Навигация
Связь биомеханики с другими науками
49702
знака
0
таблиц
0
изображений
14. Связь биомеханики с другими науками
Биомеханика как одна из биологических наук нового типа начинает сближаться по методам исследования с точными науками. Общая биомеханика как раздел биофизики, включающая изучение внутриорганизменных биосистем, возникла на стыке физико-математических и биологических областей знания. Успехи этих наук, использование идей и подходов кибернетики, а также научно-технический прогресс так или иначе сказываются на развитии биомеханики. В свою очередь, эти науки обогащаются данными биомеханики о физике живого. В биомеханических исследованиях применяются методы этих смежных наук; в то же время в исследованиях их проблем могут применяться биомеханические методы. Здесь налицо двусторонняя связь, обеспечивающая взаимное обогащение теории и методов исследования.
Несколько иначе связана биомеханика с отраслями знания, в которых изучаются конкретные области прикладной двигательной деятельности. Так, развивающаяся инженерная биомеханика смыкается с бионикой, инженерной психологией («человек и машина»), связана с разработкой роботов, манипуляторов и других технических устройств, умножающих возможности человека в труде. Медицинская биомеханика дает обоснование ряду методов протезирования, протезостроения, травматологии, ортопедии, лечебной физической культуры. В космической медицине решаются задачи подготовки космонавтов, обеспечения их работоспособности в условиях невесомости, а также двигательных действий в космосе. Биомеханика как бы обслуживает эти области деятельности в процессе решения их прикладных задач.
Методы и законы биомеханики спорта используются также для совершенствования теории и методики физического воспитания, врачебного контроля, спортивно-педагогических и других дисциплин, решающих свои конкретные задачи в области физического воспитания.
15. Сила и момент силы
Сила – это мера механического действия одного тела на другое Численно она определяется произведением массы тела на его ускорение, вызванное данной силой:
Измерение силы, так же как и массы, основано на втором закон! Ньютона. Сила, приложенная к данному телу, вызывает его ускорение Источником силы служит другое тело; следовательно, взаимодействуют два тела. Таким образом, имеется «действие» второго тела на первое и «противодействие» первого тела, приложенное ко второму; Поскольку действие и противодействие приложены к разным телам их нельзя складывать, заменять равнодействующей.
Момент силы – это мера вращающего действия силы на тело; он определяется произведением модуля силы на ее плечо. Момент силы считают положительным, когда сила вызывает поворот тела против часовой стрелки, и отрицательным при повороте тела по часовой стрелке (со стороны наблюдателя).
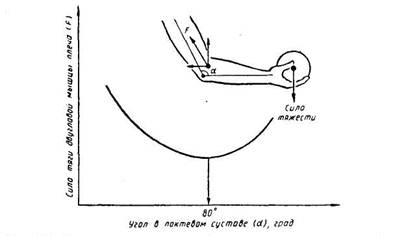
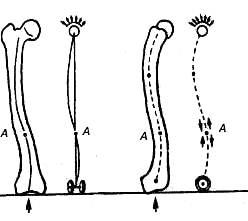
Момент силы – величина векторная: сила проявляет свое вращающее действие, когда она приложена на ее плече (рис. 8, а). Иначе! говоря, линия действия силы не должна проходить через ось вращения. Если сила лежит не в плоскости, перпендикулярной к оси, находят составляющую силы, лежащую в этой плоскости (рис. 8, б); она и вызывает момент силы относительно оси. Остальные составляющие на него не влияют. Понятно, что сила, совпадающая с осью или параллельная ей, также не имеет плеча относительно оси, а следовательно, нет и ее момента.
16. Импульс силы
Импульс силы – это мера воздействия силы на тело за данный промежуток времени (в поступательном движении). За конечный промежуток времени он равен определенному интегралу от элементарного импульса силы, где пределами интегрирования являются моменты начала и конца промежутка времени действия силы:
В случае одновременного действия нескольких сил сумма их импульсов равна импульсу их равнодействующей за то же время. Любая сила, приложенная даже в доли секунды (например, при отталкивании коньком от льда), имеет импульс (рис. 9).
Во вращательном движении момент силы, действуя в течение определенного времени, создает импульс момента силы., Импульс момента силы – это мера воздействия момента силы относительно данной оси за данный промежуток времени (во вращательном движении).
