Навигация
Разработка принципиальной схема САУЭП и составляющих ее основных блоков
29058
знаков
3
таблицы
24
изображения
3.2 Разработка принципиальной схема САУЭП и составляющих ее основных блоков
Весь рабочий цикл барабана закалочной машины делится на три этапа:
а) разгон до установившейся скорости и движение на этой скорости;
б) торможение и точная остановка барабана в заданном положении;
в) пауза.
В исходном состоянии системы подано напряжение на обмотку возбуждения двигателя, источники питания включены, главные цепи замкнуты.
Сельсин находится в нулевом положении, выходное напряжение задатчика интенсивности 13И равно нулю.
Соответственно регуляторы тока, ЭДС и положения имеют нулевые сигналы на выходе. Привод неподвижен.
При команде на запуск барабана включается реле КЗ (ЯР1) и подает напряжение на вход 13И, Появляется ток в цепи якоря двигателя который через датчик тока сравнивается с изменяющимся выходом регулятора ЭДС и обеспечивает разгон привода. Разгон продолжается до установившейся скорости, пока сигнал обратной связи по ЭДС на входе РЭ не станет равным сигналу с 13И. Выход РЭ
уменьшается до величины, которая обеспечит ток двигателя, равный статической нагрузке.
На этом завершается разгон, и привод движется на установившейся скорости. После того, как узел вычисления начала торможения УВНТ подаст сигнал на торможение, снимается напряжение задания, и замыкается контур положения (обесточивается реле КЗ (ЯР1)). Выход фазовьшрямительного устройства ФВУ-1 подключается к 13И. Начинается торможение барабана с заданной интенсивностью и установка в исходном положении. При точной установке барабана в исходном положении, выходное напряжение ФВУ-1 должно быть равно 0±0,Зв. Тормоз накладывается после того, как барабан находится в зоне исходного положения не менее 0.5 сек. Эта выдержка предотвращает преждевременное затормаживание до полного окончания переходных процессов. После этого происходит закорачивание РТ и РЭ
Узел вычисления начала торможения УВНТ
УВНТ предназначен для формирования сигнала в начале торможения барабана. УВНТ состоит из компараторов DA1 и DA3 ячейки ЯК1 и ячейки логики ЯЛ. Индикация осуществляется светодиодом HL3 на панели измерений, Компаратор DA1 управляется выходным напряжением ФВУ-2^ а компаратор ВАЗ выходным напряжением ФВУ1.
Величина опорного напряжения Uon выбирается из расчета нормального торможения механизма, с дотягиванием до исходного положения, и регулируется резистором R1 ячейки ЯК1.
Превышение сигналом Uфву2 опорного напряжения Uon вызывает срабатывание компаратора DA1. При этом на его выходе появится сигнал Udai=-0,5 в ("0"). Если ифСУ2 < Uon то выходное напряжение Udai= + 3,3 в ("1"). Состояние компаратора DA3 меняется согласно полярности сигнала Uфву1.
Выходной сигнал "0" с ВАЗ является сигналом запрета на срабатывание схемы УВНТ (начало торможения) в зоне 0-180° поворота С Д. Согласно диаграмме на рис.8 в момент времени, когда U<j,By2 = Uon и сигнал Uda3 = "1", на выходе схемы DB7-1 появляется сигнал Udd7-i = "!"• С появлением этого сигнала, транзистор VT6 открывается, замыкая цепь реле К5, расположенного в ЯР1, и светодиода HL3. Н.о. контакт реле К5 замыкает цепь питания реле К2 (ЗП). Своими н.о контактами реле К2 самоблокируется, а н.з. контактами размыкает цепь питания реле КМ 10. Сигнализация Замыкания контура положения осуществляется светодиодом
 |
HL3 на панели измерения.
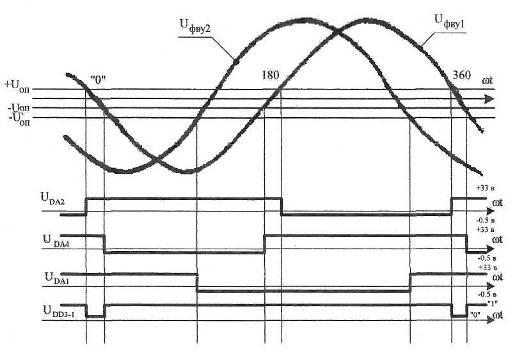
Рис 10. Индикатор исходного положения ИИП. Диаграмма напряжений.
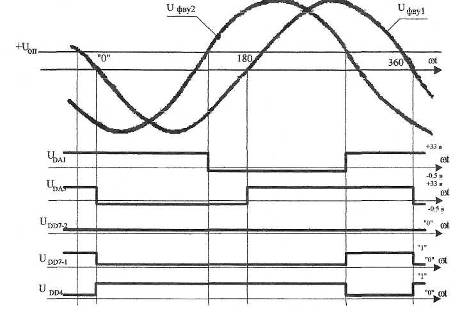
Рис. 11. Узел вычисления начала торможения УВНТ.
