Сбор и обработка измерительной информации
Полученные в аналоговой форме координатные и энергетический сигналы нуждаются в дополнительной коррекции. Координатные сигналы требуют введения поправок, учитывающих систематические линейные искажения, а энергетические – поправок на неравномерность чувствительности детектора. Кроме того, Z-сигналы должны пройти амплитудную селекцию и отбор сигналов, попавших в заданное энергетическое окно, для формирования команд для ввода информации. К задачам сбора и обработки можно также отнести сбор информации о характеристиках ФЭУ (спектрах) с целью их последующей коррекции в случае необходимости. Все эти задачи решаются с помощью блока управления и обработки (БОУ). Это название достаточно условно, так как управляющие функции выполняют и другие узлы, например, блок управления приводами. В основном данный блок выполняет задачи коррекции систематических искажений сигналов, подготовку и выдачу измерительной информации для ЭВМ, а также очень важную функцию коррекции режимов ФЭУ, обеспечивающую выравнивание их коэффициентов усиления. Структурная схема этого блока приведена на рис.1.
Территориально этот блок расположен в нижней части 6 аппарата. Сюда поступают аналоговые координатные и энергетические сигналы из блока детектора и преобразуются в цифровую форму с помощью трех АЦП. В выпускаемой модели ГКС-301Т коррекция осуществляется смешанным способом – цифровым и аналоговым, и, в конечном итоге, измерительные сигналы в ЭВМ поступают в аналоговом виде, где они, естественно, снова преобразуются в цифровую форму. Эта особенность преобразования еще будет обсуждаться.
Анализатор спектра, или амплитудный селектор, регистрирует импульсы, попадающие в установленное энергетическое окно, и вырабатывает логические сигналы, управляющие различными узлами. Некоторые из них используются также в качестве командных при вводе аналоговых измерительных сигналов в ЭВМ. Анализатор спектра проектируется с учетом возможности использования радионуклидов с различными энергиями g-квантов. Наиболее сложным и важным узлом БОУ является система автоматического накопления и стабилизации (САНС), которая служит для установки и периодической коррекции режимов ФЭУ.
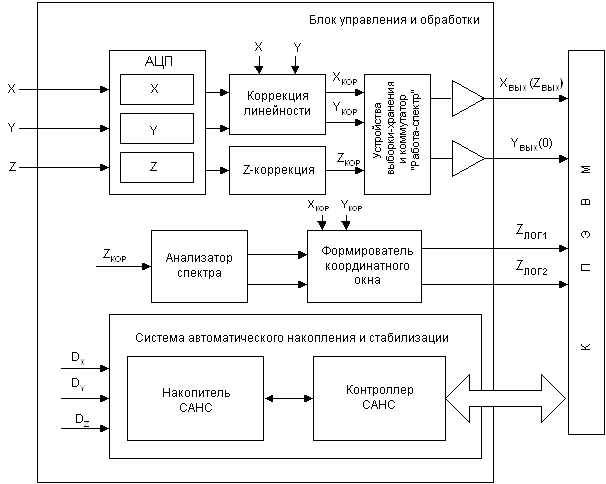 |
Рисунок 1. Структурная схема блока обработки и управления
Эта система в значительной мере автономна. Ее работа протекает в основном под управлением собственного контроллера, и только на стадии математической обработки результатов, полученных в системе, используется ЭВМ. Поскольку запуску в эксплуатацию комплекса ЭКТ предшествует его настройка, в которой важнейшую роль играет САНС, изучение блока обработки и управления начнем именно с этой системы.
Напомним, что выходные сигналы в гамма-камере формируются из линейных комбинаций сигналов всех ФЭУ. Изменение коэффициентов усиления ФЭУ приводит к пропорциональному изменению их сигналов, а значит, и общего сигнала гамма-камеры. Эту зависимость можно записать в виде системы уравнений![]()
![]() ,
,
![]() , (1)
, (1)
. . . . . . . . . . . . .
![]() ,
,
где ![]() – сигнал на входе к-го ФЭУ от вспышки в i-й точке отсчета с известными координатами; Gi– коэффициент усиления i-го ФЭУ; Zк – общий выходной сигнал от вспышки в i-й точке. Все величины в системе (1) могут быть представлены в относительных единицах.
