Отечественные контроллеры ШГН
Отличительные особенности цепного привода от станка качалки
Расчетно–техническая часть
Расчет и выбор элементов выходного фильтра
Специальная часть проекта
Экономический раздел
Методика оценки экономической эффективности новой техники
Расчет экономической эффективности от внедрения частотно регулированного привода
Внутренние перенапряжения
Грозовые перенапряжения
Заземляющие устройства
Расчет молниезащиты подстанции
Гражданская оборона
Навигация
Расчетно–техническая часть
Автоматизированный привод станка-качалки на ОАО "Татнефть"
114531
знак
13
таблиц
14
изображений
2. Расчетно–техническая часть
2.1 Выбор и согласование параметров частотно – регулируемого асинхронного электропривода
В составе частотно-регулируемого асинхронного электропривода выбор и согласование параметров преобразователя частоты и асинхронного короткозамкнутого двигателя является главным вопросом. Для выбора двигателя и преобразователя частоты нужно учитывать следующие параметры:
- диапазон регулирования частоты вращения двигателя (для определения
числа полюсов двигателя и номинальной частоты вращения двигателя);
- нагрузочную характеристику (она определяет ограничения, связанные с охлаждением двигателя и выходом в зону ослабленного поля, т.е. на частоту вращения ротора двигателя выше его номинальной по техническим условиям на двигатель);
- требуемый крутящий момент двигателя (он требуется для определения мощности двигателя);
- тип и мощность преобразователя частоты, учитывая следующие особенности:
- управление одним двигателем или группой;
- двигатель погружной;
- двигатель взрывозащищенный;
- двигатель двухскоростной.
Выбор преобразователя частоты и двигателя для вентилятора/насоса сводится к выполнению алгоритма. Алгоритмы описываются ниже приведенными формулами. Расчет требуемого крутящего момента на валу двигателя
![]() (2.1)
(2.1)
где РН - мощность нагрузки в кВт;
N - число оборотов двигателя, об/мин;
ТН - крутящий момент на валу двигателя, (н·м) или (кгс·м).
Необходимо проверять мощность на валу с учетом момента нагрузки и условий окружающей среды. Обычно когда температура уменьшается, мощность на валу увеличивается.
2.2 Предварительный выбор двигателя/преобразователя на основе данных и расчетов
а) Выбор мощности двигателя: РДВ. > РНАГРУЗКИ, (кВт).
Мощность двигателя должна быть больше мощности нагрузки.
б) Выбор мощности преобразователя частоты.
Мощность преобразователя частоты выбирается так, чтобы номинальный ток двигателя (IДВ) был меньше или равен току на выходе преобразователя частоты (IПЧ)
Дан асинхронный двигатель (таблица 2.1) с короткозамкнутым ротором типа 4А100L4У3, с моментом статической нагрузки Мс=26,7 Н·м и моментом инерции Jрм=0,1 кг·м2. Определить параметры и составить структурную схему силовой части.
Таблица 2.1 Технические данные двигателя 4А100L4У3
| Наименование | Размерность | Значение | |||
| Номинальная мощность, Рном | кВт | 4 | |||
| Номинальное напряжение сети, U1л | В | 380 | |||
| Номинальная частота питающей сети, fc | Гц | 50 | |||
| Синхронная частота вращения, nо | об/мин | 1500 | |||
| Номинальное скольжение, sном | % | 4,6 | |||
| Скольжение критическое, sкр | % | 31,5 | |||
| Отношение Мпуск /Мном | - | 2,0 |
| |||
| Отношение Ммин/Мном | - | 1,6 |
| |||
| Отношение Мкр /Мном | - | 2,4 |
| |||
| Отношение Iпуск /Iном | - | 6,0 |
| |||
| Момент инерции, Jдв | кг*м2 | 0,011 |
| |||
| КПД, cosφном | % | 87 |
| |||
| Коэффициент мощности, cosφном | - | 0,83 |
| |||
Таблица 2.2 Параметры схемы замещения в относительных единицах
| Параметры | Хμ | В номинальном режиме | При коротком замыкании | |||||
| Статора | Ротора | |||||||
| R1 | X1 | R2 | X2 | R2п | Rкп | X2 | ||
| В отн. единицах | 2,4 | 0,067 | 0,079 | 0,053 | 0,14 | 0,058 | 0,13 | 0,15 |
Номинальный фазный ток статора определяется по формуле:
![]() (2.2)
(2.2)
Значение параметров схемы замещения в именованных единицах определяются по формулам:
![]() , (2.3)
, (2.3)
![]() (2.4)
(2.4)
где x, r – сопротивление, Ом
X, R – сопротивление, отн. ед.
Результаты расчета сопротивлений в именованных единицах представлены в таблице 2.3.
Таблица 2.3 Параметры схемы замещения в именованных единицах
| Параметры | Хμ | В номинальном режиме | При коротком замыкании | |||||
| Статора | Ротора | |||||||
| R1 | X1 | R2 | X2 | R2п | Rкп | X2 | ||
| Сопротивление в Ом | 59,28 | 1,64 | 1,95 | 1,31 | 3,46 | 1,43 | 3,21 | 3,71 |
В силовую часть электропривода входят асинхронный двигатель с короткозамкнутым ротором и комплектный преобразователь частоты.
Условием выбора преобразователя частоты является соответствие номинального напряжения и тока тиристорного преобразователя номинальным параметрам двигателя, т.е.
UТПном > U1ном, IТПном > I1ном.
