Детекторная система ЭКТ
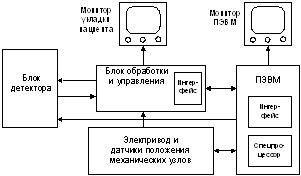
Важнейшими частями детекторной системы являются собственно детектор, куда входят сцинтиллирующий кристалл, световоды, ФЭУ, а также различные аналоговые узлы, из которых наиболее ответственными можно считать резисторные координатные матрицы и узлы ФЭУ. При их проектировании применяют вероятностный подход и методы оптимизации по различным критериям. Эти методы достаточно сложны. Значительное место в этой книге занимает анализ влияния различных физических факторов: взаимодействия g-квантов с кристаллом сцинтиллятора, оптические явления в кристалле и световодах и др. Обсуждение эти вопросов требует специальной подготовки. Поэтому здесь в основном рассматривается преобразование различных сигналов на уровне структурных и электрических схем, а также фрагменты конструкций. Кроме основных узлов, показанных в структурной схеме рис.129, будут рассмотрены также некоторые устройства, обусловленные спецификой сцинтилляционных детекторов.
Электрическое преобразование сигналов начинается с фотоэлектронных умножителей (ФЭУ). Их большое количество предъявляет повышенные требования к их идентичности и стабильности параметров. Но даже после их тщательного отбора в процессе работы параметры и характеристики ФЭУ могут меняться, поэтому необходима периодическая коррекция их режима, которая производится автоматически.
Важнейшим параметром ФЭУ является его коэффициент усиления. Он представляет собой отношение токов анода и фотокатода и определяется формулой
![]() ,
,
где m – количество динодов,
si – коэффициент вторичной эмиссии i-го динода,
gi – коэффициент собирания.
Считая si одинаковыми и gi = 1, получим M = sm. Обычно в детекторах гамма-камер применяют ФЭУ с числом динодов, равным 8. При s = 3 – 4 коэффициент усиления ФЭУ будет составлять около 50000. Коэффициент усиления можно регулировать, изменяя напряжение на катоде ФЭУ или между отдельными динодами. При этом изменяется коэффициент вторичной эмиссии динодов. Вначале, с ростом напряжения между соседними динодами, он увеличивается, а затем достигает максимума и начинает уменьшаться. Однако это происходит при очень больших напряжениях, которые не используются на практике. Такой способ управления режимом ФЭУ применен в схеме, приведенной на рис.1. На этой схеме показан также предварительный усилитель выходных сигналов ФЭУ.
Регулирование коэффициента усиления ФЭУ осуществляется путем изменения напряжения между динодами Д5 – Д7. Для этого от ЦАП на управляющий транзистор VT5 подается напряжение, которое устанавливает ток транзисторов VT1, VT2, VT5 (имеются в виду токи коллекторов, которые практически равны между собой). Транзистор VT5 включен по схеме ОБ, и поэтому его ток пропорционален управляющему напряжению ЦАП: I5 =Uцап/R6. Так как потенциал динода Д5 может быть достаточно большим (по абсолютной величине), применяется последовательное включение относительно низковольтных транзисторов VT1 и VT2.
Рисунок 1. Узел ФЭУ детекторной системы
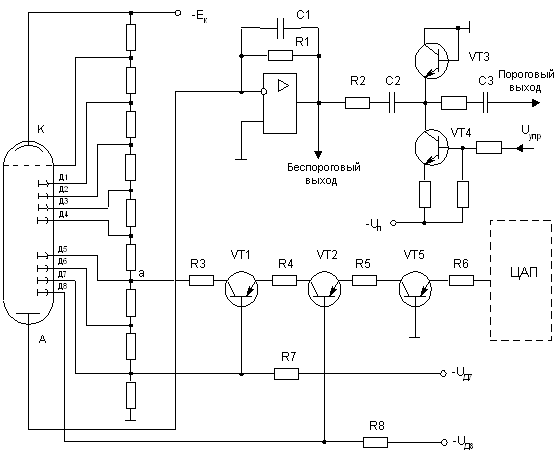 |
Сопротивления резисторов делителя ФЭУ обычно берутся достаточно высокоомными (0,5 – 1 Мом). Однако ток делителя должен быть сравнимым (или больше) с током анода. Сопротивления резисторов R7 и R8 сравнительно невелики (около 10 кОм), поэтому потенциалы динодов Д7 и Д8 практически равны питающим напряжениям UД7 и UД8 .
