Навигация
Рассчет параметров электропривода
10472
знака
1
таблица
4
изображения
ЗАДАНИЕ
1. Рассчитать параметры электропривода (постоянные времени, коэффициенты усиления, коэффициенты обратных связей и т.д.).
2. Представить структурную схему двухконтурной системы подчиненного управления двигателем постоянного тока с параллельным возбуждением с регуляторами тока и скорости.
3. Рассчитать регулятор тока согласно с модульным оптимумом и выбрать его элементы (резисторы и конденсаторы), представить структурную схему контура тока, регулятора тока и схему его реализации. Выбрать датчик тока.
4. Рассчитать регулятор скорости и выбрать его элементы (резисторы и конденсаторы). Представить структурную схему контура скорости, регулятора скорости и схему его реализации. Выбрать датчик скорости. Для парных вариантов регулятор скорости настроить на модульный оптимум, а для непарных - на симметричный.
Содержание
Введение
1. Данные двигателя
2. Расчет параметров электропривода
3. Структурная схема системы подчиненного управления
4. Расчет регулятора тока
5. Расчет регулятора скорости
Выводы
Список используемой литературы
ВВЕДЕНИЕ
Системы подчиненного регулирования с последовательной коррекцией обладают большими возможностями по формированию оптимальных переходных процессов пуска и торможения электроприводов. В таких системах легко реализуется, например, ограничение регулируемых переменных (координат) и их производных.
Кроме ограничения координат в системах подчиненного регулирования часто возникает необходимость ограничения их производных. Например, в двухконтурной системе регулирования скорости и тока якоря в ряде случаев требуется ограничение ускорения или производной тока.
Ограничение ускорения может быть осуществлено различными способами. При одном из них в системе предусматривают контур регулирования ускорения как самостоятельного параметра с использованием общих приемов оптимизации.
Чтобы ограничить производную тока якоря двигателя, также применяют различные способы. Поскольку в системе с оптимизированным по быстродействию контуром тока максимальное значение производной тока зависит от постоянной времени интегрирования контура и заданного значения стопорного тока, одним из способов ограничения производной тока может быть настройка регулятора тока.
1. Данные двигателя
Из справочника [1] взяты данные двигателя постоянного тока независимого возбуждения со стабилизирующей обмоткой быстроходного исполнения
Д22:
Номинальная мощность – 110, кВт
Номинальное напряжение - 440 В;
Номинальный ток - 565 А;
Номинальная скорость - 500 об/мин;
Перегрузочная способность - 2;
Сопротивление якорной обмотки - 0,0805Ом;
Сопротивление стабилизирующей обмотки – 0,002 Ом;
Маховой момент – 10,25 кГм;
Постоянная времени тиристорного преобразователя - 0.005с
2. Расчет параметров электропривода
Определим постоянные времени, коэффициенты усиления и другие параметры системы подчиненного управления, в которую входят регуляторы тока и скорости, тиристорный преобразователь, двигатель и датчики обратных связей.
2.1 Коэффициент усиление тиристорного преобразователя

где Uнтп - номинальное напряжение тиристорного преобразователя, который выбирается из условия обеспечения напряжения и тока, не меньше чем номинальное напряжение и ток двигателя. В нашем случае выбираем тиристорный преобразователь ТУ 16-530 242-72 с номинальным напряжением 220В.
2.2 Определим параметры тиристорного преобразователя. Будем считать его апериодическим звеном с передаточной функцией
![]()
где р - оператор Лапласа.
2.3 Полное сопротивление якорной цепи состоит из сопротивления якоря и сопротивления стабилизирующей обмотки
Re=Ra+ Rcm = 0.0805 + 0.002 = 0.0825 Ом
2.4 Потокосцепление двигателя
![]()
2.5 Полный момент инерции системы электропривода:
![]()
2.6 Электромеханическая постоянная времени
![]()
2.7 Индуктивность якорного цепи двигателя по формуле Уманского-Лиунвиля
![]()
2.8 Электромагнитная постоянная времени системы электропривода
![]() 2.9
2.9
2.9 Коэффициент обратной связи по току

2.10 Коэффициент обратной связи по скорости
![]()
3. Структурная схема системы подчиненного управления
Составим структурную схему двухконтурной системы подчиненного управления с контурами тока и скорости. Используем при этом такие допущения:
1) Тиристорний преобразователь является инерционным звеном;
2) Датчик скорости (тахогенератор) безинерционный и является пропорциональным звеном;
3) Датчик тока также является пропорциональным звеном;
4) Двигатель состоит из электромагнитной и электромеханической частей,
которые являются инерционной и интегрирующей соответственно;
5) При моделировании двигателя не учитываем реакцию якоря, гистерезис,
вихревой ток.
На рис. 1 представлена структурная схема с учетом этих допущений.
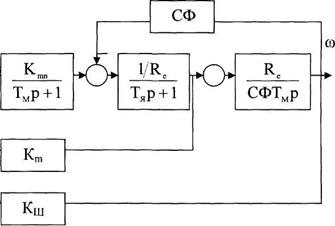
Рисунок 1 - Структурная схема подчиненной системы управления электропривода
На схеме использованы такие обозначения: WpT и Wpui - передаточные функции регулятора тока и регулятора скорости соответственно.
Похожие работы
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
... , Кмат =35 %; К – коэффициент перевода восстановительной стоимости в ценах на 01.01.2000 г., К=6,776. Таблица 5.1 – Локальная смета на приобретение и монтаж лабораторного стенда «Исследование высокомоментного двигателя» Сметная стоимость 1620,7 рублей В том числе: оборудование 867,2 рублей монтажные работы: 482,9 рублей сметная заработная плата: 270,57 ...

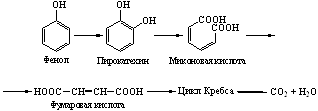
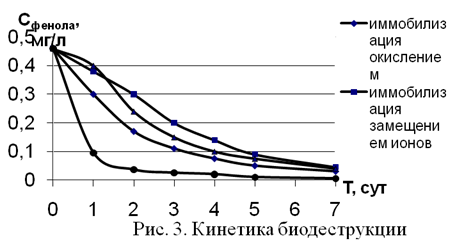
... экспериментов показали, что удельная скорость окисления фенола составляет 0,2 мг/(л*сут), а нефтепродуктов –4.9 мг/(л*сут). Удельные массовые скорости окисления будут равны: Эти параметры были в дальнейшем использованы для проектирования промышленного аппарата для очистки сточных вод. 3. Разработка технологической схемы очистки В ходе эксплуатации лабораторной установки (см. ...
... снизить вероятность возникновения пожаров на данном объекте. ЗАКЛЮЧЕНИЕ С целью обеспечения безопасности движения речного транспорта в камере шлюза Усть-Каменогорской гидроэлектростанции в данном дипломном проекте была разработана радиолокационная станция обнаружения надводных целей, она гораздо эффективнее, чем, например система видео наблюдения. Были рассчитаны основные тактико- ...
0 комментариев