Навигация
Оценка качества САУ в переходном режиме. Показатели качества
7530
знаков
4
таблицы
8
изображений
3. Оценка качества САУ в переходном режиме. Показатели качества.
Показатели качества в переходном режиме:
1 Прямые показатели качества:
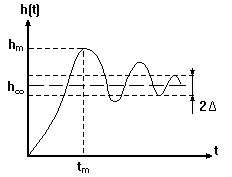
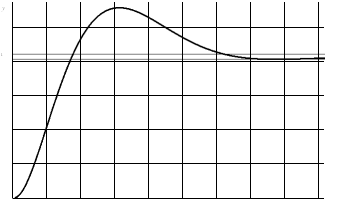
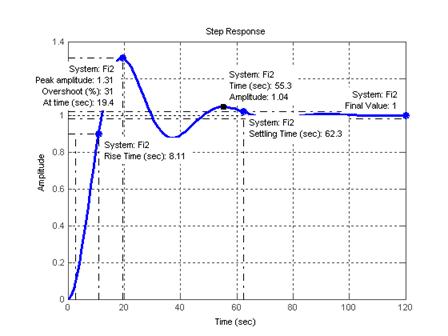
1.1Время регулирования
1.2Перерегулирование
Время регулирования ![]() - минимальное время, по истечение которого (с момента подачи ступенчатого воздействия) отклонение выходной величины от установившегося значения не превышает некоторой заданной величины
- минимальное время, по истечение которого (с момента подачи ступенчатого воздействия) отклонение выходной величины от установившегося значения не превышает некоторой заданной величины
![]() , где
, где ![]() - установившееся значение переходной ха-рактеристики.
- установившееся значение переходной ха-рактеристики.
| Перерегулирование –максимальное отклонение переходной характеристики от установившегося значения
Если
|
 .
.
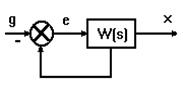
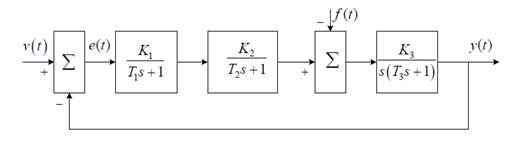
Порядок построения переходной характеристики не зависит от места приложения входного воздействия. Поэтому достаточно рассматривать, как строится переходная характеристика при действии какого-либо одного воздействия, например задающего.
|
|
Пусть  - дробно - рациональная функция. Если полюсы
- дробно - рациональная функция. Если полюсы ![]()
![]() этой функции простые, то
этой функции простые, то

Если полюсы ![]() кратные, то формула усложняется (через предел).
кратные, то формула усложняется (через предел).
Пример.
Пусть ![]() - п.ф. разомкнутой системы, тогда п.ф. замкнутой системы
- п.ф. разомкнутой системы, тогда п.ф. замкнутой системы

![]()
 .
.
2 Косвенные показатели качества:
2.1 Корневые
2.2 Частотные
2.3 Интегральные.
2.1.1 степень устойчивости
Корневые
2.1.2 колебательность
Качество системы можно рассматривать, когда все корни характеристического уравнения левые, т.е. система устойчива.
Степень устойчивости - расстояние от мнимой оси до ближайшего корня
![]() , где
, где ![]() - корни характеристического уравнения
- корни характеристического уравнения
характеризует быстродействие системы. При прочих равных условиях чем больше ![]() , тем быстрее затухает переходной процесс.
, тем быстрее затухает переходной процесс.
Колебательность - мера склонности системы к колебаниям