– сигнал на входе к-го ФЭУ от вспышки в i-й точке отсчета с известными координатами; Gi– коэффициент усиления i-го ФЭУ; Zк – общий выходной сигнал от вспышки в i-й точке. Все величины в системе (1) могут быть представлены в относительных единицах.
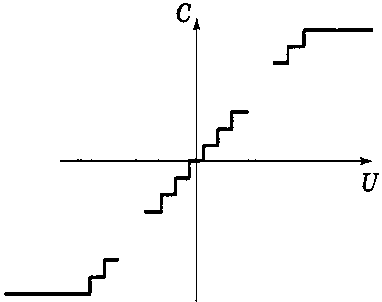
Вклады ![]() отдельных ФЭУ определяют во время предварительной настройки. Для этого набирают спектр детектора в известной точке поверхности. Спектр получают, перемещая энергетическое окно вдоль диапазона энергий и подсчитывая число вспышек за определенный интервал времени в каждом положении окна. Типичный вид спектра детектора с коллиматором показан на рис.2. При низких энергиях наблюдается подъем за счет шумов и фонового излучения, затем – небольшой пик, обусловленный вторичным излучением свинца коллиматора (его называют переизлучением) и основной фотопик. Вклад отдельных ФЭУ в общий сигнал определяют, поочередно отключая их от источника питания. При этом происходит смещение фотопика влево (тонкая линия). Величина смещения DА и является мерой вклада ФЭУ. Из этих величин составляют файл, который хранится в памяти ЭВМ и используется при решении системы (1). Эту систему можно записать в матричном виде
отдельных ФЭУ определяют во время предварительной настройки. Для этого набирают спектр детектора в известной точке поверхности. Спектр получают, перемещая энергетическое окно вдоль диапазона энергий и подсчитывая число вспышек за определенный интервал времени в каждом положении окна. Типичный вид спектра детектора с коллиматором показан на рис.2. При низких энергиях наблюдается подъем за счет шумов и фонового излучения, затем – небольшой пик, обусловленный вторичным излучением свинца коллиматора (его называют переизлучением) и основной фотопик. Вклад отдельных ФЭУ в общий сигнал определяют, поочередно отключая их от источника питания. При этом происходит смещение фотопика влево (тонкая линия). Величина смещения DА и является мерой вклада ФЭУ. Из этих величин составляют файл, который хранится в памяти ЭВМ и используется при решении системы (1). Эту систему можно записать в матричном виде
С´G = Z ,
где С – матрица вкладов ФЭУ в точках сцинтилляций с известными координатами, Z – вектор общих сигналов для тех же точек, G – вектор коэффициентов усиления. Решая это уравнение относительно G, получим
G = C-1Z .
Решение этого матричного уравнения занимает много времени и требует большого объема памяти. Поэтому оно выполняется в ЭВМ, куда после накопления спектра засылаются исходные данные – С и Z .
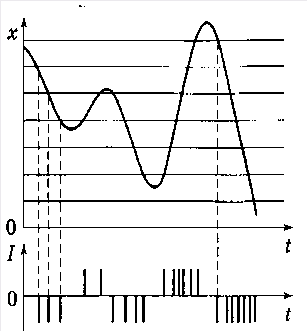
Рассмотрим, как формируется спектр с помощью структурной схемы накопителя САНС (рис.3). В режиме автоматической настройки детектор облучается точечным источником, расположенным на некотором расстоянии от поверхности детектора.
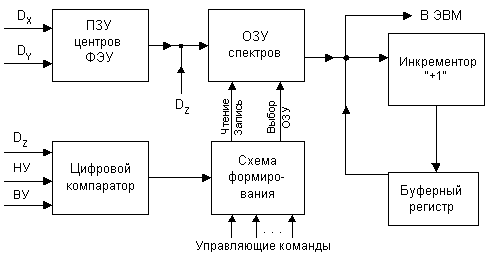 |
Рисунок 3. Накопитель спектра САНС.
Собственно спектры ФЭУ накапливаются в ОЗУ, общий объем памяти которого разбит на несколько областей по количеству ФЭУ. В свою очередь, каждая область содержит несколько ячеек (128 – 256), в которых содержатся отсчеты спектра данного ФЭУ. Адреса ОЗУ составляются из выходных данных специального ПЗУ и нескольких старших разрядов Z-сигнала DZ. В ПЗУ записаны номера ФЭУ, которые извлекают, используя в качестве адресов цифровые координаты DXи DY (несколько старших разрядов). Номер каждого ФЭУ в ПЗУ занимает некоторую зону. Соответственно имеется определенный диапазон координат DXи DY, попадающих в данную зону. Таким образом, задается адрес области, занимаемой некоторым ФЭУ, и ячейки в этой области с известной энергией импульса. Теперь остается записать в эту ячейку единицу. Это делается с помощью цифрового компаратора.
