Навигация
Фазові кутові моноімпульсні системи
16189
знаков
1
таблица
10
изображений
Фазові кутові моноімпульсні системи
1. Фазовий кутовий пеленгатор
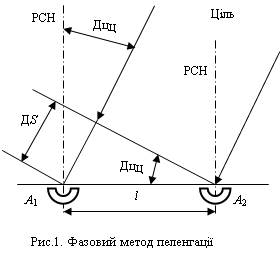
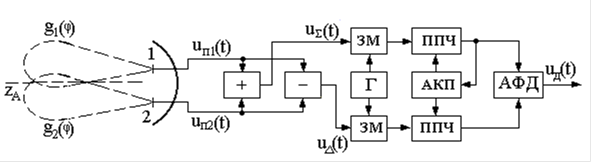
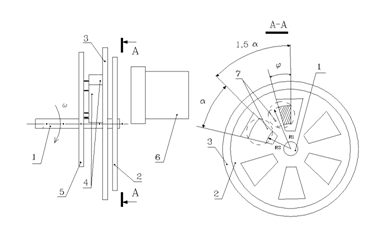
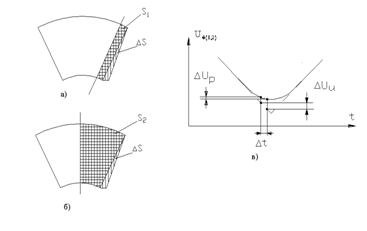
У оглядових моноімпульсних системах із фазовою пеленгацiєю напрямок на ціль визначається порівнянням фаз сигналів, прийнятих двома рознесеними на відстань l антенами А1 і А2 (рис. 1). Оскільки відстань від цілі до антен значно більше базової відстані l між антенами, то прийняті від відповідача сигнали практично однакові за амплітудою, але різняться за фазою на Дш. Різниця фаз Дш визначається різницею відстаней DS від цілі до антен А1 і А2, де розмір DS є, у свою чергу, функцією кутового відхилення цілі DjЦ від РСН
![]() .
.
Отже
![]() , (1)
, (1)
де l – довжина хвилі сигналу відповіді.
Оскільки кути DjЦ зазвичай не перевищують двох-трьох градусів, то ![]() .
.
Звідси
![]()
або в градусах
![]() .
.
На рис. 2 показані графіки цієї залежності для чотирьох випадків, коли відносні значення антенної бази l/l дорівнюють 5, 10, 20 і 40. Крутизна відповідних характеристик, тобто
![]()
дорівнює, відповідно, 31, 62, 124 і 248.
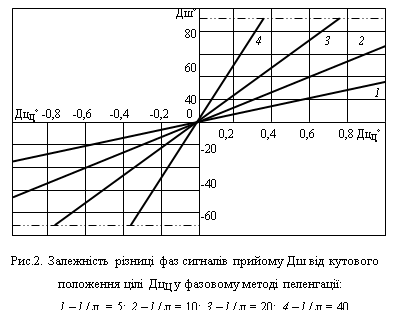
Таким чином, чим більше відносне рознесення антен А1 і А2, тим із більшою точністю можна визначати кутове положення цілі відносно РСН антени.
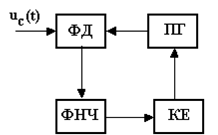
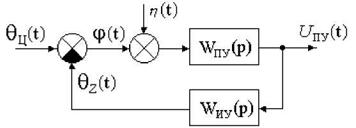
Здобуття інформації, яка міститься у різниці фаз прийнятих сигналів, провадиться за допомогою найпростішого кутового дискримінатора – фазового детектора (ФД). Якщо характеристика ФД описується виразом
![]() ,
,
де U – відносне значення амплітуди сигналу на його виході, а Dy – різниця фаз сигналів, що надходять до ФД, то вираз (1) прийме вигляд
![]() . (2)
. (2)
Звідси
![]() . (3)
. (3)
Відповідні графіки для чотирьох співвідношень l/l наведені на рис. 3.
Однозначне визначення DjЦ у функції амплітуди сигналу U на виході ФД можливе лише в тому випадку, коли різниця фаз сигналів Dy лежить у межах ±90°. Таким чином граничні однозначні значення кутів Dj°Ц ГРАН будуть згідно з рівнянням (1) визначатися виразом
![]() .
