этом включаем РН и ставится на самопитание через свои нормально разомкнутые контакты РН. При перерыве в энергоснабжении при работе ЭП повторное включение ЭД возможно после установления К\К в положение "О".
Большое место в СУЭП занимают резисторные ЭП без регулирования скорости ,т.е. работающие с постоянной установившейся скоростью (АД с ф.р., ДПТ средней мощности (>7кВт)).Резисторные СУЭП обеспечивают динамические и статические режимы работы. Ступенчатое переключение резисторов, реакторов или других элементов в силовых цепях ЭД обеспечивает возможность ограничения момента (тока) в определенных пределах.
Количество ступеней определяет точность стабилизации момента при пуске или торможении, или обеспечивает требуемый момент в переходных режимах.
Управление производится автоматическим отключением резисторов через определенные промежутки времени ![]() t1,
t1,![]() t2, ... ,
t2, ... ,![]() tn, при достижении определенной скорости w или определенной величине тока I т.п. (рис.6.3).
tn, при достижении определенной скорости w или определенной величине тока I т.п. (рис.6.3).
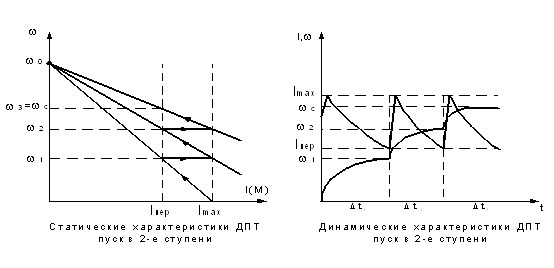
Рис. 6.3.
Таким образом, управление пуском в принципе может быть осуществлено:
- в функции времени;
- в функции скорости;
- в функции тока;
- в функции ЭДС;
- в функции пути.
Управление в функции времени f(t) предполагает, что в СУ есть аппараты, контролирующие время, т.е. реле времени, настраиваемые на отсчет определенных, наперед заданных выдержек времени. Каждое реле включает соответствующий контактор ускорения, силовой контакт которого закорачивает нужную ступень пускового сопротивления.
Для линейных механических характеристик двигателя при Мс=const время разгона привода на i- й ступени пуска:
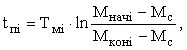
где  - электромеханическая постоянная времени привода на i- й ступени;
- электромеханическая постоянная времени привода на i- й ступени;
wначi, wконi, Мначi, Мконi,- начальные и конечные значения скорости и момента двигателя на i- й ступени;
J- момент инерции привода, приведенный к валу двигателя.
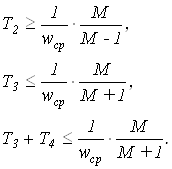
Время торможения определяется из условия:
Выдержка реле времени определяется с учетом собственного времени включения (отключения) контактора:
![]()
Управление в функции скорости производится при помощи реле, контролирующих скорость двигателя непосредственно или косвенно.
При достижении заданного значения скорости соответствующее реле выдает команду на включение контактора ускорения. Наиболее употребительны косвенные способы, в которых используются величины, пропорциональные скорости двигателя: ЭДС якоря (для ДПТ), ЭДС или частоту тока ротора (для АД с фазным ротором и СД). В этих случаях говорят об управлении в функции ЭДС или частоты.
Управление в функции тока реализуется применением реле минимального тока. Эти реле включают контактор ускорения при снижении пускового тока до значения тока переключения.
Типовые узлы схем автоматического управления ДПТ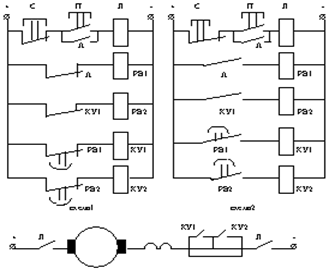
а) Управление пуском в функции времени.
Различают схемы с управление от кнопок и от командоконтроллеров. В зависимости от применяемых реле времени (РВ) различают схемы, в которых выдержка времени отсчитывается при подаче напряжения на катушку управления РВ (пневматические реле), и при обесточивании катушки управления РВ (электромагнитные реле). Катушки управления последних должны быть предварительно под напряжением. Поэтому, рассматривая работу схемы, необходимо определить состояние аппаратов (включены - отключены) перед подачей команды "Пуск".
