Федеральное агентство по образованию и науке РФ
Тульский государственный университет
Кафедра «Системы автоматического управления»
Отчёт по лабораторной работе № 2
по курсу
ПРОЕКТИРОВАНИЕ МЕХАТРОННЫХ СИСТЕМ
Исследование возможностей коррекции динамических свойств
линейной системы газового привода.
Тула 2008год
Цель и задачи исследования
Овладеть методикой выбора структуры и параметров корректирующих фильтров.
Для достижения поставленной цели требуется решение следующих задач:
1) исследовать влияние постоянной времени ![]() на динамические свойства системы привода;
на динамические свойства системы привода;
2) исследовать влияние разноса постоянных времени корректирующего фильтра  на динамические свойства системы привода;
на динамические свойства системы привода;
3) дать рекомендации по рациональному определению параметров фильтра.
Выполнение работы:
1) Математическая модель исследуемой системы привода в среде MATLAB представлена на рисунке 1
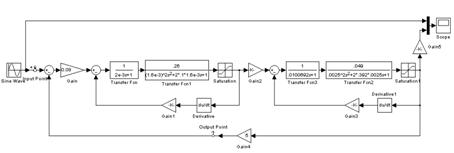
Рисунок 1. Математическая модель системы привода в среде MATLAB.
2) Экспериментально установить предельное значение коэффициента передачи электронного усилителя ![]() , соответствующее границе устойчивости системы привода, приняв
, соответствующее границе устойчивости системы привода, приняв ![]() .
.
Предельное значение коэффициента передачи электронного усилителя ![]()
Частотные характеристики системы привода с предельными значениями запасов устойчивости представлены на рисунке 2.
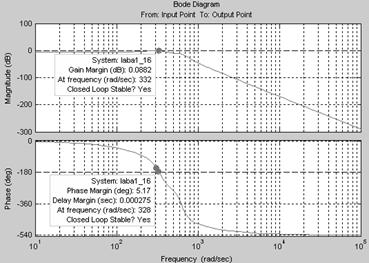
Рисунок 2. ЛАФЧХ системы привода на границе устойчивости.
3) Для простейшей структуры корректирующего фильтра найти его параметры: ![]() и
и ![]() из условия обеспечения запаса устойчивости
из условия обеспечения запаса устойчивости ![]() .
.
Математическая модель исследуемой системы привода с корректирующим фильтром в среде MATLAB представлена на рисунке 3.
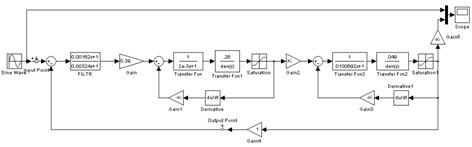
Рисунок 3. Математическая модель системы привода с корректирующим фильтром в среде MATLAB.
Следовательно, передаточная функция корректирующего фильтра имеет вид:
![]() , где
, где ![]() ,
, ![]() .
.
Частотные характеристики скорректированной системы привода представлены на рисунке 4.
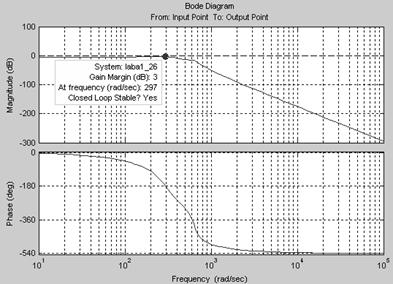
Рисунок 4. Частотные характеристики скорректированной системы привода.
4) Для скорректированной системы получить ЛАЧХ и ЛФЧХ замкнутого и разомкнутого контура системы привода, определить запасы устойчивости по амплитуде ![]() и фазе
и фазе ![]() .
.
Структурная схема скорректированной системы привода представлена на рисунке
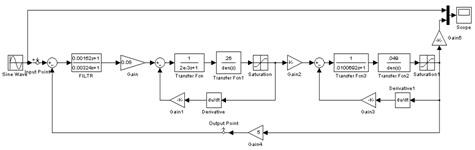
Рисунок 5. Структурная схема скорректированной системы привода.
Частотные характеристики скорректированной системы привода представлены на рисунке 6.
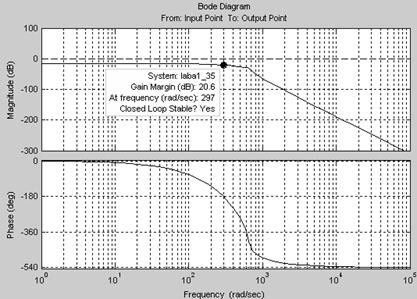
Рисунок 6. Частотные характеристики скорректированной системы привода.
Запасы устойчивости: по амплитуде ![]() .
.
5) Не изменяя ![]() , варьируя разносом постоянных времени
, варьируя разносом постоянных времени ![]() , исследовать его влияние на запасы устойчивости. Исследование проиллюстрировать семейством частотных характеристик.
, исследовать его влияние на запасы устойчивости. Исследование проиллюстрировать семейством частотных характеристик.
а) ![]() ,
, ![]()
![]()
Вид частотных характеристик системы привода при заданных параметрах корректирующего фильтра, т.е. при уменьшении разноса фильтра, представлен на рисунке 7.
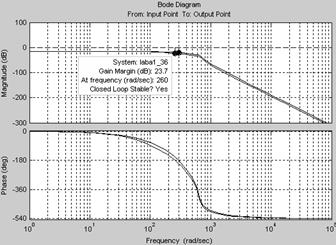
Рисунок 7. Частотные характеристики скорректированной системы привода при уменьшении разноса фильтра.