Выясним, как зависит от управляющего тока I5 потенциал точки а, т.е. динода Д12 Для этого воспользуемся эквивалентной схемой, изображенной на рис.2. Здесь RД1 и RД2 – соответственно суммарные сопротивления делителя выше и ниже точки а. Токами динодов пренебрегаем.
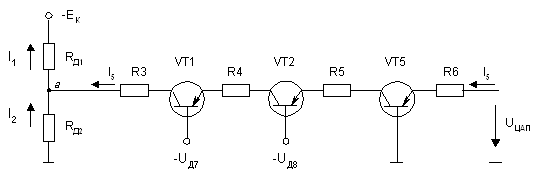 |
Рисунок 2. Эквивалентная схема для расчета потенциала точки а.
Из уравнений I1 - I2 = I5 RД1I1 + RД2I2 = Ек и ![]() находим
находим
 и Ua
и Ua .
.
|
Для оценки диапазона регулирования Ua положим ЕК = 1000 В, RД1 = 4 МОм, RД2 = 2 МОм. Ua будет равно нулю при управляющем токе I5 = 170 мкА. В среднем напряжения между динодами устанавливают около 100 В. Следовательно, потенциалы динодов Д7 и Д8 будут равными соответственно –200 и –100 В. Регулируя потенциал точки а от – 300 до – 210 В, изменяют коэффициент усиления ФЭУ в 1,5 – 2 раза. Если же его повысить до – 200 В, то напряжение между динодами Д6 и Д7 станет равным нулю, и ФЭУ закроется (небольшой ток все же будет протекать). Средний по системе коэффициент усиления ФЭУ регулируют, изменяя напряжение источника Ек , общего для всех ФЭУ.
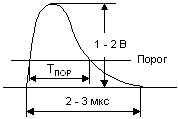
Сигнал ФЭУ усиливается предварительным усилителем на быстродействующем операционном усилителе и транзисторах VT3 и VT4. Выходное напряжение ОУ равно R1×iа. Типичная форма импульса этого напряжения показана на рис.3. Усилитель имеет два выхода – беспороговый и пороговый. Беспороговый выход используют для формирования результирующего энергетического сигнала Z , а пороговый – для получения координатных сигналов X и Y. Практика показала, что при очень слабых сигналах, а это обычно сигналы ФЭУ, расположенных далеко от вспышки, их вклады в общий координатный сигнал приобретают характер флуктуаций и только ухудшают пространственное разрешение. Кроме того, применение порога позволяет уменьшить длительность импульсов (см. рис.3) и вероятность их наложения. Конденсатор С1 служит для сглаживания импульсных помех, а С2, С3 – для отделения импульсного сигнала от постоянной составляющей.
Порог задают с помощью транзисторов VT3 и VT4, причем VT3 включен как диод, а VT4 играет роль управляемого источника тока I0. Ток диода VT3 равен разности IОУ и I0. До тех пор, пока выходной ток ОУ меньше I0 , диод VT4 открыт, и напряжение на пороговом выходе отсутствует. Когда IОУ становится равным I0, диод начинает закрываться, и на пороговом выходе появляется импульс. Величина порога определяется из соотношений IОУ = I0 и IОУ = (UОУ – Uд)/R2. Полагая UОУ = Uпор , находим Uпор = RI0 + Uд .
Все элементы схемы рис.1 размещают на маленьких круглых платах (обычно их две), которые располагаются на цоколе ФЭУ. Этим достигается уменьшение числа соединительных проводников и снижение помех.
