Навигация
Устройство цифровой фильтрации на основе микроконтроллера фирмы AVR ATmega16
23331
знак
0
таблиц
13
изображений
ВВЕДЕНИЕ
В связи с повсеместным использованием цифровых управляющих систем постоянно растет необходимость разработки и усовершенствования их.
Большинство цифровых систем строится на микропроцессорах либо на микроконтроллерах. При помощи микропроцессорных систем происходит управление различными технологическими процессами и операциями. Данные системы практически универсальны, так как они имеют очень высокое быстродействие, и достаточную разрядность для различных выполнения различных расчетов на производстве. Используя в данных системах ППЗУ, возможно, при помощи одной компьютерной системы управление различным оборудованием. То есть необходимо изменение только программы управления.
Центральное место в структуре микропроцессорного устройства занимает микропроцессор, который выполняет арифметические и логические операции над данными, программное управление процессором обработки информации, организует взаимодействие всех устройств, входящих в систему. Микропроцессор представляет собой функционально законченное устройство, состоящее из одной или нескольких программно-управляемых БИС и предназначенное для выполнения операций по обработке информации и управления вычислительным процессом.
В курсовой работе разрабатывается устройство на базе микроконтроллера фирмы AVR семейства Mega.
Эти контроллеры характеризуются наиболее развитой периферией, наибольшими среди всех микроконтроллеров AVR объемами памяти программ и данных, поддерживают несколько режимов пониженого энергопотребления, имеют блок прерываний, сторожевой таймер и допускают программирование непосредственно в готовом устройстве. Они предназначены для использования в мобильных телефонах, контроллерах различного периферийного оборудования (принтеры, сканеры, современные дисковые накопители, приводы CD-ROM / DVD-ROM и т. п.), сложной офисной технике и т. д.
Микроконтроллер АТmega16 выбран на основании того, что он полностью удовлетворяет требованиям для реализации заданного устройства, а также имеет доступную цену и широко распространен.
1. АНАЛИЗ ПОСТАВЛЕННОЙ ЗАДАЧИ
Процесс проектирования интегрирующего устройства состоит из тех же этапов, что и процесс проектирования аналоговых фильтров. Сначала формулируются требования к желаемым характеристикам интегратора, по которым затем рассчитываются его параметры. Амплитудная и фазовая характеристики формируются аналогично аналоговым фильтрам. Ключевое различие между аналоговым и цифровым интеграторами заключается в том, что, вместо вычисления величин сопротивлений, емкостей и индуктивностей для аналогового интегратора, рассчитываются значения коэффициентов для цифрового. Иными словами, в цифровом интеграторе числа заменяют физические сопротивления и емкости аналогового. Эти числа являются коэффициентами, они постоянно находятся в памяти и используются для обработки (фильтрации) дискретных данных, поступающих от АЦП.
Интегрирующее устройство, работающий в реальном масштабе времени, оперирует с дискретными по времени данными в противоположность непрерывному сигналу, обрабатываемому аналоговым интегратором. При этом очередной отсчет, соответствующий отклику интегратора, формируется по окончании каждого периода дискретизации.
Вначале сигнал должен быть оцифрован с помощью АЦП для получения выборки x(n). Далее эта выборка поступает на цифровой интегратор. Отсчеты выходных данных y(n) используются для восстановления аналогового сигнала с использованием ЦАП с низким уровнем ложного сигнала.
В дискретных системах, даже с высокой степенью избыточной дискретизации, требуется наличие аналоговых ФНЧ перед АЦП и после ЦАП для устранения эффекта наложения спектра.
1.1 Описание интегратора 1-го порядка
Интегрирующее устройство (ИУ), интегратор – вычислительное устройство для определения интеграла, например вида где х и у — входные переменные. Входными переменными величинами могут быть механическое перемещение, давление, электрический ток (напряжение), число импульсов, температура и т. п.
Интегратор используется как самостоятельное вычислительное устройство при решении математических задач методами интегрирования; может служить элементом системы автоматического регулирования (интегрирующее звено); входить в состав вычислительной машины; использоваться для моделирования физического процесса и т. д. Интегратор применяют для изучения фильтрации.