.
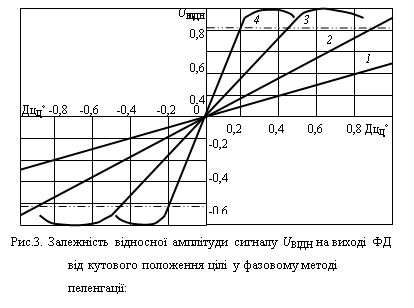
Для зазначених вище співвідношень l/l (5, 10, 20 і 40) граничні значення кутових відхилень Dj°Ц ГРАН, що можуть бути визначені за допомогою фазового пеленгатора і ФД, складуть, відповідно, ±2,68°, ±1,48°, ±0,72° і ±0,36°, але з огляду на значне падіння на ділянках 0,8 < UВІДН < 0,9 і – 0,9 < UВІДН < – 0,8 (рис. 3) крутизни характеристик UВІДН = f(DjЦ) реальні граничні значення DjЦ орієнтовно дорівнюватимуть ±1,64°; ±0,41° і ±0,21°.
Розглянемо деякі питання практичної реалізації фазових пеленгаторів.
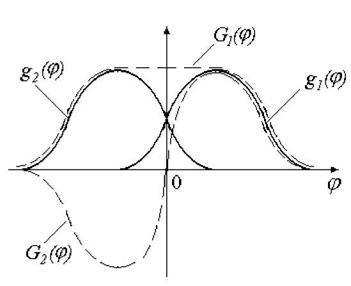
У фазовому пеленгаторі антенна система має сформувати дві ідентичні ДН, рівносигнальні напрямки яких строго паралельні, а фазові центри рознесені на відстань l відносно один одного. Ширина ДН кожної з антен A1 і A2 згідно з рекомендаціями ICAO не повинна перевищувати 3°. Ця вимога обумовлена необхідністю зменшення кількості ПС, що одночасно потрапляють у промінь антени, тобто відповідають одночасно на запити, передані ВРЛ. Крім того, з вузькими ДН антен радіолокаторів поліпшуються енергетичні показники їхніх передавачів.
У фазових пеленгаторах ДН можуть формуватися дзеркальними антенами або антенними ґратками. У випадку застосування дзеркальних антен виконати таку антену з одним відбивачем і двома рознесеними на достатньо велику відстань опромінювачами неможливо. Сформовані такою антеною ДН виявляються неідентичними, а РСН – непаралельними. Отже, антенна система такого пеленгатора повинна складатися з двох самостійних дзеркальних антен, розміщених на обертовій балці і рознесених, як мінімум, на відстань поземного розкриву (діаметра) їхніх дзеркал.
Поземний розкрив дзеркала кожної з антен може бути визначений із таких міркувань.
Ширина ДН параболічних антен на рівні половинної потужності (Dj°А) в градусах визначається за формулою
![]() ,
,
де R – радіус розкриву антени; l – довжина хвилі; f – фокусна відстань параболічного дзеркала; a=0,5 для площини Е, яка збігається з площиною поляризації випромінюваної або прийнятої хвилі, і а=0,2 для площини Н, перпендикулярної до площини Е.
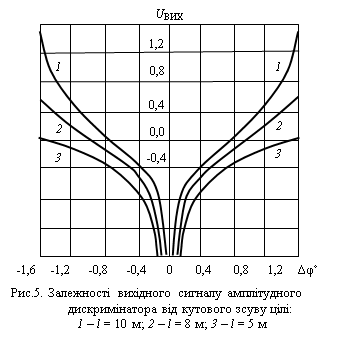
Для ВРЛ, які задовольняють вимоги ICAO, сигнали відповіді передаються на частоті 1090 МГц із прямовисною поляризацією. Отже, обраний коефіцієнт а дорівнює 0,2, а l=27,5 см. З практичних міркувань для отримання задовільної форми ДН краще використовувати довгофокусні антени. Тому обираємо f = 3 м. Тоді для DjА°=2,5° отримуємо радіус R = 3,7 м, тобто відстань l між антенами А1 і А2 буде не меншою 7,4 м. За графіками на рис. 10 і за формулою (3), у якій значення U обирається 0,9, визначаємо граничне значення кутової поправки Dj°ц ГРАН однозначного визначення азимутального положення цілі. Отримуємо ![]()
Якщо ширина ДН ![]() °, сигнал відповіді може прийти під будь-яким кутом у межах цієї діаграми, але такий обмежений діапазон визначення азимута цілі є неприпустимим.