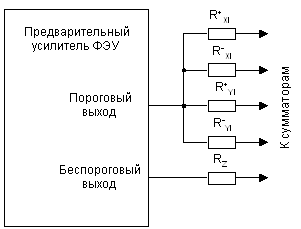
Импульсы напряжения с выходов предварительного усилителя через резисторные матрицы поступают на сумматоры энергетических и координатных сигналов. Причем, к беспороговому выходу подключают по одному резистору с одинаковыми сопротивлениями, а к пороговому – четыре, с разными (весовыми) сопротивлениями (рис.4). Еще раз обратимся к рис.1. Нетрудно догадаться, что сопротивления резисторов ![]() убывают от левого края матрицы ФЭУ к правому, а сопротивления резисторов
убывают от левого края матрицы ФЭУ к правому, а сопротивления резисторов![]() , наоборот, возрастают. Причем, сопротивления
, наоборот, возрастают. Причем, сопротивления ![]() и
и ![]() у ФЭУ, расположенных симметрично относительно оси Y, будут одинаковыми. Аналогично обстоит дело и с резисторами
у ФЭУ, расположенных симметрично относительно оси Y, будут одинаковыми. Аналогично обстоит дело и с резисторами ![]() и
и ![]() . Расчет и проектирование координатных резисторных матриц является сложной и ответственной задачей, так как от ее решения в большой степени зависит качество изображения. Заметим еще, что использование амплитудно-селектированных сигналов для определения координат обусловливает другой способ энергетической коррекции кооринатных сигналов.
. Расчет и проектирование координатных резисторных матриц является сложной и ответственной задачей, так как от ее решения в большой степени зависит качество изображения. Заметим еще, что использование амплитудно-селектированных сигналов для определения координат обусловливает другой способ энергетической коррекции кооринатных сигналов.
|
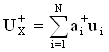
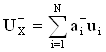
В этом случае будет логичным делить координатные сигналы X = X+ – X–и Y = Y+– Y–на суммы их составляющих:
![]() и
и ![]() (1)
(1)
При этом, кроме компенсации энергозависимости координатных сигналов, будут компенсироваться и погрешности за счет разброса резисторов координатной матрицы.
Представим координатные сигналы в виде сумм
 ;
;  ;
;  ;
;  , (2)
, (2)
где N – число ФЭУ, ui - выходной (пороговый) сигнал i-го ФЭУ. Этот сигнал можно записать как ui = giE, где Е – энергия g-кванта , вызвавшего сцинтилляцию. Коэффициент gi в основном зависит от расстояния центра ФЭУ до места вспышки, а также от индивидуальных параметров ФЭУ. В принципе, его величина для определенных точек (тестовых, или реперных) может быть рассчитана. Подставляя в формулы (1) суммы (2), получим
 ;
;  . (3)
. (3)
Как видно из формул (3), энергетическая зависимость координатных сигналов исключена. Теперь они в основном зависят от геометрических констант и электрических параметров (сопротивлений матриц и масштабных коэффициентов делителей). Кроме того, как уже отмечалось выше, погрешности в их вычисление вносит дискретность фотоприемников.
Если известны весовые коэффициенты ai , bi , то сопротивления координатной матрицы определяются по формулам
![]() ;
; ![]() ;
; ![]() ;
; ![]() , (4)
, (4)
здесь R0 – сопротивление резистора в цепи обратной связи сумматора.
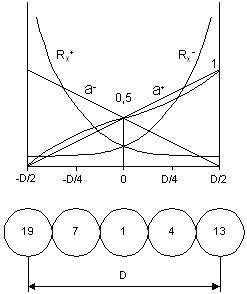
Наиболее простой способ определения весовых коэффициентов состоит в линейной аппроксимации их зависимости от координат. Рассмотрим, как это делается на примере группы ФЭУ, расположенных на оси X матрицы, состоящей из 19 ФЭУ (см. рис.3). Эта группа изображена на рис 5 Коэффициент а+ изменяется слева направо от нуля до единицы, а коэффициент а– наоборот – от единицы до нуля. Это значит, что левый крайний ФЭУ (3) не вносит никакого вклада в координатный сигнал Х+, а правый крайний (4) – в Х–. Весовой коэффициент ФЭУ, расположенного в центре (1), равен 0,12 Поэтому его вклады в сигналы Х+ и Х– будут одинаковыми и при их вычитании они компенсируются.