Из анализа рисунка 7 видно, что при уменьшении разноса фильтра запасы устойчивости в системе привода возрастают. Запасы устойчивости: по амплитуде ![]() .
.
б) ![]() ,
, ![]()
![]()
При увеличении разноса постоянных времени по сравнению с исходным запасы устойчивости в системе уменьшаются. Из анализа рисунка 8 видно, что при данном разносе фильтра запас устойчивости по амплитуде ![]() .
.
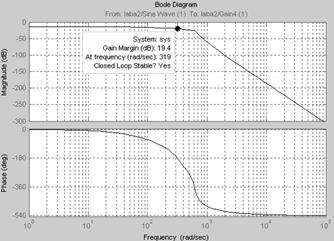
Рисунок 8. Частотные характеристики скорректированной системы привода при увеличении разноса фильтра.
6) Зафиксировав разнос постоянных времени ![]() , варьируя значением
, варьируя значением ![]() , исследовать ее влияние на запасы устойчивости. Исследование проиллюстрировать семейством частотных характеристик.
, исследовать ее влияние на запасы устойчивости. Исследование проиллюстрировать семейством частотных характеристик.
Принимаем ![]() .
.
Исходные значения постоянных времени ![]() ,
, ![]()
а) ![]() ,
, ![]()
При увеличении значений постоянных времени при фиксированном разносе запасы устойчивости возрастают ![]() .
.
Исходные и изменённые частотные характеристики представлены на рисунке 9.
б) ![]() ,
, ![]()
При уменьшении значений постоянных времени при фиксированном разносе запасы устойчивости уменьшаются ![]() .
.
Исходные и изменённые частотные характеристики представлены на рисунке 10.
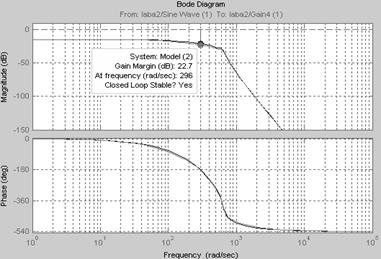
Рисунок 9. Частотные характеристики скорректированной системы привода до и после увеличения постоянных времени фильтра
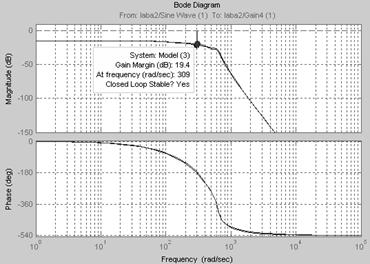
Рисунок 10. Частотные характеристики скорректированной системы привода до и после уменьшения постоянных времени фильтра
7) Экспериментально определить параметры четырехскобочного корректирующего фильтра и оценить его эффективность по сравнению с простейшей структурой
Передаточная функция четырехскобочного корректирующего фильтра имеет вид:
![]() , где
, где ![]()
Структурная схема скорректированной системы, собранная в MATLAB представлена на рисунке 11.
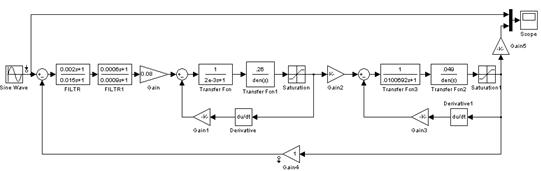
Рисунок 11. Структурная схема скорректированной системы привода c четырёхскобочным фильтром.
Частотные характеристики скорректированной системы привода представлены на рисунке 12.
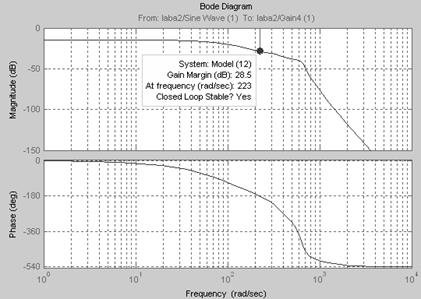
Рисунок 12. Частотные характеристики скорректированной системы привода до и после уменьшения постоянных времени фильтра
Передаточная функция фильтра имеет вид:
![]()
Запасы устойчивости в скорректированной таким образом системе ![]() .
.
Похожие работы



... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... рисунков в формате А0-А1 со скоростью 10-30 мм/с. Фотонаборный аппарат Фотонаборный аппарат можно увидеть только в солидной полиграфической фирме. Он отличается своим высоким разрешением. Для обработки информации фотонаборный аппарат оборудуется процессором растрового изображения RIP, который функционирует как интерпретатор PostScript в растровое изображение. В отличие от лазерного принтера в ...
... , практически, не используются. Проблема информатизации Минторга может быть решена путем создания Автоматизированной Информационной системы Министерства Торговли РФ (АИС МТ РФ) в соответствии с настоящим Техническим предложением. ГЛАВА 2. МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ КОМПЛЕКСА ЗАДАЧ "СИСТЕМА ДОКУМЕНТООБОРОТА УЧЕРЕЖДЕНИЯ”. функции поиска и архивации 2.1. Постановка задачи и её спецификация ...
... МПа, пределы измерений 0…1,6 МПа МС-П2 3 по месту Приборы в спецификации могут быть сгруппированы по позициям на схеме или по маркам. Часть 3. Современные системы управления производством. 1. Структура АСУ ТП. Характерной особенностью развития современной электронной промышленности является бурный рост, сопровождающийся столь же бурным снижением стоимости средств ...
0 комментариев