Навигация
Алгоритмы сбора и предварительной обработки измерительной информации
40911
знаков
0
таблиц
5
изображений
Содержание
Введение
1. Типовые алгоритмы сбора измерительной информации
2. Введение поправок
3. Сглаживание исходных данных
Выводы
Литература
Введение
Тема контрольной работы "Алгоритмы сбора и предварительной обработки измерительной информации" по дисциплине "Измерительные информационные системы (ИИС)".
Программно-математическое обеспечение ИИС является не менее важным ее компонентом, чем аппаратные средства. Алгоритмы сбора и обработки информации в значительной степени определяются характером решаемых задач, и этому вопросу будут посвящены следующие главы. Однако имеется ряд алгоритмов, которые могут быть общими для различных ИИС.
1. Типовые алгоритмы сбора измерительной информации
Неотъемлемым компонентом алгоритмов сбора первичной измерительной информации является ее дискретизация.
С дискретизацией мы сталкиваемся при сборе исходной информации и при ее обработке. На определенной стадии развития ИИС дискретизация на обоих этапах приводила к погрешностям результатов измерения. При ограниченности средств вычислительной техники того периода погрешность вычисления была сопоставима с аппаратными и методическими погрешностями. Однако возможности современных ЭВМ таковы, что вызываемая ими в процессе дискретизации погрешность не имеет практического значения. Разрядность чисел в ЭВМ всегда намного превышает разрядность вводимой информации. Вычисление, например, интегралов от аналитически заданных функций сводится к вычислениям сумм от дискретных значений этих функций. При этом всегда может быть обеспечена требуемая точность вычислений. Существенно большее влияние имеет дискретизация, связанная с алгоритмом сбора исходной информации и обусловленная характером ИО.
Физические величины, коды которых выдаются измерительным каналом, неизбежно подвергаются дискретизации по уровню. В силу конечности числа разрядов АЦП (п) дискретность воспринимаемой каналом физической величины х равна
![]() (1)
(1)
где X — диапазон возможных изменений величины х.
Характеристика АЦП при правильном округлении приведена на рис. 1.
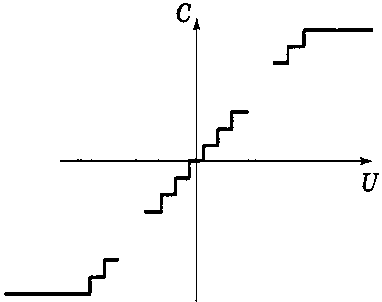
Рис. 1
При округлении в меньшую сторону (отбрасывается вся часть неполной дискреты) характеристика смещается на bх/2 вправо, при округлении в большую сторону — на ту же величину влево.
Дискретизация по уровню приводит к погрешности, имеющей равномерное распределение на интервале длиной bх. Среднее квадратичное отклонение этой погрешности а = = bх/2 √3 , а математическое ожидание равно нулю при правильном округлении в АЦП, равно -bх/2 при округлении в меньшую сторону и bх/2 при округлении в большую сторону. Из сказанного следует, что мы имеем довольно простое универсальное описание погрешностей дискретизации по уровню.
Важной особенностью погрешности дискретизации является независимость ее значений для разных результатов. Это свойство широко используется при моделировании случайных равномерно распределенных чисел. В силу этого свойства при усреднении и других алгоритмах обработки, приводящих к сжатию результатов, влияние этой погрешности существенно уменьшается, и распределение погрешности результата обработки можно считать близким к нормальному.
При малом числе разрядов АЦП погрешность дискретизации может иметь существенное значение, и ее необходимо учитывать при оценке достоверности получаемых результатов. Разрядность АЦП в ИК меньше, чем разрядность чисел в ЭВМ. Тем не менее всегда можно выбрать такую разрядность серийно выпускаемого АЦП, при которой погрешность дискретизации по уровню будет пренебрежимо мала.