|
Сопротивления резисторов ![]() и
и ![]() определяются по формулам (3). На рис. 5 их графики имеют вид гипербол, зеркально отраженных относительно оси симметрии. При этом сопротивления
определяются по формулам (3). На рис. 5 их графики имеют вид гипербол, зеркально отраженных относительно оси симметрии. При этом сопротивления ![]() для ФЭУ 13 и
для ФЭУ 13 и ![]() для ФЭУ 19 будут равны R0 , а для центрального ФЭУ все четыре весовых резистора будут иметь одинаковые сопротивления 2R0. Сопротивления
для ФЭУ 19 будут равны R0 , а для центрального ФЭУ все четыре весовых резистора будут иметь одинаковые сопротивления 2R0. Сопротивления ![]() и
и ![]() соответственно для ФЭУ 19 и 13 равны бесконечности, т.е. просто отсутствуют. Весовые сопротивления
соответственно для ФЭУ 19 и 13 равны бесконечности, т.е. просто отсутствуют. Весовые сопротивления ![]() для ФЭУ 4 и 7 будут равны соответственно 4R0 и 4/3R0 , или 1,333R0. Из этого простого примера видно, что для координатной матрицы нужно брать высокоточные спротивления (не менее 0,1%).
для ФЭУ 4 и 7 будут равны соответственно 4R0 и 4/3R0 , или 1,333R0. Из этого простого примера видно, что для координатной матрицы нужно брать высокоточные спротивления (не менее 0,1%).
Для оптимизации сопротивлений резисторной матрицы можно воспользоваться критериями минимума нелинейности пространственной зависимости координатных сигналов или минимума неоднородности изображения. Сущность первого метода состоит в минимизации суммы квадратов отклонений координатных сигналов от истинных координат сцинтилляций, вычисленных в нескольких тестовых точках, равномерно покрывающих площадь детектора. График коэффициентов а+, найденных этим методом, показан на рис.5 тонкой линией.
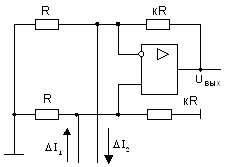
Резисторные матрицы подключаются к входам сумматоров, которые выполняются на быстродействующих операционных усилителях. Особенность работы сумматоров состоит в большой частоте и относительно малой скважности импульсов. Это приводит к появлению существенной постоянной составляющей на разделительных и паразитных емкостях, которая вызывает смещение нуля входного операционного усилителя сумматора.
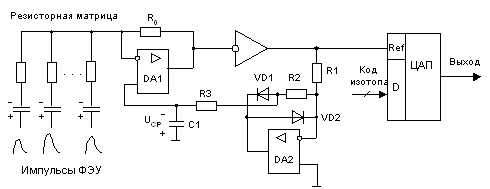 |
Рисунок 6. Сумматор координатных сигналов
Кроме того, необходимо учитывать, что для исследований могут применяться РН с разными энергиями g-квантов. При этом выходной сигнал сумматора нужно изменять соответствующим образом, т.е. нормировать. Схема сумматора, учитывающая эти особенности, приведена на рис.6.
На резисторную матрицу через разделительные конденсаторы поступают положительные импульсы от предварительных усилителей ФЭУ. Эти импульсы заряжают конденсаторы, и на них появляется отрицательное (по отношению к общей точке) смещение. Оно будет тем больше, чем выше частота импульсов. В результате может сильно вырасти (вплоть до насыщения ОУ) постоянная составляющая выходного напряжения сумматора. Чтобы скомпенсировать смещение, сумматор охватывают нелинейной отрицательной ОС. Для этого его выходной сигнал еще раз инвертируют и подают на вход прецизионного выпрямителя (DA2, VD1, VD2). Он пропускает только положительные импульсы и при этом их инвертирует. Цепочка R3, C1 выделяет из них постоянную составляющую UCР, которая и компенсирует смещение, вызываемое средним уровнем входных импульсов (базовый уровень). Для нормирования выходного сигнала по энергии применяемого изотопа применен перемножающий ЦАП, играющий роль аттенюатора. На вход опорного напряжения (Ref) подают аналоговый сигнал, а на цифровые входы – код изотопа. Он зависит от энергии изотопа: чем больше энергия, тем меньше код.