Управление пуском ДПТ может осуществляться по схеме управления 1 или 2. (рис. 6.4)
Схема 1: В исходном состоянии РВ1 и РВ2 включены, их нормально замкнутые контакты в цепи катушек КУ1 КУ2 разомкнуты. При нажатии кнопки "Пуск" включается линейный контактор L, через силовые контакты которого подключается ДПТ к сети; начинается пуск ДПТ на первой пусковой ступени при полностью введенных пусковых резисторах. Одновременно обесточивается катушка РВ1 (разрываются блокконтакты L).
По истечении выдержки времени Dt1 электромагнитное реле времени РВ1 замыкает нормально замкнутые контакты в цепи контактора ускорения КУ1, включается КУ1 и силовыми контактами закорачивает часть пускового резистора. Одновременно нормально замкнутые блокконтакты КУ1 разрывают цепь питания катушки РВ2. Начинается отсчет выдержки времени разгона на второй пусковой ступени Dt2, по истечении которого замыкаются нормально замкнутые контакты РВ2, включается контактор КУ2, силовые контакты которого закорачивают оставшуюся часть пускового резистора. ДПТ выходит на разгон по естественной характеристике.
Схема 2; В исходном состоянии все аппараты обесточены. Нажимаем кнопку П Þ включаются L и РВ1 Þ начинается отсчет времени разгона на первой пусковой ступени, по истечении которого замыкаются нормально разомкнутые контакты РВ1, включаются КУ1 и РВ2, начинается отсчет времени разгона на второй пусковой ступени, по истечении которого замыкаются нормально разомкнутые контакты РВ2, включается КУ2 Þ разгон на естественной характеристике ДПТ.
б)Управление пуском в функции скорости (ЭДС).
![]()
Схема 1
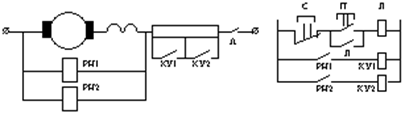
Схема 2
Рис. 6.5.
Схемы могут быть собраны на контакторах управления, подключенных параллельно якорю ДПТ и имеющих разное (схема 1) или одинаковое напряжение включения, или же с использованием промежуточных реле напряжений РН1 включаем параллельно якорю ДПТ (схема 2), и управляющих включением контакторов ускорения КУ. (рис. 6.5).
Напряжение включения аппаратов, подключенных параллельно якорю двигателя, пропорционально ЭДС, а следовательно, скорости ДПТ, при достижении определенного значения которой происходит закорачивание очередной части пусковых резисторов. Эти схемы получили малое распространение и применяются только для простых схем (2- 3 ступени) из-за нестабильности настройки (зависимость от напряжения сети, нагрузки и др.).
в) Управление пуском в функции тока
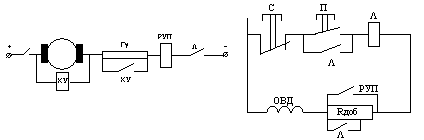
Рис. 6.6: пуск ДПТ в два этапа: разгон при номинальном потоке возбуждения в функции ЭДС и разгон на скорость выше номинальной при ослаблении магнитного потока - управление в функции тока.
РУП - реле управления полем, представляющее собой реле минимального тока. Нажимаем кнопку П Þ включается L, начинается разгон в две ступени до wн1 управление в функции ЭДС под контролем КУ, включенного параллельно якорю ДПТ. При разгоне ток всегда больше Iном, поэтому нормально разомкнутые контакты РУП замкнут, что обеспечивает Фном ДПТ (закорочен Rдоб в цепи ОВД).
После разгона ДПТ до wном при небольшом Мс < Мном ток в якорной цепи I уменьшается до значения, при котором отпадает якорь реле РУП, представляющем собой реле минимального тока. Нормально разомкнутые контакты РУП размыкаются, уменьшается ток возбуждения ДПТ. Если Мс возрастет, ток может достичь тока включения РУП - магнитный поток увеличится до Фн.
