Проектно-пояснительный раздел
Выбор и техническое описание вторичного преобразователя
Разработка программно-аппаратного комплекса
Структура программного обеспечения распределённой ИИС
Структура управляющей программы микроконтроллера
Разработка серверного приложения
Технико-экономическое обоснование
Расходы на материалы
Расходы по арендной плате за помещения
Расчет экономической эффективности разрабатываемой системы
Требования к естественному и искусственному освещению
Навигация
Разработка программно-аппаратного комплекса
Автоматизированная система мониторинга расхода топлива
61709
знаков
6
таблиц
24
изображения
2. Разработка программно-аппаратного комплекса
2.1 Проект распределённой измерительной системы
Концепция предлагаемого технического решения состоит в максимальном использовании типовых электронных узлов со стандартными входными и выходными характеристиками.
Это позволит избежать перечисленных выше недостатков и открыть возможности для дальнейшего расширения функциональных возможностей и повышения надёжности системы.
Для определения уровня топлива используется емкостной датчик (например, Е 25ХИ) в комплекте со вторичным преобразователем ИСУ100И. Указанное оборудование имеет разрешение Ростехнадзора на применение и может использоваться на пожароопасных объектах (каковым является топливный бак).
Преобразователь ИСУ100И имеет релейные выходы для контроля крайних значений уровня (на схеме показана светодиодная индикация «Ёмкость полна» и «Ёмкость пуста»). Это позволяет капитану судна получать информацию о критических значениях уровня топлива даже при выходе из строя контроллера и/или компьютера.
Для измерения частоты вращения предлагается использовать наиболее простые и надёжные индуктивные датчики.
Обработка информации, получаемой с датчиков, осуществляется промышленным контроллером типа M90-19-1A, который встроенные аналого-цифровой преобразователь (для обработки сигнала уровня топлива) и часы реального времени (для определения частоты вращения).
Передачу информации с контроллера в офис Компании на первом этапе предлагается выполнять по существующему механизму.
Кроме этого, предлагается задействовать возможность сопряжения контроллера типа M90-19-1A с GSM-модемом. Это позволит получать информацию и осуществлять удалённое управление системой посредством СМС-сообщений в то время, пока судно находится в зоне покрытия сотовых сетей (например, при стоянке в портах, прохождении мимо крупных населённых пунктов и т.п.).
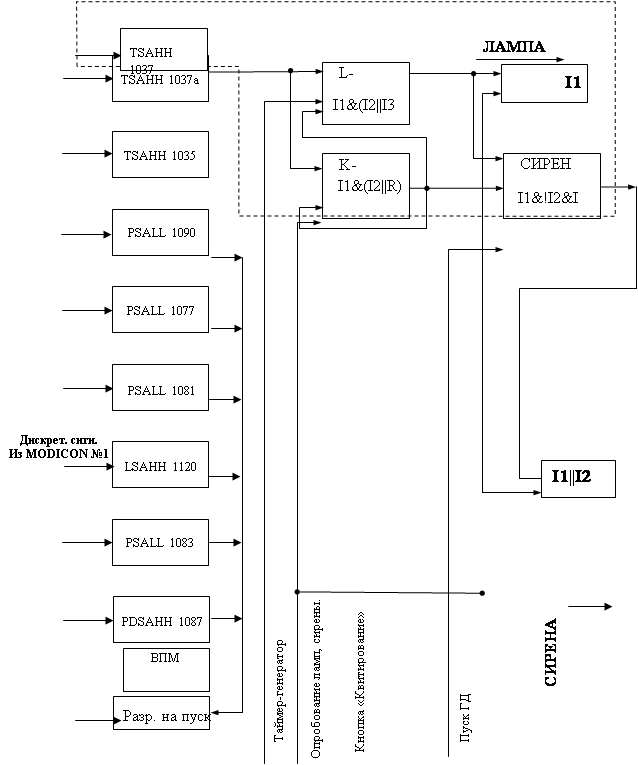
На рисунке 2.1 приведена общая схема организации распределённой измерительной системы.
В машинном отделении монтируется датчику уровня и вторичный преобразователь уровня. Датчик уровня размещается в цистерне, причём его чувствительный элемент монтируется в перфорированной трубе. Вторичный преобразователь крепится на специальной металлической площадке, приваренной к стене машинного отделения.
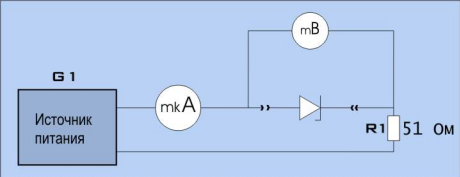
Выход вторичного преобразователя подключается к аналоговому входу микроконтроллера. Для соединения вторичного преобразователя и контроллера используется трехжильный провод. Две жилы – для питания, третья – для передачи токового сигнала.
Датчики оборотов двигателей представляют собой нормально разомкнутые магнитные размыкатели, основанные на эффекте Холла. Датчики крепятся в непосредственной близости от валов двигателей. На валы двигателей, строго напротив датчиков, с помощью клея крепятся магниты.