Выходные импульсы сумматоров еще нельзя непосредственно использовать для дальнейшей обработки, так как их информационные параметры недостаточно определенны. Более объективную информацию дает интегрирование этих импульсов: площадь импульса пропорциональна энергии. Кроме того, при этом исходные импульсы сложной формы можно преобразовать в импульсы стандартной прямоугольной формы. Принцип интегрирования координатных и энергетических импульсов поясняет рис.7.
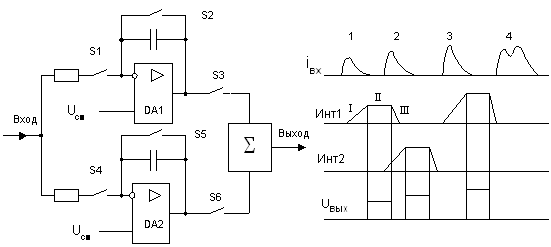 |
Рисунок 7. Интегратор координатных и энергетических сигналов
Поскольку сцинтилляции имеют случайный характер (пуассоновское распределение), то интервалы между импульсами имеют большой разброс. Они могут быть настолько малыми, что интегратор может оказаться не готовым к интегрированию очередного импульса. В схеме рис.7 эта проблема решается применением двух интеграторов, включенных параллельно. Если к приходу очередного импульса один из интеграторов оказывается занятым, то функция интегрирования передается другому. Выходные сигналы интеграторов объединяются сумматором.
Работа каждого интегратора состоит из трех стадий. Допустим, что работает первый интегратор. На стадии I замкнут ключ S1, а S2 и S3 разомкнуты – производится интегрирование входного сигнала. На стадии II замкнут ключ S3, а S1 и S2 разомкнуты – стадия хранения; при этом на выходе сумматора возникает прямоугольный импульс. На стадии III ключи S1 и S3 разомкнуты, а S2 замыкается – происходит сброс интегратора. К моменту появления импульса 2 первый интегратор еще находится в стадии хранения, поэтому функция интегрирования передается второму интегратору. Работой устройства управляет специальная схема, формирующая импульсные последовательности с учетом амплитудно-временных параметров входных сигналов.
Еще одной проблемой, которую приходится решать в этом узле, представляет наложение импульсов (на рис.7 это импульс 4). Такие импульсы сливаются в один, но вызваны они могут быть вспышками с разными координатами. Поэтому наложенный импульс несет не информацию, а дезинформацию, и его лучше вовсе исключить из общей последовательности. Схема управления делает это на основе амплитудно-временных признаков.
Выходные сигналы координатных интеграторов поступают в корректор энергетической зависимости координатных сигналов. Это устройство является одним из самых оригинальных аналоговых устройств гамма-томографа ГКС-301Т и его преемника – томографа ОФЭКТ. Поэтому оно заслуживает более подробного рассмотрения. Как уже отмечалось, вместо энергетического сигнала Z в нем в качестве сигнала-делителя используются суммы составляющих координатных сигналов X = X+ – X– и Y = Y+– Y–
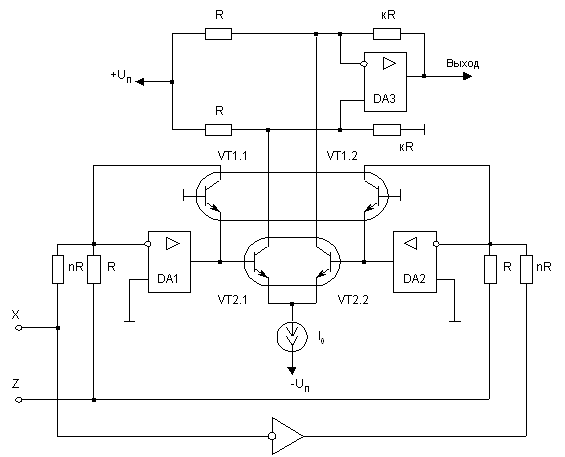
Рассмотрим вначале общую задачу аналогового деления двух сигналов. Она может быть решена различными способами. Один из них показан на рис.8. Делитель состоит из двух логарифмических преобразователей (логарифматоров) на операционных усилителях DA1, DA2 и транзисторах VT1.1, VT1.2. Эти транзисторы так же, как и транзисторы VT2.1 и VT2.2, представляют собой элементы микросхемы (транзисторной сборки). Поэтому они практически идентичны, что обеспечивает симметрию схемы и малый дрейф.