Индикатор исходного положения ИИП
ИИП предназначен для контроля исходного положения барабана закалочной машины. Схема ИИП изображена в приложении Рис 6. ИИП состоит из компараторов DA2, DA4, ячейки ЯК1 и компаратора DA1 ячейки. ЯК2 и ячейки логики ЯЛ* Индикация исходного положения осуществляется светодиодом Д1 на панели измерений.
Компараторы DA4 и DA2 управляются выходным напряжением ФВУ1, компаратор DA1 - выходным напряжением ФВУ2. Характеристики ФВУ и диаграммы работы логики ИИП изображены на рис. 11.
Величины опорных напряжений + Uon и - Uon выбираются в зависимости от ширины зоны исходного положения и регулируются резисторами R2 и R4. Превышение сигналом U<j>Byi опорного напряжения + Uon вызывает срабатывание компаратора DA2. При этом на его выходе появляется сигнал Uda2 = -0-5 в ("0"), Если ифВУ1 < +Uon, то выходное напряжение компаратора UDa2= +3,Зв ("1"). Превышение сигналом ифву1 опорного напряжения - Uon вызывает срабатывание компаратора DA4. При этом на его выходе появляется сигнал Uda4 = +3,3 в (1). Если ифвУ1< - Uon, то выходное напряжение Udai= **0?5 в ("0").
Состояние компаратора DA1 изменяется соответственно изменению сигнала l^By2. Согласно диаграмме на рисЛ, в зоне исходного положения выходной сигнал ИИП Ubd3-i = "0"- Транзистор VT1 открывается, замыкая цепь светодиода HL1, Тем самым осуществляется сигнализация исходного положения барабана. В зоне 1805 ("ложный нуль") выходной сигнал Udd3-i= «1>>, так как на вход схемы DD3-1 подан сигнал запрета UDAi= «0» от компаратора DA1. Диаграмма показывает изменение сигнала UDd3-i за один оборот сельсина.
Выходной сигнал ИИП через логическую схему DD3-3 поступает на вход транзисторов VT2, VT7. Эти транзисторы открываются и замыкают цепь питания реле К1 (ЗП). Роле К1 срабатывает и своими н.з. контактами размыкает цепь питания реле КТ4. После этого накладывается механический тормоз.
3.3 Разработка технологических и защитных блокировок
Разрешается работа привода поворота барабана закалочной машины только в том случае, если:
1. Выталкиватель находится в исходном положении (включено реле 25РВИ);
2. Доталкивателъ находится в исходном положении (включено реле 22РДИ);
3. Направляющие устройства в исходном положении (включены реле 24-1 РНИ и 24-2 РНИ);
4. Не осуществляется задача и выдача рельсов (включено реле 5ФРР и отключено реле 4ФРР);
5. Нет рельса в 11-й каретке барабана (отключено реле НРБ схемы сигнализации).
Если выполняются все эти условия, то собран узел «А», который дает разрешение на поворот барабана.
Для контроля прохождения рельсом определенных технологических зон использованы фотореле в количестве 14-ти штук и три емкостных датчика.
Защита электрооборудования
Схема предусматривает следующие защиты:
1. Максимально-токовая защита двигателя (реле FA1).
2. Реле контроля возбуждения FA2.
3. Превышение максимальной ЭДС двигателя (реле KV1)
4. Сеточная защита преобразователя по переменному току.
5. Сеточная защита преобразователя по постоянному току.
Уставки защит приведены в таблице 4 и протоколах наладки барабана.
Таблица 4
| Вид защиты | Монтажный символ элемента | Уставка | |
| 1. | Максимальная токовая защита | FA1 | 350А |
| 2. | Контроль тока возбуждения | FA2 | Iвт=4,3А; Iотп=3,2А |
| 3. | Превышение максимальной ЭДС | KV1 | 520 В |
| 4. | Сеточная защита по переменному току | БТЗ (АТР) | 600 В |
| 5. | Сеточная защита по постоянному току | БТЗ (АТР) | 390 В |
Раздел 4. КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ САУ ЭП
4.1 Математическая модель САУЭП
Моделирование работы системы произведено на основании структурной схемы с помощью математического пакета Matlab Simulink. Модель изображена на рисунке.