Более существенное влияние имеет дискретизация значений аргумента (аргументов) при исследовании функций. Наиболее часто исследуются функции времени, когда несколько или все физические величины, связанные с ИО, зависят от времени. Однако аргументами могут быть пространственные координаты и любые другие физические величины. В этом случае мы сталкиваемся с серьезной методической проблемой — невозможностью измерения функции как единого целого. Мы можем измерить конечное число значений функций для некоторого набора значений аргумента (аргументов). Как правило, соседние значения аргументов отстоят друг от друга на равные интервалы — равномерный шаг дискретизации (квантования) по аргументу. Однако иногда используется и неравномерный шаг дискретизации.
Остановимся на дискретизации по времени.
В этом случае ИК выдают значения исследуемой физической величины xj взятые в моменты времени tj. Естественно, эти отсчеты, представляемые в цифровом виде, квантованы по уровню и в зависимости от скорости изменения исследуемой величины соседние отсчеты могут отличаться друг от друга на несколько дискрет. Из этого следует, что погрешность восстановления функции по ее дискретным отчетам может быть весьма значительной, и она зависит не только от интервалов времени между соседними отсчетами, но и от скорости изменения исследуемой физической величины. В этом случае мы не располагаем столь же простым описанием погрешности дискретизации, которое имеется при дискретизации по уровню. Следует отметить, что задача восстановления функции по ее отсчетам не является обязательной при исследовании функции. Как мы увидим в следующей главе, интересующие нас величины в большинстве случаев могут определяться непосредственно по дискретным отсчетам. Однако анализ погрешностей определения этих величин будет специфичным для каждой конкретной задачи и потребует определенной априорной информации об исследуемой функции.
Рассматривая дискретизацию величины по уровню, мы отмечали, что практически всегда число этих уровней велико, и они близко отстоят друг от друга. При дискретизации по времени моменты отсчетов достаточно далеко отстоят друг от друга. При этом следует иметь в виду, что tj также дискретизированы по уровню. Шаг дискретизации по времени может быть сделан достаточно малым, и он всегда много меньше интервалов времени между соседними отсчетами. Однако эту дискретизацию также следует учитывать. Причем она может оказаться более значительной, если аргументом является не время, а некоторая другая величина.
Погрешность из-за дискретизации аргументов будет тем меньше, чем чаще берутся отсчеты. Очевидными физическими ограничениями частоты отсчетов являются время преобразования АЦП, пропускная способность каналов связи и быстродействие ЭВМ. Эти факторы необходимо учитывать, но не они являются определяющими. Существенно больше влияют инерционность ИО и инерционность ИК, обусловленная инерционностью измерительных преобразователей, как первичных, так и вторичных.
Если объект достаточно инерционен и, следовательно, функции xi(t) достаточно медленные (достаточно низкочастотные), увеличение частоты отсчетов не повысит существенно информативность первичных данных. Можно повысить достоверность этих данных за счет их усреднения, но это повышение также не беспредельно. Этот фактор, не зависящий от свойств ИИС, ограничивает сверху реально необходимую частоту отсчетов.
Точно так же нецелесообразно брать отсчеты с периодом существенно меньшим, чем постоянная времени (время памяти) измерительных преобразователей. Однако эта ситуация принципиально отличается от предыдущей и означает, что задачи выбора частоты дискретизации и обеспечение требуемого быстродействия ИК должны решаться совместно. Медленность исследуемых функций является отражением реальных свойств ИО, а их искажения за счет инерционности ИК и обусловленной этим низкой частотой отсчетов приводит к увеличению аппаратных погрешностей. Поэтому быстродействие ИК должно быть согласовано с возможной скоростью изменения измеряемых величин, и только после этого может выбираться рациональная частота отсчетов.
Соседние отсчеты функции могут существенно отличаться друг от друга, однако их разность по абсолютной величине в среднем меньше абсолютных значений самих отсчетов. Это обстоятельство используется для сжатия данных при их передаче по цифровым каналам связи (разностная модуляция). В этом случае первый отсчет передается полностью, а в последующие моменты передаются разности xj – xj-1 .Очевидно, что такая передача информации менее помехоустойчива, чем передача отсчетов функции, поскольку сбой при передаче одной разности не устраняется при передаче следующих значений. Однако в силу достаточно высокой помехоустойчивости цифровых каналов связи за счет использования помехоустойчивых кодов эта погрешность оказывается достаточно малой. При разностной модуляции значения tj могут быть как равномерными, так и неравномерными.