17. Соединение звеньев тела
Соединенные два соседних звена тела образуют пару, а пары, в свою очередь, соединены в цепи.
Биокинематическая пара – это подвижное (кинематическое) соединение двух костных звеньев, в котором возможности движений определяются его строением и управляющим воздействием мышц. В технических механизмах соединения двух звеньев – кинематические пары – устроены обычно так, что возможны лишь вполне определенные, заранее заданные движения. Одни возможности не ограничены (их характеризуют степени свободы движения), другие полностью ограничены (их характеризуют степени связи).
Различают связи: а) геометрические (постоянные препятствия перемещению в каком-либо направлении, например костное ограничение в суставе) и б) кинематические (ограничение скорости, например мышцей-антагонистом).
В биокинематичеких парах имеются постоянные степени связи, которые определяют собой сколько как максимум и каких остается степеней свободы движения. Почти все биокинематические пары в основном вращательные (шарнирные); немногие допускают чисто поступательное скольжение звеньев относительно друг друга и лишь одна пара (голеностопный сустав) – винтовое движение.
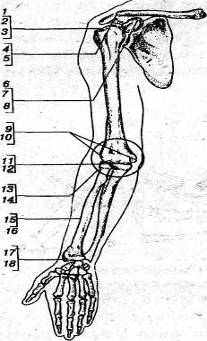
Биокинематическая цепь – это последовательное либо незамкнутое (разветвленное), либо замкнутое соединение ряда биокинематических пар (рис. 10, а).
В незамкнутых цепях имеется свободное (конечное) звено, входящее лишь в одну пару. В замкнутых цепях нет свободного конечного звена, каждое звено входит в две пары.
В незамкнутой цепи, следовательно, возможны изолированные движения в каждом отдельно взятом суставе. В двигательных действиях движения в незамкнутых цепях происходят обычно одновременно во многих суставах, но возможность изолированного движения не исключена.
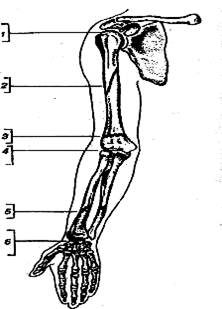
В замкнутой цепи изолированные движения в одном суставе невозможны: в движение неизбежно одновременно вовлекаются и другие соединения (рис. 10, б).
Значительная часть незамкнутых биокинематических цепей оснащена многосуставными мышцами. Поэтому движения в одних суставах через такие мышцы бывают связаны с движениями в соседних суставах. Однако при точном управлении движениями во многих случаях эту взаимную связь можно преодолеть, «выключить». В замкнутых же цепях связь непреодолима и действия мышц обязательно передаются на отдаленные суставы.
Незамкнутая цепь может стать замкнутой, если конечное свободное звено получит связь (опора, захват) с другим звеном цепи (непосредственно или через какое-либо тело).
Похожие работы

... , Н.А. Бернштейн выдвинул положение о кольцевом характере процессов управления. Его гипотеза об уровневом построении движений сыграла важную роль в дальнейшей разработке физиологического направления в биомеханике. Глубокое изучение действительных явлений в самом опорно-двигательном аппарате вызвало особое внимание к управлению движениями. Выявленные особенности управления движениями показали, ...
... и т.д. Третий - отсутствие специализированного подразделения (НИИ, Центр и т.д.), в функции которого входили бы: а) разработка концепции и программы информатизации отрасли; б) контроль за выполнением заказов КГФТ РФ по информатизации; в) разработка новых информационных технологий для ФКиС; г) внедрение ИТ в сфере ФКиС и обучение сотрудников отрасли; д) освоение новых достижений информатики; е) ...
... : · воздействие «клещей мыщелков» на передний рог при выпрямлении из положения на носках; · прочное волокнистое сплетение медиального мениска с медиальной боковой связкой; · патологические образования — такие, как дискоидный мениск и ганглии; · относительно хорошее состояние кровоснабжения околокапсульной зоны, в то время как свободный край мениска, ...
... психики - целеполагание - была поставлена в позицию "от человека" и тем самым в эту же позицию были поставлены функции реализации и становления индивидуальности. Так, на наш взгляд, развивались начала антропоцентрической биомеханики - от точного, подлинного описания сложнейших двигательных ансамблей - к широкому интегрированному представлению о свойствах человека как индивидуальности. Эти начала ...
0 комментариев