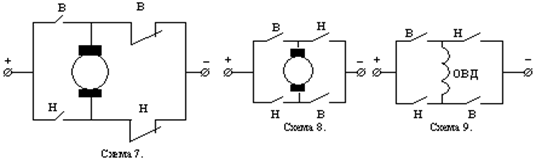
г) Торможение и реверс ДПТ
|
![]()
![]() Для маломощных ДПТ (до 1 кВт) НВ можно применить (рис. 6.7 - а), обеспечивающую реверс и динамическое торможение при отключении.
Для маломощных ДПТ (до 1 кВт) НВ можно применить (рис. 6.7 - а), обеспечивающую реверс и динамическое торможение при отключении.
Для ДПТ средней и большой мощности используют реверсоры тока якоря или тока возбуждения с двойным разрывом электрической цепи ( рис. 6.7 – б,в).
В - контакторы, обеспечивающие вращение "вперед";
Н - контакторы, обеспечивающие вращение "назад".
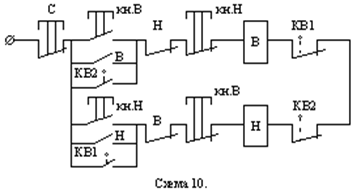
Управление реверсорами может быть с помощью реверсивных кнопок В и Н, а в автоматическом режиме- с помощью концевых выключателей КВ1 и КВ2 (рис. 6.7 – г) :
При нажатии кнопки В включается контактор В. Для реверса нажимаем кнопку Н, при этом размыкается цепь катушки контактора В, при отключении которого замыкается нормально замкнутый контакт В в цепи питания контактора Н и включается контактор Н. Нормально замкнутые контакты контакторов В и Н представляют собой электрическую блокировку на предотвращения аварийного режима при залипании магнитной системы отключаемого контактора. В автоматическом режиме отключение работающего контактора и включение реверсивного осуществляется переключением КВ1 и КВ2.
д) автоматическое управление торможением ДПТ в функции времени
|
В исходном состоянии все аппараты отключены. Нажимаем кнопку П Þ включается L Þ разгон ДПТ. Нормально разомкнутые блокконтакты L включают реле времени электромагнитного типа РВ, подготавливая его к работе, также сразу замыкаются нормально разомкнутые контакты РВ в цепи катушки КТ. Нажимаем кнопку С Þ отключается L, отключая ДПТ от сети. Нормально разомкнутые блокконтакты L размыкаются, обесточивая РВ, а нормально замкнутые контакты L в цепи катушки контактора торможения КТ включает КТ, силовой контакт которого замыкает цепь динамического торможения ДПТ. Время торможения определяется выдержкой времени реле РВ, по истечении которого все аппараты - в исходное состояние.
е) автоматическое управление торможением в функции скорости (ЭДС)
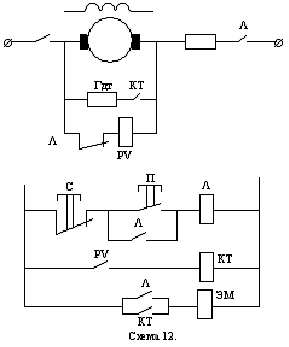
В качестве датчика скорости используют реле напряжения РЭВ 830 с низким коэффициентом возврата (напряжение отключения (0,1 ¸ 0,2) Uн). В исходном состоянии - все аппараты отключены. (рис. 6.9.)
Нажимаем кнопку П Þ вкл. L, силовые контакты которого подключают якорь ДПТ через пусковые резисторы к сети, а нормально замкнутые блокконтакты L размыкают цепь питания реле РV.
|
Типовые узлы схем автоматического управления ад
При пуске АД с фазным ротором пусковые токи ограничиваются резисторами, включенными в цепь ротора. Обмотка статора подключается контактором на полное напряжение сети. Отключение ступеней пускового резистора производится замыканием контактов контакторов ускорения КУ (схема 14). Число ступеней пускового резистора выбирается в зависимости от требований поддержания постоянства Мпуск АД и от Мс статической нагрузки.