|
Действие логарифматоров основано на нелинейной зависимости между током эмиттера и напряжением эмиттер-база. Эта зависимость может быть представлена в виде двух эквивалентных формул
![]() или
или  , (5)
, (5)
где IS – обратный ток (насыщения) эмиттерного перехода; m = 1/mjт ; jт = кТ/e – тепловой потенциал; m – коэффициент (m = 1 – 2 )
Так как в дальнейшем в основном будем оперировать коллекторными токами, и учитывая, что они практически равны эмиттерным токам, в формулах (5) заменим IЭ на IК. Кроме того, учитывая, что единица в скобках этих формул обычно намного меньше первых слагаемых, запишем их в виде
![]() и
и  (6)
(6)
Далее, говоря о токе транзистора, будем подразумевать его коллекторный ток.
Выходное напряжение U1 микросхемы DA1 равно UЭ транзистора VT1.1. Ток этого транзистора равен сумме входных токов, вызываемых сигналами X = X+ – X–и Z = X+ + X–:
![]() , где n – коэффициент (n > 1).
, где n – коэффициент (n > 1).
Используя вторую формулу из (127), получим
![]() .
.
На второй логарифматор сигнал Х подается через инвертор. Поэтому выходное напряжение микросхемы DA2 будет определяться формулой
![]() .
.
Воздействие сигналов U1 и U2 на дифференциальный каскад, собранный на транзисторах VT2.1 и VT2.2, можно представить как результат отдельного действия синфазной и разностной составляющих. Синфазная составляющая не вызывает изменения токов транзисторов каскада. Разностный сигнал будет равен
 (7)
(7)
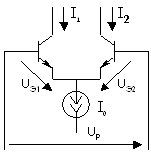
Рассмотрим теперь, как это напряжение преобразуется дифференциальным каскадом. Для этого воспользуемся вспомогательной схемой на рис.9. Запишем для этой схемы несколько очевидных соотношений
I1+ I2 = I0 ; UP = UЭ1 – UЭ2; UЭ1 = U0 +Du1; U0 –Du2, где U0 – напряжение UЭ , соответствующее состоянию баланса I1 = I2 = I0/2. Отсюда следует, что UP = Du1 + Du2 .
Запишем ток I1 согласно первой формуле (7)
![]()
![]() . Аналогично
. Аналогично ![]() . Учитывая, что
. Учитывая, что ![]() ,запишем
,запишем ![]() ,а с учетом I1 + I2 = I0 получаем
,а с учетом I1 + I2 = I0 получаем ![]() . Используя формулу (8), запишем
. Используя формулу (8), запишем
 .
.
Обозначим ![]() . Тогда
. Тогда ![]() ;
; ![]() .
.
Сигнал на выходе делителя (DA3) определяется приращением токов I1 и I2 :
![]() ;
; ![]() .
.
Выходной сигнал определяется из эквивалентной схемы рис. 10:
![]() , где
, где ![]() =
= ![]() =
=![]() . После подстановки сюда величины
. После подстановки сюда величины ![]() получаем
получаем ![]() , или
, или ![]() .
.