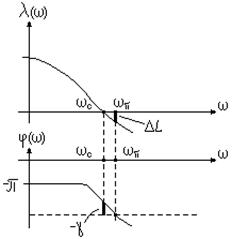
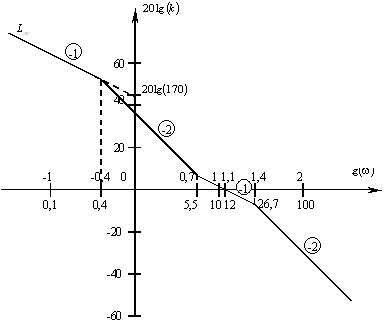
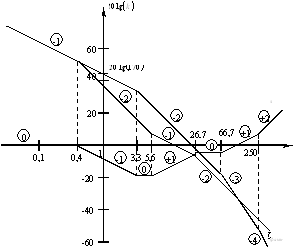
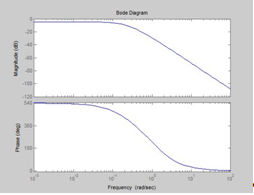
2.2 Частотные показатели качества:
2.2.1 Запас устойчивости по амплитуде
2.2.2 Запас устойчивости по фазе.
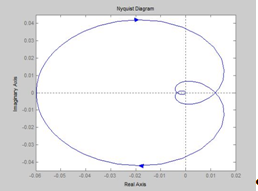
По ЛАЧХ и ФЛЧХ По АФЧХ
![]()
![]() - частота, при которой сдвиг фазы
- частота, при которой сдвиг фазы
![]()
|
|
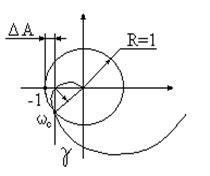
![]() - частота среза
- частота среза
Чем меньше запасы по амплитуде
и фазе, тем медленнее затухает процесс.
|
|
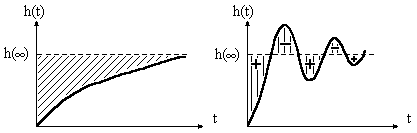
2.3 Интегральные показатели качества.
2.3.1 Интегральная ошибка – определяется при апериодическом и монотонном переходном процессе – ![]()
2.3.2 Квадратичная интегральная ошибка – определяется при колебательном переходном процессе– ![]()
Ошибку системы можно представить в виде суммы ![]() , где
, где
![]() - переходная составляющая ошибки;
- переходная составляющая ошибки;
![]() - установившаяся ошибка.
- установившаяся ошибка.
 - квадратичная интегральная ошибка
- квадратичная интегральная ошибка
Похожие работы
... , , , , , . Проверяем: . . . . Так как , то система неустойчива, а это значит, что необходимо проектировать корректирующие устройства. 2. ДИНАМИЧЕСКИЙ СИНТЕЗ САУ ПО ЗАДАННЫМ ТРЕБОВАНИЯМ К КАЧЕСТВУ ЕЕ РАБОТЫ 2.1 Определение желаемой передаточной функции В соответствии с вариантом задания принимаем желаемую ЛАЧХ типа . Ее передаточная функция будет иметь вид: , ...
... записи в Zam_ck=inv(l+sysl)*sysl можно в диалоговом режиме произвести новую запись zpk(.) - сокращая одинаковые элементы числителя и знаменателя в Zam_ck. 2.Исследование линейной импульсной системы автоматического управления Задание: 1) Найти передаточные функции импульсной САУ: W*(z) разомкнутой системы, Ф*(z) – замкнутой системы, Фе*(z) – системы по ошибке. Параметры Т, Т1, τ1, К0, ...
... переходного процесса должна быть минимальным. Большинство уравнений объектов являются нелинейными, однако в этих случаях знание решений, полученных для линейных систем, часто дает возможность подойти к решению для нелинейной системы. 1 Расчет параметров настройки типовых регуляторов линейной САР 1.1 Анализ объекта регулирования Кривая разгона показывает реакцию объекта ...
... определению: ; Составим диагональные миноры: ; ; Итак, получаем, что ; ; , т.е. условие устойчивости системы не выполняется, а следовательно система по критерию Гурвица неустойчива. 4.2 Исследование устойчивости САУ по критерию Найквиста В соответствии со структурной схемой (рис.3) АЧХ и ФЧХ разомкнутой САУ можно представить в виде произведения АЧХ и суммы ФЧХ элементарных ...
0 комментариев