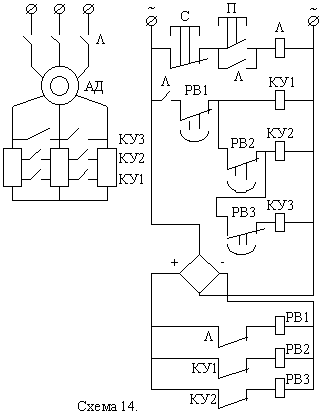
Команды на пуск и остановку АД подаются кнопками управления или другими командными устройствами. Управление моментом АД с фазным ротором при пуске осуществляется по программе в функции времени. Схемы в основном соответствуют схемам управления ДПТ, но могут выполняться на аппаратах переменного тока. При большой частоте включения схемы выполняются на аппаратах постоянного тока. В схеме (рис. 6.10) применяют силовые аппараты- контакторы линейный L и ускорения КУ1- КУ3 на переменном токе, а в качестве элементов контроля времени- электромагнитные реле времени постоянного тока серии РЭВ 810 или РЭВ 80. Схема работает аналогично схеме управления в функции времени ДПТ.
В исходном состоянии (до нажатия кнопки Пуск) находятся под напряжением обмотки реле РВ1, РВ2 и РВ3. Их нормально замкнутые контакты цепях управления контакторами ускорения разомкнуты. При нажатии кнопки П включается контактор L, через силовые контакты которого статорная обмотка АД подключается к сети. Одновременно с этим обесточивается обмотка РВ1 нормально замкнутыми блокконтактами контактора L. Начинается отсчет выдержки времени разгона АД на первой пусковой ступени с полностью введенными в цепь ротора пусковыми резисторами. По истечении установленной выдержки времени замыкаются нормально замкнутые контакты РВ1, включается контактор КУ1 и своими силовыми контактами КУ1 закорачивает часть пускового резистора, а блокконтактами КУ1- обесточивает реле времени РВ2. Начинается отсчет времени на второй пусковой ступени. При замыкании нормально замкнутых контактов РВ2- включается КУ2, обесточивается РВ3- начинается разгон на третьей пусковой ступени. При замыкании нормально замкнутых контактов РВ3- включается КУ3, АД выходит на разгон при полностью закороченных пусковых резисторах.
Автоматическое управление торможением АД осуществляют в функции времени или в функции скорости.
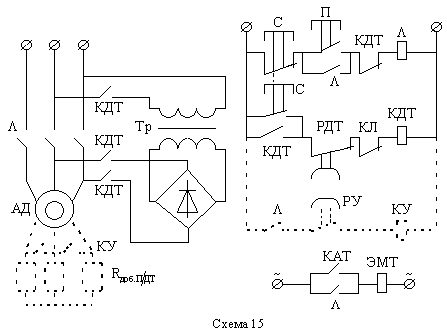
На рис. 6.11 представлена схема узла, обеспечивающего динамическое торможение АД с управлением в функции времени.
Узел применяют при отсутствии сети постоянного тока, поэтому обмотка статора АД питается через выпрямитель с трансформатором Тр. В схеме используют аппараты переменного тока. Реле времени РДТ - маятниковое, пристроенное к контактору динамического торможения КДТ.
У АД с фазным ротором при торможении в цепь ротора вводится добавочное сопротивление Rдоб.ДТ, обычно равное сопротивлению пускового реостата Rдоб.П (на схеме реостат показан в виде одной ступени, управляемой контактором КУ и реле времени РУ- штриховые линии. РУ - маятниковое, пристроенное к линейному контактору L).
Пуск: В исходном состоянии до нажатия кнопки П все аппараты обесточены. При нажатии кнопки П включается линейный контактор L и запускается маятниковое реле отсчета выдержки времени РУ разгона АД с фазным ротором на первой пусковой ступени с веденным реостатом Rдоб.П. После замыкания нормально разомкнутых контактов КУ АД выходит на разгон по естественной характеристике.
Д.Т. : При нажатии кнопки С (стоп) отключаются контакторы L и КУ, и вводится в цепь ротора Rдоб.ДТ (для АД с ф.р.). Замыкающий контакт кнопки С подготавивает цепь включения контактора КДТ, при срабатывании КДТ постоянное напряжение подается к двум фазам статорной обмотки АД и начинается динамическое торможение (ДТ). При включении КДТ запускается РДТ, которое, отсчитав выдержку времени, установленную для динамического торможения, отключает своими контактами контактор КДТ. При отключении обоих контакторов L и КДТ накладываются механические тормоза ЭТМ.