Контроллер САНС формирует некоторое энергетическое окно неизменной ширины. Оно задается верхним и нижним уровнями, которые поступают на цифровой компаратор. Окно перемещается вдоль диапазона энергий. На вход сравнения компаратора подаются те же разряды Z-сигнала, которые используются для адресации ОЗУ. Когда Z-сигнал попадает в энергетическое окно, компаратор выдает сигнал чтения/записи ОЗУ и ряд других управляющих сигналов. По этим командам из ОЗУ по установленному адресу вызывается ячейка памяти, к содержимому которой в инкременторе добавляется единица. Затем новое значение через буферный регистр снова записывается в ту же самую ячейку. Этот процесс и представляет собой накопления спектра. В качестве инкрементора можно использовать сумматор или счетчик с входами параллельной загрузки.
По завершении процесса накопления содержимое ОЗУ через последовательный интерфейс (например, стандартный интерфейс RSC-232) пересылается в ЭВМ, где производится решение уравнений (1). Результатом этого решения будут коэффициенты усиления ФЭУ. Их представляют в относительных единицах (процентах) и сравнивают с коэффициентом усиления реперного канала, принимаемым условно за 100% (канал 100). Если коэффициент усиления какого-либо канала существенно отличается от реперного, его корректируют, и возвращают новое значение в регистр ЦАП, управляющего режимом данного ФЭУ. Циклы накопления и коррекции коэффициентов усиления продолжаются до тех пор, пока отличия коэффициентов усиления ФЭУ от реперного канала не станут приемлемыми. Для наглядности ход настройки отображают на экране монитора ЭВМ в виде матрицы ФЭУ, где в кружках указывают относительную величину коэффициента усиления.
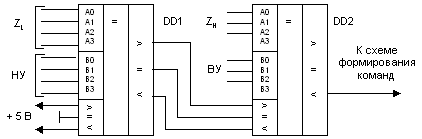
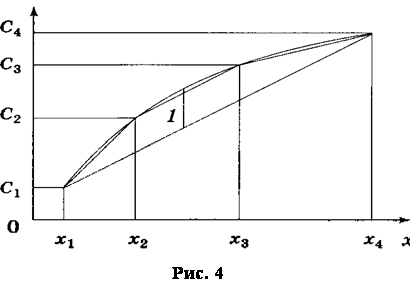
Для лучшего понимания цифровой амплитудной селекции полезно более подробно остановиться на некоторых особенностях цифрового компаратора. Его можно построить на двух микросхемах, например, К555СП1. Эти микросхемы представляют собой компараторы, сравнивающие два четырехразрядных числа А и В, и выдающие сигналы низкого уровня на трех выходах соответственно при выполнении условий A > B, A = B и A < B. Эти микросхемы имеют входы для наращивания, благодаря чему можно увеличивать разрядность сравниваемых чисел. Соединение микросхем в амплитудном селекторе показано на рис.4.
На компаратор DD1 подаются младшие разряды Z-сигнала ZL и код нижнего уровня НУ, а на DD2 – старшие разряды Z-сигнала и код верхнего уровня ВУ. Если Z-сигнал попадает в окно, т. е. он больше НУ и меньше ВУ, то вначале компаратор DD1 выдаст сигнал на выходе « > », а затем DD2 продолжит сравнение и выдаст сигнал на выходе « < », который поступит в схему формирования управляющих команд.
|
Если же Z-сигнал не попадает в окно (Z < НУ или Z > ВУ), то сигнал на выходе «<» DD2 не появляется. При использовании в качестве разрядов ВУ разрядов Z11, Z10 и Z9, а для формирования НУ – разрядов Z8, Z7, Z6, Z5 энергетического сигнала диапазон изменения ВУ будет лежать в пределах 512 – 2048, а диапазон НУ – в пределах 32 – 256.