Рисунок 13. Модель системы, построенная с помощью математического пакета Matlab Simulink
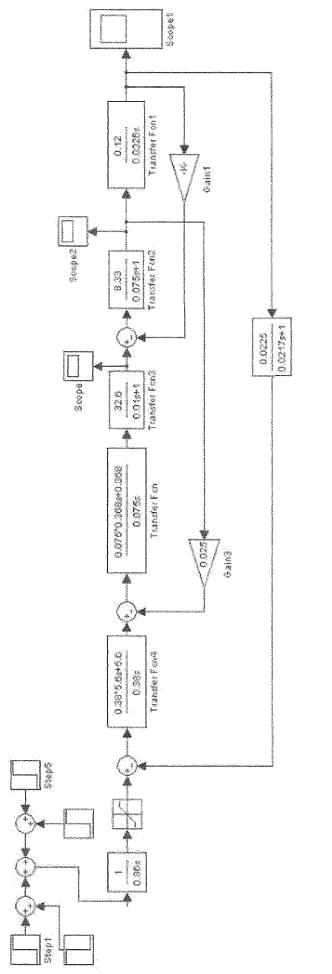
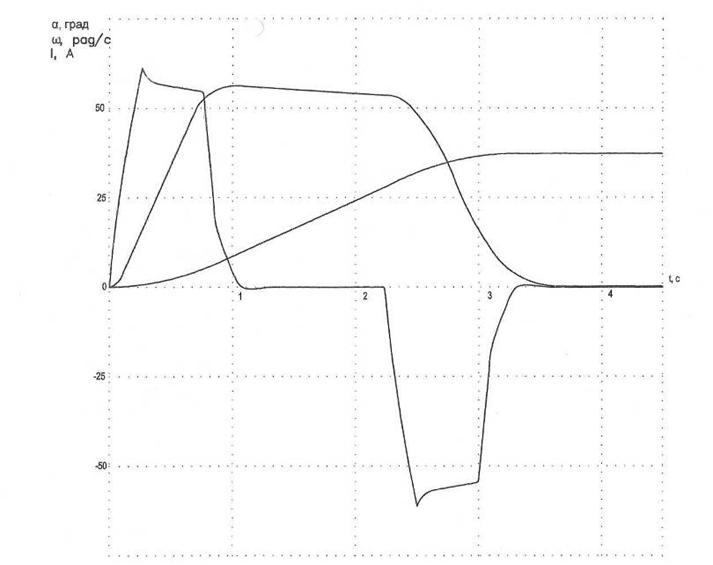
Рисунок 14. Графики переходных процессов скорости, угла поворота барабана и тока
ЗАКЛЮЧЕНИЕ
В настоящее время система автоматизации выполнена на релейно-контакторной базе. Данный вид схем не обеспечивает безаварийной работы, а главное быстрое устранение неполадок в системе, ввиду низкой степени информативности и самодиагностики. В связи с ее громоздкостью и трудностью определения неполадок необходимо осуществить ее перевод на базу программируемого контроллера. Модернизация БЗМ имеет перед собой две основных задачи:
- замена привода вращения БЗМ;
- автоматизация участка ЗМ.
Существует два варианта реализации поставленной задачи. Эти варианты различаются по глубине внедрения в систему.
Первый вариант предусматривает замену только узла автоматики ЗМ и релейной панели управления БЗМ. В этом случае в панели исполнительных механизмов будут выдаваться управляющие сигналы при работе в автоматическом режиме. Ориентировочно для реализации работы системы будет использовано около 130 входных дискретных сигналов и 50 выходных.
Второй вариант предусматривает упрощение релейно-контакторных панелей управления механизмами участка за счет передачи их функций контроллеру. Управление механизмами будет вестись через контроллер как в ручном, так и в автоматическом режимах. Будет обеспечен значительно больший объем информации об оборудовании и лучшее ее представление. Возникает необходимость ввода в контроллер всей информации с органов управления механизмами (ключей, кнопок, командоаппаратов). Ориентировочно для реализации системы по этому принципу потребуется около 300 входных дискретных сигналов и 100 выходных. Число сигналов может уменьшиться за счет ввода части информации через панель оператора.
СПИСОК ИСПОЛЬЗУЕМЫХ ЛИТЕРАТУРНЫХ ИСТОЧНИКОВ
1. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: Метод. Указ. / С.А. Дружилов, А.К. Мурышкин: СибГИУ. - Новокузнецк, 2007. - 45 с.
2. Егоров В.Ф., Егоров СВ. Электропривод металлургических машин и агрегатов: Учебное пособие / СибГИУ - Новокузнецк, 2002 — 336 с, 125 ил., 31 табл.
3. Бычков В.П. Электропривод и автоматизация металлургического производства. Учеб. пособие для вузов. Изд. 2-е, перераб. и доп. М., «Высш. школа», 1977
4. Инжиниринг электроприводов и систем автоматизации: учеб. пособие для студ. высш. учеб. заведений / [М.П.Белов, О.И. Зементов, А.Е. Козярук и др.]; под ред. В.А. Новикова, Л.М. Чернигова. - М.: Издательский центр «Академия», 2006. - 368 с.
5. Островлянчик В. Ю. Автоматический электропривод постоянного тока горно-металлургического производства: учеб. пособие [для студентов вузов, обучающихся по спец. «Электропривод и автоматика пром. установок», «Математическое обеспечение и применение ЭВМ в металлургии»]/ В. Ю. Островлянчик. - Новокузнецк: СибГИУ,2004. - 383 с.
0 комментариев