Навигация
Требования к программному изделию
169417
знаков
2
таблицы
16
изображений
3. Требования к программному изделию
3.1 Требования к функциональным характеристикам
Программный модуль должен обеспечивать выполнение следующих функций:
- Ввод исходных данных с чертежа и технологии;
- Создание наладки режущего инструмента;
- Расчет всех необходимых геометрических свойств;
- Проверку по ограничениям станка;
- Визуализацию обработки;
- Корректировку введенных данных;
- Расчет траектории обработки;
- Назначение подачи с учётом ограничений, связанных с характером движения, допустимым диапазоном подач, особенностями реализации режимов разгона – торможения в ЧПУ;
- Формирование циклов обработки;
- Назначение припусков обработки;
- Расчет траектории обработки;
- Диагностика ошибок;
- Формирование кода управляющей программы;
- Выдачу в файл текста управляющей программы обработки.
Результатом работы будет файл управляющей программы, готовый к запуску на станке в ЧПУ Walter CIP6.
3.2 Требования к надежности
- ограничение ввода некорректной информации;
- контроль достоверности информации;
- обеспечение наглядности создаваемых процессов;
- защита от случайных нажатий клавиш;
- дружественность интерфейса пользователя.
3.3 Условия эксплуатации
- корректная работа пользователей;
- соблюдение инструкций работы с программным модулем;
- соответствие программного обеспечения, установленного на компьютере пользователя.
3.4 Требования к составу и параметрам технических средств
Система предназначена для работы на IBM – совместимых компьютерах с минимальной конфигурацией: процессор – 2200 Mh и выше, объем оперативной памяти 512 Mb и более, размер свободного места на жестком диски не менее 50Mb, монитор с разрешением 1024х768 и выше, профессиональная видеокарта, мышь с колесом прокрутки, клавиатура.
3.5 Требования к информационной и программной зависимости
Система должна работать под управлением операционной системы Windows 2000 или Windows XP, пакет твердотельного моделирования Designer Modeling 2005.
4. Требования к программной документации
Разрабатываемые программные модули должны быть документированы, т.е. тексты программ должны содержать все необходимые комментарии.
Информационная система должна включать справочную систему о работе и подсказки пользователю.
В состав сопровождающей документации должны входить:
- описание программных модулей;
- описание функций программных модулей.
Инструкция пользователю по работе с программными модулями.
5. Технико-экономические показатели
Разработать систему подготовки обработки детали станка с ЧПУ предназначенную для создания управляющей программы операций шлифования осевого инструмента, автоматизации расчетов технологических переходов, а также визуализации обработки при помощи пакета твердотельного моделирования Designer Modeling 2005.
Использование данного программного модуля должно обеспечить корректное преобразование траектории движения инструмента и технологические команды в коды управления соответствующей комбинацией "станок - система ЧПУ", без использования другого специализированного программного обеспечения. А также позволит создавать программы для обработки сложного по конструкции осевого инструмента, проводить глубокий анализ конструкционных и режущих свойств реального изделия на этапе разработки управляющей программы, повысить качество выпускаемой продукции.
Разработать систему подготовки обработки детали станка с ЧПУ, которая будет иметь простой интерфейс, понятный конечному пользователю, высокую скорость работы, возможность анализа ряда технологических и конструкционных параметров.
6. Стадии и этапы разработки
Разработка основного алгоритма работы модуля дней
Отладка и тестирование на реальных изделиях дней
Разработка пользовательского интерфейса дней
Тестирование специалистами бюро разработки управляющих программ для анализа работы и выдачи замечаний дней
Доработка замечаний дней
Окончательное тестирование работы программного модуля
постпроцессора дней
7. Запуск и отладка программного модуля
Запуск и отладка программного модуля включает следующие этапы:
- Разработка, согласование и утверждение программы и методики испытаний;
- Проведение предварительных государственных, межведомственных, приёмо-сдаточных и других видов испытаний;
- Корректировка программы и программной документации по результатам испытаний;
- Подготовка и передача программы и программной документации для сопровождения и изготовления;
- Оформление и утверждение акта о передаче программы на сопровождение и изготовление.