Производя подстановку выражения для а, находим
![]() ,
,
и окончательно ![]() (9)
(9)
Энергетический корректор координатных сигналов, выполненный согласно рис.8, предполагает формирование сигналов X, Y и Z по структурной схеме рис.10. При этом для получения координатных сигналов требуются вычитатели суммарных координатных сигналов полуплоскостей. Если же X и Z представить в форме X = X+ –X– и Z = X+ +X–, то схемы корректоров существенно упрощаются. Тогда сигналы Z + X/n и Z – X/n примут вид
![]() и
и ![]() (10)
(10)
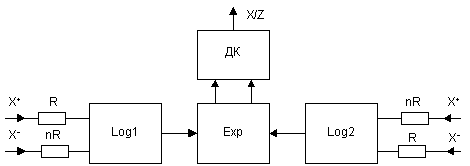
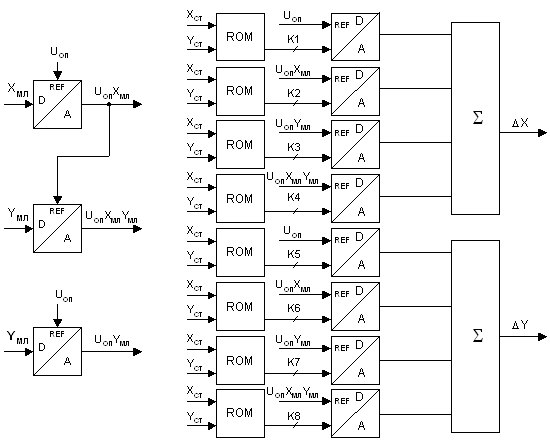
Из формул (10) видно, что слагаемые в правых частях представляют собой униполярные сигналы и, таким образом, отпадает необходимость в инверторе и вычитателях. Тем самым достигается лучшая симметрия схемы, уменьшаются задержки. Структурная схема корректора с таким представлением координатных сигналов приведена на рис.11. Его выходной сигнал определяется формулой
![]() (11)
(11)
где X = X+ – X– , Z = X++X– .
Оптимальная величина n лежит в диапазоне 2 …3, а к – в диапазоне 1 …2.
Для выполнения схемы корректора применяют быстродействующие операционные усилители и транзисторы, что позволяет производить деление импульсов с частотой до 500 кГц. Как следует из предыдущего описания, на входы корректора поступают прямоугольные импульсы от интеграторов. Однако на его выходе все же возникают выбросы. Для их устранения используют устройства выборки-хранения.
|
Похожие работы
... встречающейся на практике максимальной скорости счета. Технология изготовления сцинтилляционных кристаллов весьма сложна, и поэтому стоят они дорого. Производство сцинтилляторов и детекторов для РН диагностики, и в частности, для гамма-камер – чрезвычайно наукоемкая отрасль. Выпуском таких детекторов уже давно занимается научно-производственное объединение НИИ монокристаллов (г. Харьков). Его ...
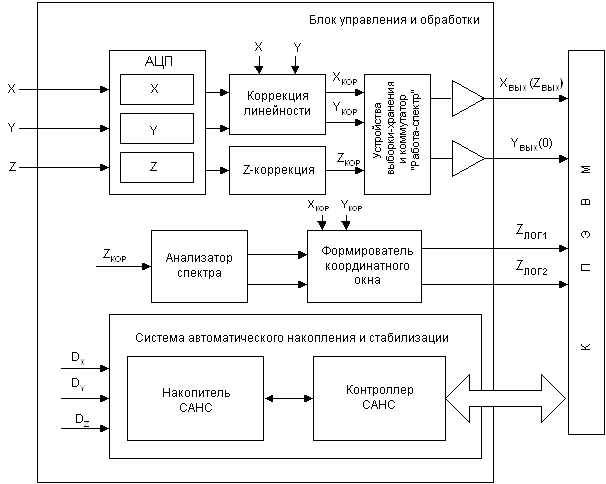
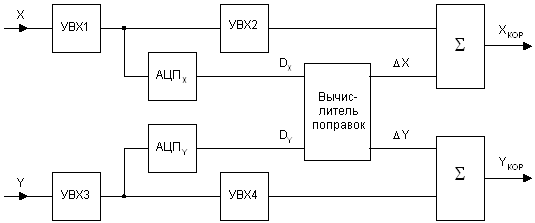
... аналоговой коррекции энергетической зависимости X и Y преобразования продолжаются только в цифровой форме. Обобщенная структурная схема цифрового канала измерительной информации изображена на рис.8. Рисунок 8. Канал аппаратной цифровой обработки. АЦП Х, Y, Z размещаются в модуле детектора в непосредственной близости от аналоговых источников. Это сводит к минимуму примесь всевозможных помех. ...
0 комментариев