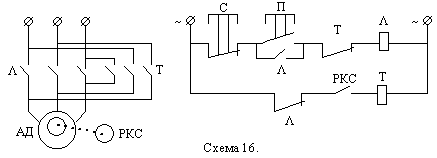
Автоматическое управление торможением противовключением АД осуществляется в функции скорости.
РКС - индукционное реле контроля скорости .
При нажатии кнопки П включается контактор L и пускается АД, статорная обмотка которого подключается к сети через силовые контакты L. РКС замыкает свои нормально разомкнутые контакты в цепи катушки контактора противовключения Т, подготавливая его к включению. При нажатии кнопки С контактор L отключается и замыкается цепь питания катушки контактора Т. Начинается режим торможения противовключением. При скорости, близкой к нулю, контакт РКС размыкается и отключает контактор Т. При помощи РКС можно также управлять динамическим торможением АД с к.з. и фазным ротором. Схема соответствующего узла аналогична схеме рис 6.11, где вместо реле РДТ в цепи управления нужно включить размыкающий контакт реле РКС.
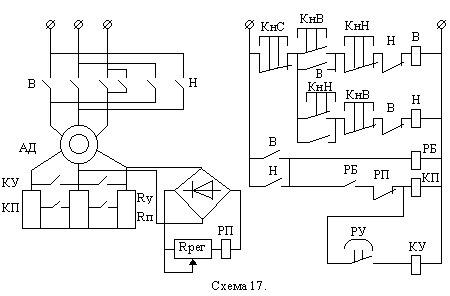
Рис. 6.13 представляет собой узел, реализующий управление торможением противовключением АД с ф.р.
В этой схеме используют косвенный метод контроля скорости АД посредством реле напряжения РП постоянного тока, катушка которого подключена через выпрямитель к контактным кольцам обмотки ротора.
Напряжение на катушке РП пропорционально скольжению S двигателя:
UПР » Е2К S где Е2К- линейная ЭДС ротора при S = 1.
РП настраивается с помощью регулировочного реостата Rрег так, чтобы оно срабатывало в начале процесса торможения противовключением АД, т.е. при S=2, и отпускало свой якорь при напряжении, соответствующем S=1, т.е. нулевой скорости. При пуске РП не включается. Схема работает таким образом, что пусковой ток ограничивается только реостатом ускорения Rу, а при торможении противовключением в цепь ротора вводятся дополнительно сопротивление Rп.
Работа схемы при пуске АД : При нажатии кнопки В включается контактор В, подключается статорная обмотка АД к сети, включается РБ и сразу за ним КП, что обеспечивает пуск при введенном Rу и закороченном Rп. Пуск производится в две ступени под контролем реле времени маятникового типа РУ (установлено в контакторе КП). После срабатывания КП начинается отсчет выдержки времени для разгона на первой пусковой ступени, по истечении которой через нормально разомкнутые контакты РУ включается контактор ускорения КУ.
Работа схемы при реверсе АД : Нажимаем кнопку Н, отключаем контактор В, КП, КУ и РБ. После замыкания нормально замкнутых контактов контактора В в цепи катушки контактора Н (электрическая блокировка), включаем контактор Н, начинается электрическое торможение противовключением АД. При этом в роторной цепи АД включены все резисторы (Rу + Rп), т.к. реле РП сработало и блокировало включение контактора КП. При скорости ротора, близкой к 0, отпадает якорь РП и замыкает свой нормально замкнутый контакт в цепи питания КП, при срабатывании которого закорачивается Rп в цепи ротора АД. Начинается разгон АД в обратном направлении с введенным реостатом Rу под контролем реле времени РУ (смотреть работу схемы при пуске). При нажатии кнопки С АД отключается от сети и тормозится только под действием статического момента.
Управление в функции тока может применяться при пуске и торможении противовключением АД с фазным ротором. Для реализации этого принципа применяют, как и для ДПТ, реле минимального тока, которое дает команду на очередное переключение реостатов при падении пускового тока ниже тока отпускания якоря реле.