8. Порядок контроля и приемки программного модуля
Первоначальные испытания работоспособности разработанного программного модуля мехатронной системы станка с ЧПУ Walter CIP6 проводит разработчик на стадии его разработки. Контроль работоспособности готового программного модуля постпроцессора проводит заказчик. Для этого он может привлекать экспертов своей организации или экспертов со стороны.
1. Анализ мехатронной системы станка с ЧПУ 1.1 Общая структура и классификация систем ЧПУ
На основе достижений кибернетики, электроники, вычислительной техники и приборостроения были разработаны принципиально новые системы программного управления – системы ЧПУ, широко используемые в промышленности. Эти системы называют числовыми потому, что величина каждого хода исполнительного органа станка задается с помощью числа. Каждой единице информации соответствует дискретное перемещение исполнительного органа на определенную величину, называемой разрешающей способностью системы ЧПУ или ценой импульса.
В определенных пределах исполнительный орган можно переместить на любую величину, кратную разрешающей способности. Число импульсов, которое можно подать на вход привода, чтобы осуществить требуемое перемещение, определяется отношением длины перемещения к цене импульса системы ЧПУ. Число импульсов, записанное в определенной системе кодирования на носителе информации (перфоленте, магнитной ленте и других), является программой, определяющей величину размерной информации.
Станки с программным управлением по виду управления подразделяют на станки и системами циклового программного управления и станки с системами числового программного управления. Системы циклового программного управления более просты, так как в них программируется только цикл работы станка, а величины рабочих перемещений, т.е. геометрическая информация, задаются упрощенно, например, с помощью упоров. В станках с ЧПУ управление осуществляется от программы, в которой в числовом виде занесена и геометрическая, и технологическая информация.
Система ЧПУ – это совокупность специализированных устройств, методов и средств, необходимых для реализации ЧПУ станком, предназначенная для выдачи управляющих воздействий исполнительным органам станка в соответствии с управляющей программой [1].
Устройство программного управления станками – это часть системы ЧПУ, выполненная как единое целое с ней и осуществляющая выдачу управляющих воздействий по заданной программе.
Числовое программное управление – это управление, при котором программу задают в виде записанного на каком-либо носителе массива информации. Управляющая информация для систем ЧПУ является дискретной и ее обработка в процессе управления осуществляется цифровыми методами. Управление технологическими циклами практически повсеместно осуществляется с помощью программируемых логических контроллеров, реализуемых на основе принципов цифровых электронных вычислительных устройств.
Структурная схема системы ЧПУ представлена на рисунке 1, а. Чертеж детали (ЧД), подлежащий обработке на станке с ЧПУ, одновременно поступает в систему подготовки программы (СПП) и систему технологической подготовки (СТП). Последняя обеспечивает систему подготовки программы данными о разрабатываемом технологическом процессе, режимах резания и так далее. На основании этих данных разрабатывается управляющая программа (УП). Наладчики устанавливают на станок приспособления, режущие инструменты согласно документации, разработанной в системе технологической подготовки. Установку заготовки и снятие готовой детали осуществляет оператор или автоматический загрузчик. Считывающее устройство (СУ) считывает информацию с носителя программы. Информация поступает в устройство ЧПУ, которое выдает управляющие команды на целевые механизмы (ЦМ) станка, осуществляющие основные и вспомогательные движения цикла обработки. Операционная система на основе информации (фактическое положение, скорость перемещения исполнительных узлов, фактический размер обрабатываемой поверхности, тепловые и силовые параметры технологической системы и др.) контролируют величину перемещения целевого механизма. Станок содержит несколько целевых механизмов, каждый из которых включает в себя (рисунок 1, б): двигатель (ДВ), являющийся источником энергии; передачу (П), служащую для преобразования энергии и ее передачи от двигателя к исполнительному органу (ИО); собственно исполнительный орган (стол, салазки, суппорт, шпиндель и т.д.), выполняющие координатные перемещения цикла.