Цифровые интеграторы входят в состав цифровых дифференциальных анализаторов, а также некоторых специализированных вычислительных устройств, например интерполяторов. Интегрирование функции в цифровых ИУ заменяется операцией суммирования конечного числа последовательных значений этой функции (её приращений), заданных в дискретных точках. При этом входная и выходная числовая информация представляется в виде электрических импульсов, а интегрирование осуществляется суммированием этих импульсов. Выбирая цену импульсов достаточно малой, можно обеспечить практически необходимую точность при замене интеграла суммой; точность аналогового ИУ ограничена.
ИУ описывается системой уравнений
x1[n]=x[n];
![]() x2 [n]= x1[n] + x3[n-1];
x2 [n]= x1[n] + x3[n-1];
x3 [n]= x1[n] + x2[n-1];
x4 [n]= kx1[n];
y[n]= x4[n] .
где y[n], x[n] – входная и выходная последовательности;
xi[n] – состояние i-го узла графа схемы усреднения;
![]() - постоянный коэффициент усреднения,
- постоянный коэффициент усреднения,
![]()
где δ – заданная погрешность восстановления идеальной АЧХ;
fd- частота прихода значений входной последовательности;
N – число циклов усреднения.
Частота сигнала, поступающего на вход равна 50 Гц, тогда минимальная частота дискретизации должна быть не менее 100Гц.
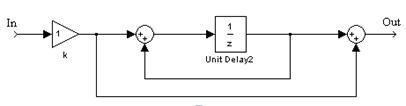
Рис.1.2 – Структурная схема интегратора
1.2 Аналитический обзор микроконтроллера AТmega16
AТmega16 представляет собой 8-разрядные микроконтроллеры с 16 Кбайтами внутрисистемной программируемой Flash памяти. Он обладает следующими характеристиками:
· 8-разрядный высокопроизводительный AVR микроконтроллер с малым потреблением
· Прогрессивная RISC архитектура
1. 130 высокопроизводительных команд, большинство команд выполняется за один тактовый цикл,
2. 32 8-разрядных рабочих регистра общего назначения
Полностью статическая работа
3. Производительность приближается к 16 MIPS (при тактовой частоте 16 МГц)
4. Встроенный 2-цикловый перемножитель
· Энергонезависимая память программ и данных
1. 16 Кбайт внутрисистемно программируемой Flash памяти (In-System Self-Programmable Flash) :
-обеспечивает 1000 циклов стирания/записи
- дополнительный сектор загрузочных кодов с независимыми битами блокировки
- Внутрисистемное программирование встроенной программой загрузки