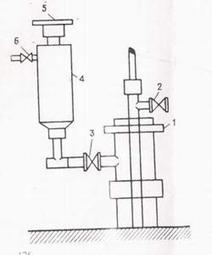
Для питания двигателя выбран комплектный электропривод типа АТО4 5,5 (рисунок 2.2.1). Данный преобразователь является тиристорным электроприводом с автономным инвертором напряжения.
Параметры тиристорного преобразователя представлены в таблице 2.4.
Таблица 2.4 Данные комплектного электропривода АТО4 5,5
| Наименование | Размерность | Значение |
| Напряжение питающей сети, Ucном | В | 380 |
| Частота питающей сети, fном | Гц | 50±2% |
| Число фаз, m | - | 3 |
| Номинальное напряжение выходное, линейное U1 | В | 0±380, ±2% |
| Номинальный ток, I1 | А | 11 |
| Выходная частота, f1 | Гц | 0±400, ±0,05% |
| Ток перегрузки, Iдоп | % | 150 |
| Длительность перегрузки, t | с | 60 |
Электропривод АТО4 5,5 предназначен для высокодинамичных электроприводов механизмов с высокими требованиями к регулированию параметров при четырехквадрантном управлении.
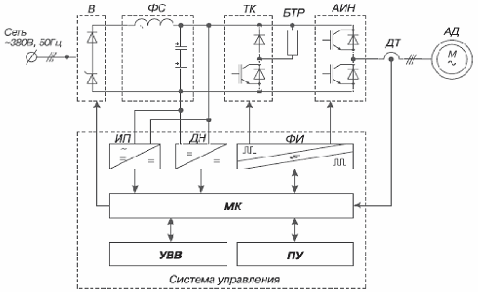
Рис. 2.1 Комплектный электропривод АТО4 5,5
B – силовой полууправляемый выпрямитель
ФС – силовой LC-фильтр звена постоянного напряжения;
ТК – тиристорный ключ реостатного торможения (тормозной ключ);
БТР – блок тормозного резистора.
АД асинхронный электродвигатель;
ИП источник питания (конвертор);
ДН датчик напряжения;
ФИ формирователь управляющих сигналов тиристоров (драйвер);
МК микропроцессорный контроллер.
Силовой канал ВФСАИН осуществляет двухступенчатое преобразование электрической энергии выпрямление сетевого напряжения с помощью нерегулируемого выпрямителя В и последующее инвертирование выпрямленного постоянного по величине напряжения посредством автономного инвертора напряжения АИН. Алгоритм ШИМ обеспечивает взаимосвязанное регулирование частоты F и величины U выходного напряжения по заданному закону, а также формирует синусоидальную форму кривой тока приводного АД.
Для реализации режима динамического (реостатного) торможения в звено постоянного тока электропривода включён тормозной тиристорный (IGBT), ключ ТК и внешний блок тормозного резистора БТР. Датчики тока ДТ и напряжения ДН в силовом канале электропривода служат для контроля, регулирования и измерения электрических параметров электропривода, в т.ч. для защиты от токов перегрузки и короткого замыкания, недопустимых отклонений напряжения.
Многоканальный источник питания ИП преобразует сетевое переменное напряжение или выпрямленное напряжение звена постоянного тока в систему напряжений постоянного тока требуемых уровней и степени стабильности, гальванически связанных и не связанных между собой, для питания устройств управления.
Микропроцессорный контроллер МК осуществляет формирование режимов работы электропривода с заданными параметрами с помощью сигналов управления: сигналов ШИМ – управления тиристорами АИН, сигналов защиты и аварийного отключения электропривода, приёма и передачи внешних управляющих, задающих и информационных сигналов.
Похожие работы
... - 78 % Трубы всех типов исполнения, имеют длины: 1 группа - от 5,5 до 8,5 м 2 группа - свыше 8,5 до 10 м. 3.2 Техника и оборудование применяемое для депарафинизации скважин в условиях НГДУ «ЛН» Для депарафинизации скважин в НГДУ “ ЛН” применяют различное оборудование. Краткое их описание и технические характеристики приведены ниже. Наиболее часто применяют для депарафинизации скважин ...

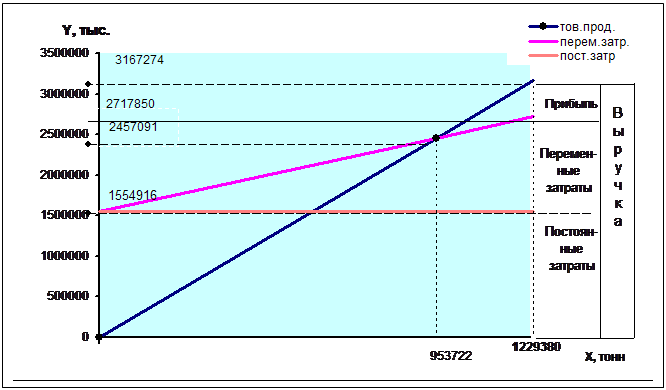
... покрытия и коэффициент обеспеченности собственными средствами выше своих нормативных значений. Это позволяет сделать вывод об удовлетворительной структуре баланса НГДУ «Елховнефть» и платёжеспособности самого предприятия. 5.АНТИКРИЗИСНЫЙ МЕНЕДЖМЕНТ НА ПРЕДПРИЯТИИ 5.1 Выявление слабых и сильных сторон в деятельности предприятия 5.1.1. Определение безубыточного объёма продаж и зоны ...
0 комментариев