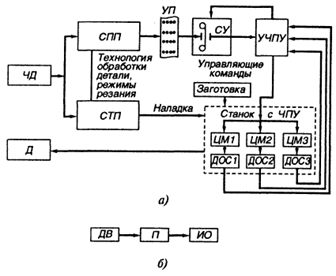
Рисунок 1 - Структурная схема системы ЧПУ и целевого механизма
Система ЧПУ может видоизменяться в зависимости от вида программоносителя, способа кодирования информации в управляющей программе и метода ее передачи в систему ЧПУ. Устройство ЧПУ размещают рядом со станком (в одном или двух шкафах) или непосредственно на станке (в подвесных или стационарных пультах управления). Двигатели приводов подач станков с ЧПУ, имеющие специальную конструкцию и работающие с конкретным устройством ЧПУ, являются составной частью системы ЧПУ.
Все данные, необходимые для обработки заготовки на станке с ЧПУ, получает от управляющей программы, которая содержит два вида информации: геометрическую и технологическую. Геометрическая информация – координаты опорных точек траектории движения инструмента, а технологическая – данные о скорости, подаче, номере инструмента и т. д. Управляющую программу записывают на программоносителе. В оперативных системах ЧПУ программа может вводиться (с помощью клавиш) непосредственно на станке.
Важнейшей технической характеристикой систем ЧПУ является ее разрешающая способность или дискретность, т. е. минимально возможная величина линейного и углового хода исполнительного органа станка, соответствующая одному управляющему импульсу. Большинство современных систем ЧПУ имеют дискретность 0,001 мм/импульс, реже 0,0001 мм/импульс.
Системы ЧПУ классифицируют по следующим признакам:
- по уровню технических возможностей;
- по технологическому назначению;
- по числу потоков информации (незамкнутые, замкнутые, самоприспосабливающиеся или адаптивные);
- по принципу задания программы (в декорированном виде, т.е. в абсолютных координатах или в приращениях от ЭВМ);
- по принципу привода (ступенчатый, регулируемый, следящий, шаговый);
- по числу одновременно управляемых координат;
- по способу подготовки и ввода управляющей программы.
По уровню технологических возможностей международной классификации системы ЧПУ делятся на следующие классы:
- NC – системы с покадровым чтением перфоленты на протяжении цикла обработки каждой заготовки;
- SNC – системы с однократным чтением всей перфоленты перед обработкой партии одинаковых заготовок;
- CNC – системы со встроенной малой ЭВМ (компьютером, микрокомпьютером);
- DNC – системы прямого числового управления группами станков от одной ЭВМ;
- HNC – оперативные системы с ручным набором программ на пульте управления.
По технологическому назначению системы ЧПУ подразделяются на четыре вида: позиционные; обеспечивающие прямоугольное формообразование; обеспечивающие прямолинейное формообразование; обеспечивающие криволинейное формообразование [22].
Позиционные системы ЧПУ обеспечивают высокоточное перемещение (координатную установку) исполнительного органа станка в заданную программой позицию за минимальное время. По каждой координатной оси программируется только величина перемещения, а траектория перемещения может быть произвольной. Перемещение исполнительного органа из позиции в позицию осуществляется с максимальной скоростью, а переход к заданной позиции – минимальной скоростью. Точность позиционирования повышается в результате подхода исполнительного органа к заданной позиции всегда с одной стороны (например, слева направо). Позиционными системами ЧПУ оснащают сверлильные и координатно-расточные станки.