Достаточно длительный опыт эксплуатации ЭКТ показал, что настроенная детекторная система долгое время сохраняет свои основные параметры в допустимом диапазоне. Поэтому к «услугам» САНС приходится прибегать сравнительно редко (не более двух раз в год). По этим причинам обычно не используется и режим стабилизации, который занимает довольно много рабочего времени.
Рассмотрим теперь рабочий режим, когда в ЭВМ передаются сигналы для формирования изображения. Для этого используются первичные координатные и энергетический сигналы. Однако, прежде, чем попасть в ЭВМ, они проходят довольно сложный путь дополнительной коррекции. Как уже говорилось, эти поправки зависят от координат сцинтилляций и заранее известны. Поскольку поправки нужно вводить в реальном масштабе времени, т. е. немедленно, то эти преобразования выполняют аппаратными средствами (с такой проблемой мы встречались еще при изучении УЗ сканеров). Следовательно, поправочные коэффициенты, с помощью которых вычисляются сами поправки, должны храниться в ПЗУ, а первичные аналоговые сигналы – преобразовываться в цифровую форму.
Дальнейший путь преобразований зависит от типа и характеристик доступной для разработчика и производства элементной базы. В связи с этим надо еще раз заметить, что требуемая скорость передачи сигналов в ЭВМ весьма высока – она достигает 200000 импульсов (байт или слов при цифровой связи) за секунду. Так как эти сигналы приходится передавать на достаточно большое расстояние (несколько метров), то возникают определенные технические трудности при их передаче в цифровой форме. В модели ГКС-301Т они передаются в аналоговом виде, а в ЭВМ преобразуются в цифровую форму с помощью встроенных АЦП. Как видим, первичные аналоговые сигналы проходят многоступенчатое преобразование: сначала в цифровую форму (для вычисления поправок, а также для использования в процедуре накопления спектров), затем – снова в аналоговую – для получения скорректированных сигналов и посылки их в ЭВМ, где еще они раз преобразуются в цифровые.
Коррекция линейных искажений заключается в изменении первичных значений координат X, Y на некоторую величину (поправку) DX и DY, которые являются функциями этих же координат. Для этого используют различные аппроксимации, простейшей из которых является билинейная. При такой аппроксимации поправки вычисляются согласно алгоритму
DXi = K1i + K2iXi + K3iYi + K4iXiYi , (2)
DYi = K5i + K6iXi + K7iYi + K8iXiYi ,
где K1i, K2i и т. д. – коэффициенты, которые рассчитывают при настройке при помощи дырчатого фантома; Xi , Yi – младшие разряды координат.
Далее поправки DX и DY суммируют с исходными сигналами и получают скорректированные координаты
Хкор = Х + DХ и Yкор = Y+ DY.
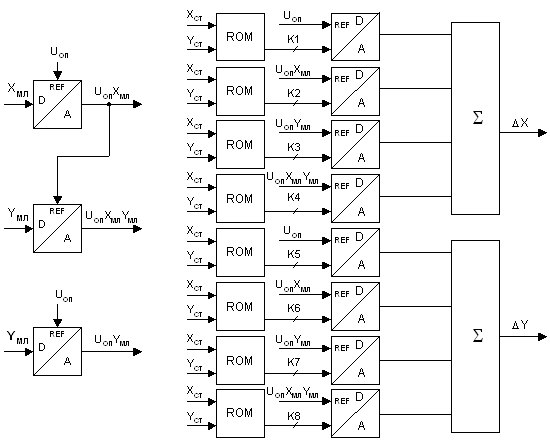
Если эта процедура выполняется в аналоговой форме, то все операнды в уравнениях (2) нужно представить в аналоговом виде. Структурная схема, выполняющая эти преобразования, показана на рис.5.
Первичный аналоговый сигнал Х поступает на УВХ1 и УВХ2 и преобразуется в цифровой код DXс помощью АЦПX. Аналогично преобразуется и сигнал Y. Цифровые координаты DXи DY поступают на входы вычислителя поправок, которые на его выходах появляются в аналоговом виде и суммируются с исходными аналоговыми сигналами. Очевидно, что в вычислителе поправок цифровые данные должны быть преобразованы в аналоговые величины. Структурная схема вычислителя поправок приведена на рис.6.