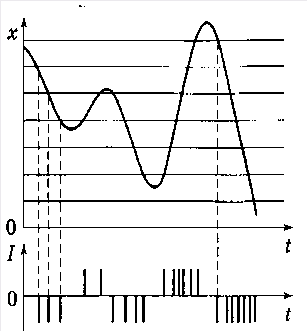
Разновидностью разностной модуляции является дельта-модуляция, которая в принципе предполагает неравномерность моментов отсчетов. Сущность дельта-модуляции состоит в том, что по каналу связи передается один бит информации в момент времени, когда измеряемая величина изменилась по уровню на одну дискрету. Передаваемый бит содержит информации о знаке изменения (рис. 2).
В этом случае отсчеты будут следовать тем чаще, чем больше скорость изменения измеряемой величины. С этой точки зрения дельта-модуляцию можно рассматривать как адаптивную процедуру сбора и передачи данных. При этом разность между дискретным и непрерывным представлениями функции не будет превышать одной дискреты.
Очевидно, что передача данных со сжатием информации требует наличия в ИК вычислительных устройств, определяющих разности и вырабатывающих командные сигналы для передачи данных. Более подробные сведения о разностной модуляции, дельта-модуляции и других способах сжатия данных при их передаче можно найти в [29].
Самый простой алгоритм сбора информации об изменяющихся во времени величинах — считывание по команде с ЭВМ или извне отсчетов со всех ИК. Такой алгоритм применим как для периодических, так и для непериодических отсчетов. Исключение составляет передача информации дельта-модулированным сигналом, когда время отсчета определяется передающим устройством. Если функции xi(t) исследуются независимо друг от друга, то синхронность отсчетов всех функций не важна. Если же эти функции рассматриваются как единое целое, то моменты времени отсчетов должны быть согласованы. При этом может возникнуть необходимость введения поправок, если отсчеты взяты в разные моменты времени. Причиной неодновременности отсчетов может быть конечное время преобразования в АЦП при его работе в мультиплексном режиме, задержки в каналах связи и др.
Теперь остановимся на процедуре сбора первичной информации, когда одна или несколько исследуемых физических величин рассматриваются как функции одной или нескольких других физических величин. Это не всегда означает, что измеряемые физические величины оказались разбиты на два вида: зависимые, присущие непосредственно ИО, и независимые, внешние факторы, влияющие на свойства этого объекта. Например, при исследовании формы поверхностей деталей любая из пространственных координат может рассматриваться как функция двух других координат. Однако все три координаты одинаково описывают свойства исследуемой детали.
При исследовании зависимости сопротивления резистора от температуры сопротивление действительно является свойством ИО, а температура — внешним влияющим фактором. Однако и в этом случае с точки зрения сбора и обработки первичной информации обе физические величины ничем не отличаются. Необходимо измерять температуру самого резистора, а не нагревателя и не окружающей среды. Более того, нагрев можно производить, пропуская через резистор достаточно большой ток, и измерять величину этого тока, падение напряжения на резисторе и его температуру. При этом также следует иметь в виду, что полученная функция зависимости сопротивления от температуры описывает свойства ИО, то есть присуща именно ему.
Из приведенных примеров можно сделать вывод, что при исследовании функциональных зависимостей между измеряемыми физическими величинами их разбиение на аргументы и функции довольно условно, хотя в отдельных случаях измеряемые величины можно разбить на присущие непосредственно объекту и на внешние влияющие факторы. Однако по отношению к алгоритмам сбора и обработки первичной информации это разбиение несущественно.
Для исследования функциональных зависимостей необходима достаточно большая совокупность отсчетов измеряемых физических величин. Желательно, чтобы она охватывала всю область возможных значений величин при реальной эксплуатации объекта. Для сбора этой информации могут использоваться пассивный и активный методы.