Системы ЧПУ, обеспечивающие прямоугольное формообразование, в отличие от позиционных систем позволяют управлять перемещением исполнительного органа станка в процессе обработки. В процессе формообразования исполнительный орган станка перемещается по координатным осям поочередно, поэтому траектория инструмента имеет ступенчатый вид, а каждый элемент этой траектории параллелен координатным осям. Чтобы сократить время перемещения исполнительного органа из одной позиции в другую, в ряде случаев используют одновременное движение по двум координатам. При грубом позиционировании подход исполнительного органа к заданной позиции осуществляется с разных сторон, а при точном позиционировании – всегда с одной стороны. Число управляемых координат в таких системах достигает 5, а число одновременно управляемых координат – 4. Указанными системами оснащают токарные, фрезерные, расточные станки.
Системы ЧПУ, обеспечивающие прямолинейное (под любым углом к координатным осям станка) формообразование и позиционирование, управляют движением инструмента при резании одновременно по двум координатным осям (X и Y). В данных системах используют двухкоординатный интерполятор, выдающий управляющие импульсы сразу на два привода подач. Общее число управляемых координат в таких системах 2 – 5. Указанные системы обладают большими технологическими возможностями (по сравнению с прямоугольными) и применяются для оснащения токарных, фрезерных, расточных и других видов станков.
Системы ЧПУ, обеспечивающие криволинейное формообразование, позволяют управлять обработкой плоских и объемных деталей, содержащих участки со сложными криволинейными контурами.
Системы ЧПУ, обеспечивающие прямоугольное и криволинейное формообразование, относятся к контурным (непрерывным системам), так как они позволяют обрабатывать заготовку по контуру. Контурные системы ЧПУ имеют, как правило, шаговый двигатель.
Многоцелевые (сверлильно-фрезерно-расточные) станки для расширения их технологических возможностей оснащают контурно-позиционными системами ЧПУ.
По числу потоков информации системы ЧПУ делятся на замкнутые, разомкнутые и адаптивные.
Разомкнутые системы ЧПУ характеризуются наличием одного потока информации, поступающего со считывающего устройства к исполнительному органу станка. В механизмах подач таких систем используют шаговые двигатели. Крутящий момент, развиваемый шаговым двигателем, недостаточен для привода механизма подачи. Поэтому указанный двигатель применяют в качестве задающего устройства, сигналы которого усиливаются различными способами, например, с помощью гидроусилителя моментов (аксиально-поршневого гидродвигателя), вал которого связан с ходовым винтом привода подач. В разомкнутой системе нет датчика обратной связи, и поэтому отсутствует информация о действительном положении исполнительных органов станка.
Замкнутые системы ЧПУ характеризуются двумя потоками информации: от считывающего устройства и от датчика обратной связи. В этих системах рассогласование между заданными и действительными величинами перемещения исполнительных органов устраняется благодаря наличию обратной связи.
Адаптивные системы ЧПУ характеризуются тремя потоками информации:
- от считывающего устройства;
- от датчика обратной связи по пути;
- от датчиков, установленных на станке и контролирующих процесс обработки по таким параметрам, как износ режущего инструмента, изменение сил резания и трения, колебание припуска и твердости материала обрабатываемой заготовки и т.д. Такие системы позволяют корректировать программу обработки с учетом реальных условий резания.
По способу подготовки и ввода управляющей программы различают так называемые оперативные системы ЧПУ (в этом случае управляющую программу готовят и редактируют непосредственно на станке, в процессе обработки первой детали из партии или имитации ее обработки) и системы, для которых управляющая программа готовится независимо от места обработки детали. Причем независимая подготовка управляющей программы может выполняться либо с помощью средств вычислительной техники, входящих в состав систем ЧПУ данного станка, либо вне ее (вручную или с помощью системы автоматизации программирования).