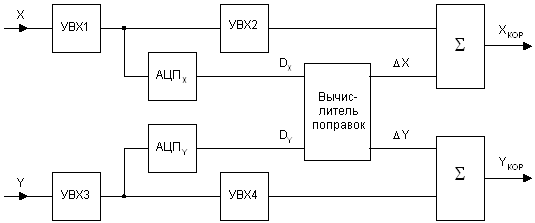 |
Рисунок 5. Структурная схема линейной коррекции координат.
Преобразования в этом блоке выполняются в соответствии с алгоритмом (2). На ПЗУ (по четыре на каждую координату) подаются старшие разряды координат, по которым извлекаются коэффициенты К1, К2 и т. д. Они умножаются в перемножающих ЦАП на аналоговые величины (UОП и др.), причем аналоговые множители, куда входят координатные сигналы и их произведения, формируются с помощью трех отдельных перемножающих ЦАП из младших разрядов и опорных напряжений. Далее отдельные слагаемые суммируют и получают поправку.
Подобным же образом производят и амплитудную коррекцию энергетического сигнала, но по более простому алгоритму
Zкор = Z +DZ, (3)
где DZ = KZZ – поправка, а KZ – коэффициент, являющийся функцией координат. Как и в случае коррекции координат, этот коэффициент хранится
 |
в ПЗУ и извлекается оттуда по координатным сигналам.
Рисунок 6. Вычислитель поправок координатных сигналов.
Амплитудный селектор (анализатор спектра) служит для регистрации попадания Z-импульсов в заданное энергетическое окно, причем таких окон может быть несколько. Это объясняется тем, что программа работы современных ЭКТ, как правило, содержит мультиизотопный режим, т. е. режим, в котором используются несколько (2 – 3) изотопов с разными энергиями g-квантов. Хотя, по правде говоря, это бывает редко. «Многооконная» селекция реализуется с помощью специальных сдвоенных компараторов (рис.7)
Окно задается двумя уровнями напряжений – верхним (ВУ) и нижним (НУ), причем сами эти уровни формируются с помощью ЦАП, которые управляются кодами изотопов. Z-сигнал одновременно поступает на входы компараторов (инвертирующий и не инвертирующий). Выходной сигнал компаратора поступает на логическое устройство, стробируемое импульсами, которые формируются из тех же самых Z-импульсов, но со сдвигом во времени. Сигнал на выходе появляется только в том случае, если Z-импульс находится в пределах окна. Логическое устройство может иметь несколько выходов, сигналы которых используются для управления вводом информации в ЭВМ и при настройке в режиме осциллоскопа. В качестве компаратора можно использовать микросхему К554СА1 и др.
Знакомясь с устройством ЭКТ, мы постоянно отмечаем насыщенность различных блоков аналоговыми аппаратными средствами, особенно это относится к
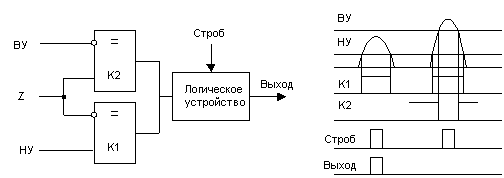 |
Рисунок 7. Амплитудный селектор.
блокам коррекции. АЦП в аппаратной части используются неэффективно – по сути, только для обслуживания адресации ПЗУ с поправочными коэффициентами и для цифровой амплитудной селекции при накоплении спектров. Большое количество ступеней преобразования не может не сказаться на качестве изображения. Разработчики это понимали, но у них не было выбора. Сейчас этот выбор появился в виде новой элементной базы, о которой уже говорилось в главе «Ультразвуковые сканеры». Цифровая элементная база постепенно вытесняет аналоговую и в этой отрасли медицинской интроскопии.
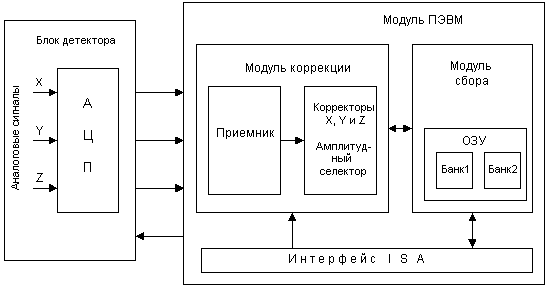 |
В новой модели эмиссионного томографа ОФЭКТ после интегрирования аналоговых сигналов X, Y, Z и аналоговой коррекции энергетической зависимости X и Y преобразования продолжаются только в цифровой форме. Обобщенная структурная схема цифрового канала измерительной информации изображена на рис.8.