- Обеспечен режим одновременного чтения/записи (Read-While-Write)
2. 512 байт EEPROM:
- Обеспечивает 100000 циклов стирания/записи
3. 1 Кбайт встроенной SRAM
- Программируемая блокировка, обеспечивающая защиту программных средств пользователя
· Интерфейс JTAG (совместимый с IEEE 1149.1)
1. Возможность сканирования периферии, соответствующая стандарту JTAG
2. Расширенная поддержка встроенной отладки
3. Программирование через JTAG интерфейс: Flash, EEPROM памяти, перемычек и битов блокировки
· Встроенная периферия
1. Два 8-разрядных таймера/счетчика с отдельным предварительным делителем, один с режимом сравнения
2. Один 16-разрядный таймер/счетчик с отдельным предварительным делителем и режимами захвата и сравнения
3. Счетчик реального времени с отдельным генератором
4. Четыре канала PWM
5. 8-канальный 10-разрядный
6. Байт-ориентированный 2-проводный последовательный интерфейс
7. Программируемый последовательный USART
8. Последовательный интерфейс SPI (ведущий/ведомый)
9. Программируемый сторожевой таймер с отдельным встроенным генератором
10. Встроенный аналоговый компаратор
· Специальные микроконтроллерные функции
1.Сброс по подаче питания и программируемый детектор кратковременного снижения напряжения питания
2.Встроенный калиброванный RC-генератор
3. Внутренние и внешние источники прерываний
4. Шесть режимов пониженного потребления: Idle, Power-save, Power-down, Standby, Extended Standby и снижения шумов ADC
· Выводы I/O и корпуса
32 программируемые линии ввода/вывода
40-выводной корпус PDIP и 44-выводной корпус TQFP
· Рабочие напряжения 4,5 - 5,5 В
· Рабочая частота 0 - 16 МГц (ATmega16)
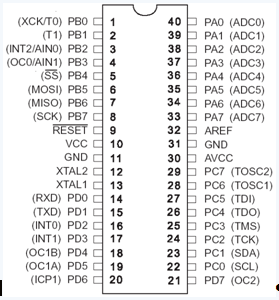
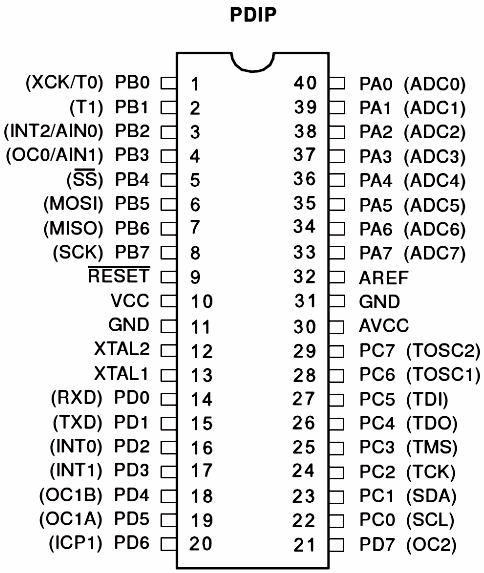
Рис.1.3 - Расположение выводов контролера ATmega16
Похожие работы
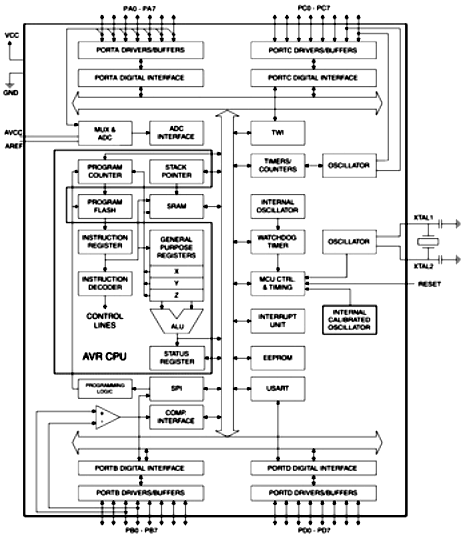
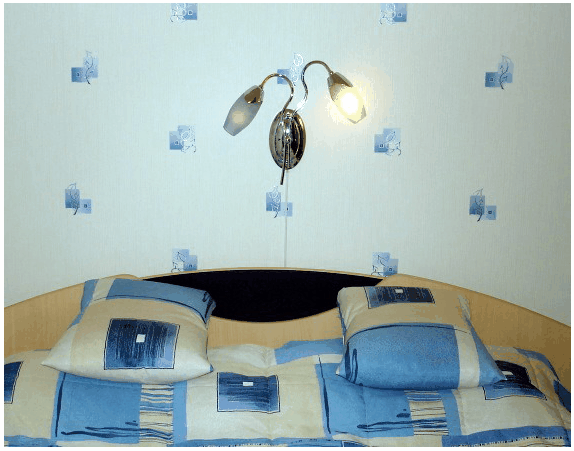
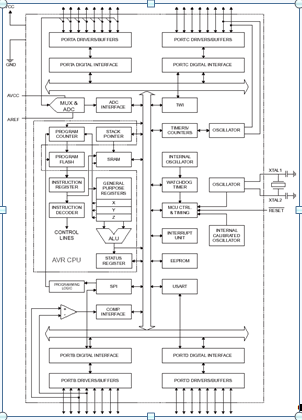
... 4,5 - 5,5 В (ATmega16) * Рабочая частота 0 - 8 МГц (ATmega16L) 0 - 16 МГц (ATmega16) Рисунок 1.4 – Функциональная схема микроконтроллера ATMega 16L РАЗДЕЛ 2 РАЗРАБОТКА УСТРОЙСТВА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СВЕТА Несмотря на бурное развитие сверхъярких светодиодов, в широкой продаже пока не появились светодиодные лампы, способные заменить бытовые лампы накаливания. Получившие ...
0 комментариев