1.2 Обоснование применения программного управления оборудованиемПо мере развития общества потребности человека неуклонно растут. Добиваясь определенного уровня благосостояния, человек стремится к новым вершинам – такова его природа. В то же время, находя пути удовлетворения своих потребностей, человек вынужден становиться производителем материальных благ. А став производителем, вынужден постоянно работать над совершенствованием технологии производства, повышая его эффективность и улучшая качество продукции [2]. На сегодняшний день никто из нас не мыслит себе жизнь без домашней и офисной техники, посуды, упаковки и т.д., имеющих современный дизайн. А это – пластмассовые и металлические корпуса, состоящие из массы сложных поверхностей, которые подчас невозможно даже отобразить на чертеже. Уровень современной технологии позволяет создавать в памяти компьютера трехмерные модели деталей сложной формообразующей оснастки штампов и пресс-форм и изготавливать их на станках с числовым программным управлением в условиях единичного производства. При этом процесс подготовки управляющих программ для станка с числовым программным управлением выполняется автоматически на основе трехмерной модели изделия. Сложная деталь изготавливается "с листа", без создания опытных образцов. Естественно, что при наличии на предприятии потока индивидуальных заказов остро встает проблема организации и планирования производства, решаемая также при помощи современных автоматизированных систем. Идея гибкого автоматизированного производства не является новой, но при современном уровне развития компьютерных технологий и сетевых решений приобретает особое значение. В то же время задача создания такого производства достаточно сложна. Она выдвигает повышенные требования, как к программному обеспечению инженерного корпуса, так и к системам управления оборудованием.
Наш взгляд на систему числового программного управления металлообрабатывающего оборудования за последние 10 - 15 лет претерпел кардинальные изменения. Ранее единственной тенденцией развития станков с числовым программным управлением была тенденция превращения их в обрабатывающие центры. При этом станки оснащались магазинами, рассчитанными на большое количество инструментов. Для встраивания станка в автоматическую линию он комплектовался быстросменными столами-спутниками и их накопителями. Программирование осуществлялось вручную. С появлением мощных (и особенно персональных) компьютеров стало возможным создавать управляющие программы для станков с числовым программным управлением автоматически, сократив до минимума количество ручного труда. Это позволило разрабатывать управляющие программы для обработки сложных трехмерных поверхностей, используемых чаще всего в формообразующих деталях оснастки штампов и пресс-форм. При этом требования, предъявляемые к станкам с числовым программным управлением, изменились. Произошло это в основном благодаря увеличению размера и структурным изменениям управляющей программы, а также существенному увеличению доли основного времени обработки при соответствующем уменьшении доли вспомогательного времени. Управляющая программа (УП) обработки одной поверхности теперь достигает нескольких мегабайтов (а иногда и десятков мегабайтов) и состоит из множества "коротких кадров" – программных блоков, описывающих короткие перемещения инструмента (чем выше точность обработки, тем короче эти перемещения, так как их длина определяет точность аппроксимации). Обработка при этом ведётся преимущественно одним инструментом много часов подряд, а станок теряет уже ставшее привычным оснащение: магазины, столы-спутники и т.д. Разумеется, речь здесь идет о станке, предназначенном для изготовления сложной формообразующей оснастки. Количество управляемых координат при этом возросло до пяти. Но вместе с этим значительно выросли требования к системе ЧПУ.
Учитывая имеющийся на данный момент практический опыт, можно сказать, что современная система ЧПУ, предназначенная для сложной трехмерной обработки, должна обеспечивать следующее:
1. Возможность ввода (приема с внешнего носителя или через сеть) управляющих программ неограниченного размера, их редактирования и исполнения как единого целого.
2. С целью уменьшения основного времени обработки – опережающая (по отношению к исполнению) расшифровка кадров управляющей программы:
- возможность отработки движения без снижения до нуля скорости в конце перемещения, описанного в каждом отдельном кадре (при соблюдении условия отсутствия превышения максимальных ускорений по осям);
- это позволяет отрабатывать сложную траекторию, описываемую в управляющей программе и состоящую из множества "коротких кадров", на скорости, близкой к заданной скорости подачи;
- определение предельных ускорений по управляемым осям с учетом динамических характеристик станка;
- возможность перехода с одной траектории обработки на другую на рабочей подаче без торможений и разгонов по трехмерной петле, рассчитанной системой CAM (computer-aided manufacturing);
- для этого требуется интеграция с CAM-системой или с CAM-сервером через сеть;
- возможность работы на повышенных скоростях рабочих подач (до 60 м/мин);
- с этой целью помимо достаточной для перекрытия требуемого диапазона регулирования разрядности цифро-аналогового преобразователя необходимо, чтобы время гарантированной реакции системы управления движением было относительно малым (около 200 мкс).