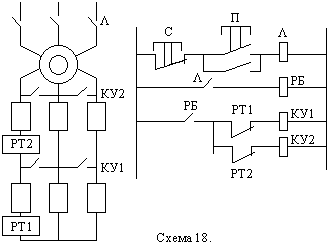
Пуск АД в функции тока
Для каждой ступени пусковых реостатов используется свое реле минимального тока РТ1 и РТ2. Первым должно при пуске АД сработать РТ1, поэтому ток отпускания ![]()
Реле блокировки РБ служит для исключения ложного срабатывания контакторов ускорения КУ1 и КУ2 до пуска АД при подаче напряжения в схему управления. При этом время срабатывания РБ должно быть больше времени включения реле тока РТ1 и РТ2, т.е. при пуске к моменту замыкания нормально разомкнутых контактов РБ нормально замкнутые контакты РТ1 и РТ2 должны успеть разомкнуться.
При управлении торможением противовключением АД с ф.р. в функции тока при падении тока в роторной цепи в схему управления подается команда от РТ1 на отключение первой ступени реостатов ограничения тока ротора.
Типовые узлы схем ау синхронным двигателемПуск СД осуществляется в три этапа:
1. Разгон до подсинхронной скорости (0,7 wо).
Похожие работы
... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...
... при которых работа ЭП удовлетворяет требования техпроцесса. Основное требование к системе управления - обеспечение допустимого значения ошибки управления e(t) = х(t)-y(t) в установившихся и переходных режимах, что определяется статическими и динамическими характеристиками САУ ЭП. Статическая характеристика замкнутой СУЭП - зависимость регулируемой переменной от основного возмущающего воздействия ...
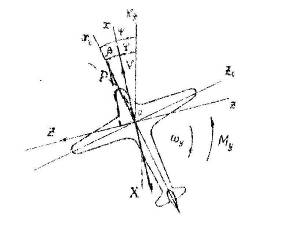
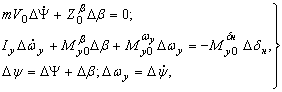
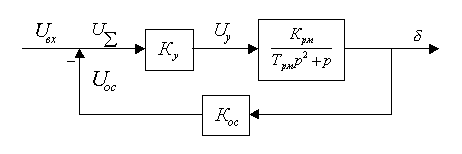
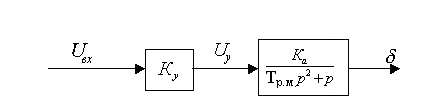
... рулевого привода, т. е. увеличивает его быстродействие. Частота собственных колебаний рулевого привода должна быть примерно на порядок выше частоты угловых колебаний ЛА. 5 Синтез системы Составим структурную схему разомкнутой системы рулевого привода с жесткой обратной связью и определим значения коэффициентов. Структурная схема разомкнутой системы рулевого привода показана на рис 1: ...
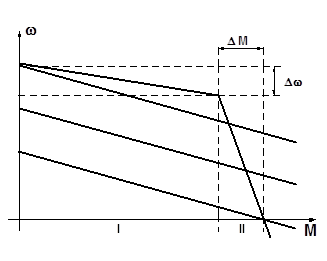
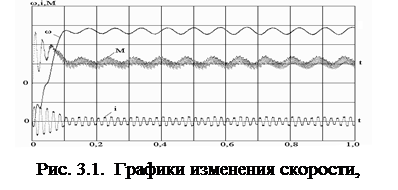
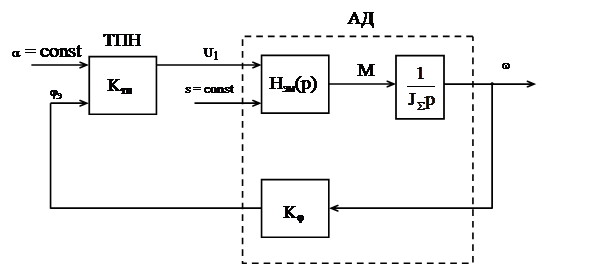
... больших колебаний (рис 3.2). В данном случае скорость двигателя может превысить синхронную, а область колебаний охватывает первый и второй квадранты. 2. Методика исследования устойчивости разомкнутой системы электропривода ТПН-АД Динамические свойства асинхронных двигателей. Реальные переходные процессы асинхронного электропривода сопровождаются изменением скорости двигателя. Однако, в ряде ...
0 комментариев