Выходы датчиков подключаются к дискретным входам контроллера. На каждый датчик подаётся постоянное напряжение питания. Поэтому в обычном состоянии на вход контроллера подступает постоянное напряжения питания 24 В, что соответствует логической единице.
В момент прохождения магнита мимо датчика происходит размыкание питающей цепи, что вызывает падение напряжения на дискретном входе контроллера. Это воспринимается контроллером как смена сигнала из логической единицы на логический ноль, что соответствует одному обороту вала.
Для сигнализации о переполнении топливной цистерны, и также о низком уровне топлива, используются релейные выходы вторичного преобразователя. Через них подключаются световые и звуковые сигнализаторы уровня.
В блоке управления вторичного преобразователя программируются две метки: верхняя и нижняя. При достижении уровня топлива, соответствующего верхней метке, происходит срабатывание первого реле. Аналогично работа организована с нижней меткой.
Выходной сигнал вторичного преобразователя уровня стандартизирован и нормирован. Для токовых сигналов (которые используются во взрывобезопасных приложениях) существует два диапазона нормирования: 0..20 мА или 4..20 мА. Большинство типов промышленного контрольно-измерительного оборудования поддерживает указанные диапазоны сигналов.
Диапазон 0..20 позволяет более точно провести передачу сигнала, поскольку диапазон изменения больше. Нужный диапазон задаётся непосредственно на вторичном преобразователе.
Контроллер производит оцифровку значения тока на аналоговом входе и вычисление уровня топлива.
Данные передаются в компьютер через последовательный порт, где с ними производится дальнейшая обработка. Алгоритмы обработки и структура программного обеспечения будут рассмотрены ниже.
Постоянная связь системы с диспетчерским пультом поддерживается с помощью терминала спутниковой системы Inmarsat. Терминал подключается в ПЭВМ также через последовательный порт. Управление сеансами связи производится программным модулем, работающим на ПЭВМ капитана судна.
Этот программный модуль осуществляет в автоматическом режиме оптравку значения уровня топлива и частот вращения валов двигателей на диспетчерский пульт.
Кроме этого, спутниковый терминал позволяет получать GPS-информацию: координаты судна, скорость, направление движения.
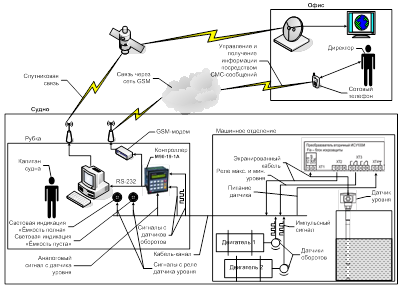
Рисунок 2.1 - Общая схема организации распределённой измерительной системы
Используемый в системе промышленный контроллер поддерживает передачу SMS-сообщений через GSM-модем.
Посредством SMS-сообщений контроллер также может в автоматическом режиме передавать указанные выше данные, не используя спутниковую связь. Использование альтернативного канала позволяет экономить денежные средства, поскольку трафик, проходящий через спутниковую систему значительно дороже, чем трафик через наземные GSM-станции.
Однако, GSM-канал ограничен в использовании, поскольку часть времени судно находится вне покрытия сотовых сетей. Вместе с этим, логика работы программного обеспечения позволяет наладить его эффективную работу, поскольку основной маршрут судна пролегает по реке, вблизи городов. Это позволяет отправлять сообщения при попадании судна в зону действия сотовых сетей и только в случаях, когда судно длительное время находится вне зоны действия сотовых сетей, задействуется спутниковый канал.
GSM-канал позволяет также осуществлять управление системой посредством команд, посылаемых с сотового телефона диспетчера в виде SMS-сообщений. Эта возможность имеет существенные преимущества, поскольку позволяет руководителю транспортной компании в любой момент запрашивать текущую информацию о судне с сотового телефона.
Похожие работы

... изложенным в таблице №8. Установка программного обеспечения так же входит в стоимость поставки комплекта. Таким образом, внедрение системы мониторинга автотранспорта на предприятии ГУП РМЭ "Пассажирские Перевозки" не требует снятия транспорта с линии и появления в структуре организации нового отдела. 5. Безопасность жизнедеятельности при внедрении и использовании системы мониторинга "WEB-GPS ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
... сигналами времени. Ядро предлагает интерфейс для программирования приложения с целью получения функций в виде отдельных программ. 1.2 Разработка автоматизированной системы управления электроснабжением КС «Ухтинская» 1.2.1 Цель создания АСУ-ЭС Целью разработки является создание интегрированной АСУ ТП, объединяющей в единое целое АСУ электрической и теплотехнической частей электростанции, ...

... приведения к базовому узлу, метод удельных весов, метод учета затрат на единицу веса изделия, расчет себестоимости по статьям затрат. В данном проекте приводится расчет себестоимости разработки автоматизированной системы управления торговым предприятием. (АСУТП). АСУТП служит для ведения учета торговой деятельности в Интернет и на аукционе EBay. Из основных преимуществ перед конкурентами стоит ...
0 комментариев