3. С целью снижения времени переналадки – доступ к файлам и ресурсам конструкторского и технологического бюро через стандартную сеть, включая поддержку стандартных (в том числе распределенных) баз данных:
- встроенная функция трехмерной коррекции траектории движения инструмента на величину его радиуса;
- возможность интеграции с CAM-сервером для выполнения полноценной коррекции УП по результатам предыдущих операций (в том числе трёхмерной коррекции траектории движения инструмента на величину его радиуса);
- привязка набора управляющих программ, подпрограмм, корректоров, параметров системы и служебной информации к конкретному изделию (проекту);
- возможность параллельно с процессом обработки выполнять редактирование или эмуляцию работы другой управляющей программы, ввод управляющей программы с дискеты (в том числе с использованием многотомных архивов), доступ к сети, включая обращение к CAM-серверу;
- возможность автоматизированного измерения (или поиска) баз заготовки (детали), контроля размеров детали и инструмента.
4. С целью увеличения коэффициента загрузки оборудования в условиях единичного и мелкосерийного производства – возможность работы совместно с системой управления верхнего уровня на основе стандартных сетевых технологий, возможность информационной поддержки систем планирования и диспетчеризации на уровне цеха или участка.
5. С целью повышения надежности системы – повышение ресурса узлов ЧПУ за счет применения отлаженных серийных модулей (плат), применение вместо традиционных реле высоконадежных твердотельных силовых модулей (с гальванической изоляцией прочностью не менее 1500 В) и оптоэлектронных датчиков положения.
6. С целью увеличения ремонтопригодности и уменьшения времени поиска неисправностей – наглядное представление сигналов электроавтоматики в соответствии с электрической схемой станка и приведенными в техническом описании алгоритмами работы:
- наличие подсистемы диагностики и выдачи сообщений оператору;
- возможность непосредственного управления исполнительными устройствами;
- конфигурирование ЧПУ из стандартных узлов, из которых также могут быть построены системы управления другим оборудованием завода, и с использованием по возможности стандартного базового программного обеспечения.
7. С целью обеспечения гибкости системы – возможность постоянной доработки системы ЧПУ в соответствии с непрерывно растущими требованиями современного производства:
- возможность быстрой адаптации к любому технологическому оборудованию (в том числе не металлорежущему);
- возможность интеграции со сложными автономными системами (например, с системами технического зрения);
- возможность выполнения необходимых измерений и обмера детали-прототипа с целью создания трехмерной математической модели или построения управляющей программы для копирования;
- наличие гибкой архитектуры системы, реализуемой в зависимости от поставленной задачи;
- надежная поддержка фирмой-разработчиком и обновление версий базового программного обеспечения.
Технология работы на оборудовании с четырьмя и более управляемыми осями на данный момент не достаточно хорошо отработана. Это связано с особенностями систем ЧПУ у каждого производителя, собственным набором и направлением дополнительных осей координат, типом станка и его назначением.
Системы ЧПУ у такого оборудования чаще всего обладают развитой системой программирования, которая может быть реализована на базе языка программирования высокого уровня. Примером может служить система ЧПУ фирмы Siemens со встроенным языком программирования Sinumerik.
Применение станков с ЧПУ в сравнении с обычным оборудованием создает ряд технико-экономических преимуществ.
Производительность этих станков выше производительности станков того же типа, но без программного управления, в три раза, потребность же в производственных площадях в три раза меньше. Значительно вырастает производительность труда у рабочих.
Большой эффект дают станки с ЧПУ при выполнении особо сложных операций, поэтому с их использованием высвобождаются высококвалифицированные рабочие, а также резко сокращаются затраты на технологическую подготовку производства, эксплуатацию инструмента, содержание контролеров отдела технического контроля.