Рисунок 8. Канал аппаратной цифровой обработки.
АЦП Х, Y, Z размещаются в модуле детектора в непосредственной близости от аналоговых источников. Это сводит к минимуму примесь всевозможных помех. Вся цифровая аппаратная часть, занятая преобразованием измерительной информации, находится в модуле ПЭВМ. Цифровые сигналы в нее передаются по хорошо защищенным каналам (экранированные кабели или волоконная оптика) помехоустойчивыми кодами, например, с проверкой на четность.
В модуле коррекции по-прежнему производится коррекция, но только цифровая, линейных и энергетических искажений. Для этого используются те же алгоритмы (2) и (3). Они реализуются аппаратными средствами с помощью программируемых логических интегральных схем (ПЛИС), например, серии 10K70RC240-3 фирмы ALTERA, цифровых перемножителях и др. Амплитудная селекция выполняется исключительно цифровыми компараторами.
В модуле сбора в зависимости от выбранного режима производятся накопление спектров или формирование матриц изображения. Для ускорения процесса обмена информацией с ЭВМ внутреннее ОЗУ разбито на две части – банка (Банк1 и Банк2). С таким приемом мы уже неоднократно встречались.
Переход к преимущественно цифровой обработке позволяет существенно улучшить качество изображения. Очередь теперь за расширением доли участия цифровой элементной базы в работе детектора, например цифровая коррекция энергозависимости первичных координатных сигналов и др. Не следует забывать, что для управления режимом ФЭУ требуется большое количество АЦП и их буферных регистров. Применение ПЛИС и специализированных микросхем, содержащих в одном корпусе несколько функционально независимых ЦАП, и здесь позволит уменьшить количество плат и улучшить качество работы системы в целом.
Еще раз перечислим возможности современного эмиссионного томографа. Он может работать как гамма-камера в статическом и динамическом режимах. Изображения, которые при этом получают, по традиции называют сцинтиграммами. В динамическом режиме кроме изображения еще строят график накопления –выведения РФП в исследуемой области, т.е. гамма-камера выполняет еще и функции радиометра.
Сканирование всего тела выполняют с целью выявления метастазов в скелете. При этом изображение тела выводится на весь экран в уменьшенном масштабе. Оно разворачивается по мере сканирования, которое производится очень медленно. Для этого в блоке синхронизации развертки координата линейного перемещения, поступающая от специального датчика, суммируется с одной из координат вспышки (например, Х) в системе координат детектора. Координата Y и смещенная координата Х уменьшаются с одинаковым масштабным коэффициентом и передаются в ЭВМ.
В режиме томографирования детекторная головка обходит по орбите ложе пациента. В процессе ее вращения создается несколько кадров изображения. Эти кадры аналогичны проекциям, получаемым при сканировании рентгеновским компьютерным томографом. Однако в отличие от РКТ из кадров изображения ЭКТ можно реконструировать много сечений различной ориентации, как в магнитно-резонансном томографе.
Похожие работы
... более высоких степеней, если отсчеты достаточно разнесены во времени. Для отдельных областей измерения могут применяться специфичные алгоритмы предварительной обработки, используемые во всех ИИС данной области. Например, при геометрических измерениях измерительный наконечник перемещается по эквидистанте относительно исследуемой поверхности. Эквидистанта — линия (поверхность), все точки которой ...
... решение задачи исследования функций с использованием перечисленных видов неавтоматизированных СИ затруднено. Параллельно с развитием измерительной техники шло интенсивное развитие других важнейших составляющих современного технического прогресса — информационных технологий [19, 38 и др.], являющихся основой автоматизации управления и производства. Информационная технология — совокупность методов ...
... хранение больших массивов измерительной информации. Следствием этого является схожесть структур, обязательное использование ЭВМ и соответствующего ПМО. Заключение В работе рассмотрены примеры измерительных информационных систем для исследования объектов различной физической природы. Литература 1. Автоматизация физических исследований и эксперимента: компьютерные измерения и виртуальные ...
еоценить значение МП и микроЭВМ при создании автоматизированных средств измерений, предназначенных для управления, исследования, контроля и испытаний сложных объектов. Развитие науки и техники требует постоянного совершенствования средств измерительной техники, роль которой неуклонно возрастает. Основные понятия и определения Понятия и определения, используемые в измерительной технике, ...
0 комментариев