При пассивном методе по команде с ЭВМ считываются значения всех физических величин ИО. Естественно, при этом мы получаем только по одному значению каждой величины, чего недостаточно для изучения функций. Получить большее число значений можно либо исследуя однотипные объекты, либо предполагая, что исследуемые величины изменяются во времени, и произведя несколько считываний в разные моменты времени. Пассивный метод мало эффективен и используется только в тех случаях, когда активный метод, предусматривающий воздействие на ИО, физически невозможен. Пассивный метод относительно эффективен при исследовании зависимости физических величин от пространственных координат при использовании так называемых многоточечных систем, когда исследуемые величины измеряются в разных точках пространства. В этом случае для получения достаточно большего объема данных необходимо иметь большое количество однотипных ИК.
При активном методе значения величин, рассматриваемых как аргументы, изменяются путем внешних воздействий на ИО. При исследовании величин, зависящих от пространственных координат, активное воздействие предполагает перемещение первичного преобразователя относительно объекта по одной, двум или трем координатам. При этом, естественно, предполагается, что свойства ИО не изменяются во времени. В зависимости от формы ИО система координат, в которой производится сбор первичной информации и, соответственно, перемещение датчика, может быть декартовой, полярной, цилиндрической или сферической. Обычно одна координата изменяется непрерывно, а другие (одна или две) изменяются дискретно с достаточно большим шагом. Значения непрерывно изменяемой координаты и функции считываются через заданные интервалы перемещения по этой координате или через заданные интервалы времени. Время в этом случае не является аргументом для какой-либо физической величины, а служит вспомогательной переменной. Очевидно, что в этом случае базирующее устройство должно иметь привод, обеспечивающий необходимые перемещения. Такое непрерывное изменение одной из координат в процессе сбора информации иногда называют сканированием. Более часто сканирование используется при бесконтактных методах, восходя к исходному пониманию этого термина в радиолокации.
Технически самой сложной будет ситуация, когда аргументы исследуемых величин не являются ни временем, ни пространственными координатами. В этом случае базирующее устройство должно содержать преобразователи, формирующие по командам с ЭВМ соответствующие воздействия с заданными значениями. Некоторые воздействия, например магнитные или электрические поля, могут изменяться практически мгновенно. В этом случае, как и при изменении пространственных координат, аргументы могут изменяться дискретно или непрерывно. Во втором случае значения аргументов и функций могут считываться с заданным шагом по аргументу или времени. Некоторые аргументы, например температура, влажность, химический состав, требуют для достижения заданного значения определенного времени. В этом случае алгоритм сбора данных может предусматривать непрерывное измерение изменяющегося аргумента в пределах интересующего интервала значений. Изменение необязательно должно быть равномерным во времени, поскольку значения аргумента и значения функции могут фиксироваться с заданным шагом аргумента. Рассмотренные выше алгоритмы сбора первичной информации, за исключением дельта-модуляции, предполагают периодическую выдачу отсчетов измеряемой физической величины. Однако любая регулярная система отсчетов может привести для определенных функций к систематическим погрешностям. Это можно проиллюстрировать простейшим примером. Пусть исследуемая функция — периодическая, целью измерения является определение ее постоянной составляющей а0, а отсчеты берутся с периодом Т0, кратным периоду исследуемого сигнала (рис. 3).
Тогда в зависимости от фазового сдвига между исследуемым сигналом и последовательностью отсчетов систематическая погрешность измерения постоянной составляющей будет лежать в пределах ±А независимо от числа усредняемых отсчетов. Устранить эту систематическую (при фиксированных временных соотношениях) погрешность можно, беря отсчеты в случайные моменты времени tj = jT0 + τj, где τj — независимые случайные величины, равномерно распределенные на интервале [0; Т0]. При этом возникает случайная погрешность, уменьшающаяся с увеличением числа отсчетов. Такая процедура устранения влияния систематических факторов путем искусственного введения случайности в процесс исследования называется рандомизацией. Примеры таких задач можно привести из самых различных областей. В свое время, когда разрядность АЦП не превышала восьми, усредняя несколько последовательных результатов преобразования, путем рандомизации искусственно увеличивали разрядность отсчетов.