Главный эффект программного оборудования заключается в увеличении до 80-90% работы оборудования (15-20% у обычных станков). Обусловлено это тем, что резко сокращается вспомогательное время, время на смену инструмента и переналадку оборудования.
Переналадка станков в этом случае заключается в замене программы, записанной на магнитной ленте или другом программном носителе, а в ряде случаев в замене инструментов. Широкий диапазон работ, выполняемых станками с ЧПУ, делает их особенно ценными в единичном и мелкосерийном производстве, а также на предприятиях, выпускающих сложную продукцию. Имеется опыт включения станков с программным управлением в поточные линии на предприятиях серийного и массового производства.
В современных условиях широко распространяется такой вид программного оборудования, как обрабатывающие центры. Они представляют собой многооперационные станки с автоматической сменой инструмента. По мнению специалистов, обрабатывающие центры по своей производительности эквивалентны 3-4 станкам с ЧПУ и 8-12 обычным станкам. При условии правильного выбора и рациональной эксплуатации затраты на приобретение обрабатывающих центров окупаются за 3-4 года.
Для эффективного использования станков с ЧПУ необходимо создать систему организованного обеспечения. Она должна представлять собой комплекс взаимодействующих мероприятий, подчиненных основной задаче - изготовлению деталей высокого качества в намеченные сроки при минимальных затратах труда и себестоимости. Система организации работ должна включать технико-экономическое обоснование применения станков с ЧПУ, номенклатуру деталей для обработки на станках, специальную структуру системы, надлежащее обслуживание станков, автоматизированную разработку управляющих программ. Одним из условий достижения высоких экономических показателей эксплуатации станков с ЧПУ является формирование целесообразной номенклатуры обрабатываемых деталей. Практика эксплуатации станков с ЧПУ показала, что эффективная их работа возможна при построении специальной организационной структуры, сориентированной на изменения, которые вносит появление в парке оборудования станков с ЧПУ. Такая структура должна включать производственные цехи и участки, подразделения экономического обслуживания, специализированную технологическую службу. Опыт отечественных и зарубежных предприятий свидетельствует о целесообразности установки станков с ЧПУ в одном производственном помещении, создание специализированных цехов и участков. Расположение станков в одном помещении создает условия для более качественного их обслуживания, многостаночного обслуживания, улучшения планирования и контроля за работой оборудования и т. п.
Похожие работы
... и станции механизма уравновешивания, л/мин Г48–83 10…45 10…30 26 2.4 Техническое описание УЧПУ 2Р22 Назначение Устройство числового программного управления 2Р22 предназначено для управления металлообрабатывающими станками. По защищенности от воздействия окружающей среды, устройство предназначено для работы в механических цехах машиностроительных заводов в ...
... -экономическое сравнение двух вариантов технологического процесса На основе информации, предоставленной в базовом и предлагаемом вариантах технологических процессов, осуществляем их технико-экономическое сравнение, руководствуясь методикой, изложенной в пособии [51, с.95-120] Механическая обработка детали типа «Фланец» переводится с горизонтально-фрезерного станка 6Р82 на фрезерный станок с ЧПУ ...
... полномочий. Оперативность структуры означает возможность реакции системы на изменения обстановки, временные показатели этой реакции и ее цену. Типичным примером организации как сложной системы является производственно-экономическая система (ПЭС). Основным видом производственно-экономических систем является предприятие. Приведем, применительно к промышленному предприятию, некоторые необходимые ...
... позволяющих вести такое программирование []. Компьютерные УЧПУ к этим станкам содержат ПО, включающее 3D CAD / CAM систему, систему автопрограммирования и систему автотехнолога. Комбинация технологии и программного обеспечения позволяет УЧПУ напрямую использовать геометрическое определение детали как программу и исключает этап постпроцессора в цикле работ по подготовке станочных УП. Модель в 3D ...
0 комментариев