°, сигнал відповіді може прийти під будь-яким кутом у межах цієї діаграми, але такий обмежений діапазон визначення азимута цілі є неприпустимим.
У тих випадках, коли як фазовий кутовий пеленгатор використовуються антенні ґратки, поземний розмір однієї антени за тих самих вихідних вимог до ДН і рівня бокових пелюсток може становити 5…8,5 м. Для граничного випадку, коли поземний розмір антенних ґраток дорівнює 5 м, діапазон однозначного визначення азимута цілі буде дещо більшим ![]() , але і він є неприпустимим.
, але і він є неприпустимим.
Зазначений вище головний недолік фазового пеленгатора, а також деякі інші недоліки, як наприклад, конструкційні труднощі реалізації двоантенної системи, вимоги високої фазової стабільності каналів, відсутність єдиного каналу відповідей, за яким приймається додаткова інформація, труднощі в реалізації систем придушення сигналів бокових пелюсток ДН антен за запитом і відповіддю та ін. призвели до того, що на цей час у вторинних оглядових радіолокаторах фазовий принцип побудови пеленгаторів не використовується. Це саме зауваження стосується і комбінованих кутових пеленгаторів.
Похожие работы

... ість різниці фаз Dy° між сумарним і різницевим сигналами у функції кута Dj°. За позитивних значень Dj° коригувальна добавка Djц° матиме негативний знак, а за негативних – позитивний. Таким чином, амплітудні кутові дискримінатори, призначені для визначення коригувальної добавки Djц, повинні містити пристрої, що реагують не лише на співвідношення амплітуд сигналів UD і Uå, але і на різницю фаз ...
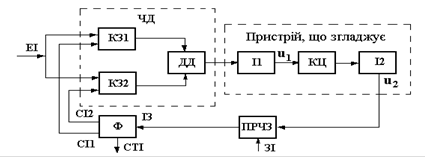
... ; для виділення періодично повторюваних імпульсів на тлі перешкод у системах зв'язку з імпульсними піднесійними. Такі системи спостереження мають назву часових автоселекторів. Функціональна схема системи подана на рис. 4. Радіолокаційний приймач відкривається (стробується) за допомогою часового автоселектора на короткі інтервали часу очікуваного приходу ехосигналу від обраної цілі. Ця міра пі ...
... ією палива, підвищенням продуктивності автомобіля в цілому і окремих його вузлів; збільшенням його ресурсу й в остаточному підсумку підвищенням коефіцієнта готовності парку. Витрати на діагностику системи запалення включають капіталовкладення на придбання й установку діагностичного встаткування, вартість займаних їм виробничих площ і експлуатаційні витрати, пов'язані із проведенням діагностики ( ...
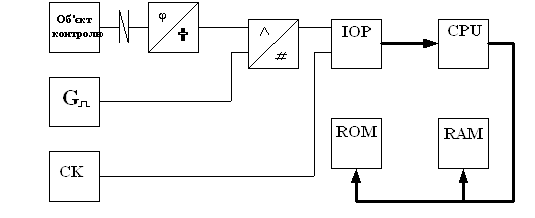
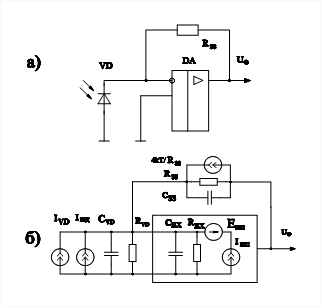
... дипломного проекту. Рисунок 3.1 – Схема електрична структурна пристрою контролю середнього значення кутової швидкості 4. Розробка принципової схеми комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом 4.1 Аналіз лінійного фотоприймача Фотоелектричні перетворювачі площа-напруга (ППН) використовуються у багатьох пристроях, таких як перетворювач ...
0 комментариев