В теоретическом плане анализ погрешностей из-за дискретизации функции нескольких аргументов аналогичен анализу погрешностей из-за дискретизации по времени. В общем случае оценить качество дискретизации и принять решение о ее приемлемости можно, рассматривая оценки достоверности решаемых задач для разных методов дискретизации. При этом теоретически или путем моделирования можно сравнивать реализуемые способы дискретизации с идеальными, практически нереализуемыми.
Похожие работы
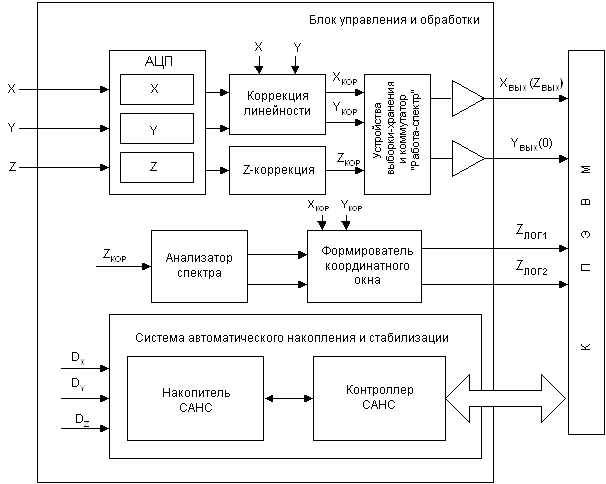
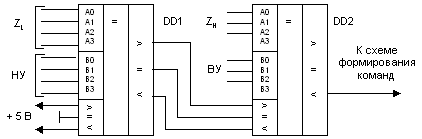
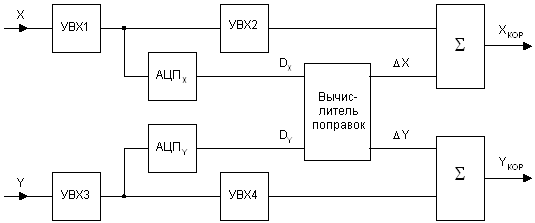
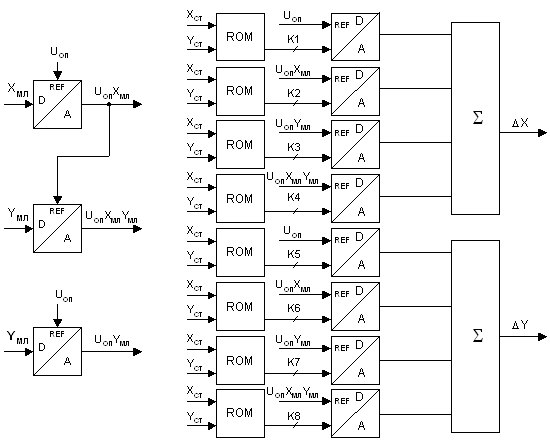
... аналоговой коррекции энергетической зависимости X и Y преобразования продолжаются только в цифровой форме. Обобщенная структурная схема цифрового канала измерительной информации изображена на рис.8. Рисунок 8. Канал аппаратной цифровой обработки. АЦП Х, Y, Z размещаются в модуле детектора в непосредственной близости от аналоговых источников. Это сводит к минимуму примесь всевозможных помех. ...
... проектируется исходя из решаемых задач и технико-экономических ограничений, а затем полученные результаты могут быть отнесены к конкретному классу. Практическая эффективность этой классификации невелика. 2. Общие принципы построения и применения ИИС Создаваемая ИИС должна обеспечивать достижение поставленных перед ней целей. Эти цели могут быть достигнуты различными способами. Поэтому должны ...
... хранение больших массивов измерительной информации. Следствием этого является схожесть структур, обязательное использование ЭВМ и соответствующего ПМО. Заключение В работе рассмотрены примеры измерительных информационных систем для исследования объектов различной физической природы. Литература 1. Автоматизация физических исследований и эксперимента: компьютерные измерения и виртуальные ...
еоценить значение МП и микроЭВМ при создании автоматизированных средств измерений, предназначенных для управления, исследования, контроля и испытаний сложных объектов. Развитие науки и техники требует постоянного совершенствования средств измерительной техники, роль которой неуклонно возрастает. Основные понятия и определения Понятия и определения, используемые в измерительной технике, ...
0 комментариев