Навигация
Алгоритм функціонування МПП
28445
знаков
20
таблиц
15
изображений
3.3 Алгоритм функціонування МПП
Як відомо, ввід інформації від АЦП може здійснюватися одним з двох способів:
1) програмним опитуванням, при якому ініціатором обміну є мікропроцесор, періодично опитуючи готовність даних;
2) режимі переривань, при якому готовність даних формує сигнал переривання для МП, в результаті чого МП переходить на підпрограму обробки переривання (ввід інформації від АЦП).
Реалізація переривання можлива або з використанням команди RST N, або з використанням контролера переривань КР580ВН59. В двійковій формі команда RST N має вигляд:
1 1 К2 К1 К0 1 1 1
де К2 К1 К0 - двійковий код числа N.
При використанні цієї команди за сигналом «Готовність даних» від АЦП на шині даних повинен бути сформований код команди RST N. Цю команду можна легко згенерувати – розряди, які дорівнюють 1, отримуються підключенням лінії даних через резистор до +5 В, а код К2К1К0 можна отримати від шифратора на 3 лінії з 8.
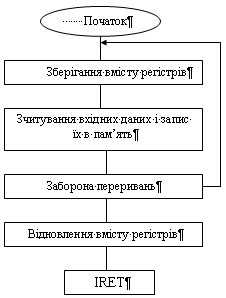
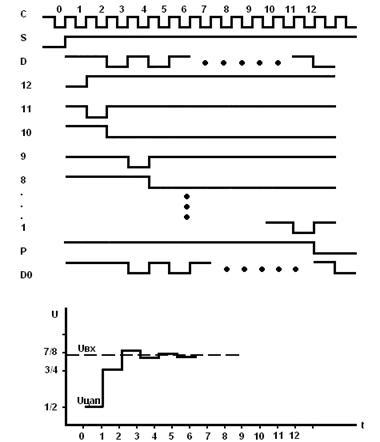
Після того, як сигнал «Готовність даних» поступає на вхід синхронізації тригера відбувається перехід від “0” до “1” і дані з входу D (“1”) передаються на вихід Q, який з’єднаний з виводом запиту переривання INT мікропроцесора. Очевидно, що ця зміна відбувається коди на вході “R” (виводі INTE) сигнал має рівень “1”, тобто переривання дозволено. Після цього мікропроцесор переходить до підпрограми обробки переривання, яка зчитує дані з портів ППІ і заносить їх в пам’ять попередньо заборонивши переривання. По завершенню роботи підпрограми обробки переривання мікропроцесор повертається до виконання головної програми, в які опрацьовуються дані зчитані обробником переривання.Потім результат записується в пам’ять і в порти виводу на ЦАП, в кінці програми дані підготовлюються для наступного повторення операцій, тобто на місце Xn-1 записується Xn, на місце Xn-2 записується Xn-1, на місце Yn-1 Записується Yn.
Блок-схема алгоритму функціонування МПС

Блок-схема підпрограми обробки переривань
4. Загальна структура програми роботи МПП
4.1 Опис програми вводу, виводу
В даній схемі використуваються два контроллери КР580ВВ55 (ППІ) з наступними адресами:
| Перша ППІ (підключена до АЦП) | Друга ППІ (підключена до ЦАП) | ||
| Порт А | 80h | Порт А | 90h |
| Порт B | 81h | Порт B | 91h |
| Порт C | 82h | Порт C | 92h |
| РКС | 83h | РКС | 93h |
Для запуску АЦП (сигнал Гашення/Перетворення) будемо використовувати розряд C0 каналу С.
Ввід-вивід інформації буде здійснюватися в режимі 1 роботи ППІ через канал А та В.
Спочатку треба ініціалізувати дві ППІ для цього виконуємо
|
| 0 | 1 | 1 | 1 | 1 | 1 | 0 |
 1
1MVIA,10111110B; запрограмували режим 1 для портів А та В на ввід.
OUT083H
| 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 |

MVIA,10101100B
OUT093H;запрограмували режим 1 для портів 2-ої ППІ на вивід
Щоб запустити АЦП необхідно використати слово маніпуляції біта, в якому в розрядах D3-D1 задається номер біта порта С, а в розряді D0 – значення яке необхідно туди записати.Ознакою слова маніпуляції біта є нуль в найстаршому розряді, розряди D6-D4 – не використовуються для слова маніпуляції біта.
Тепер запускаємо АЦП
MVIA,00000000B;встановити в „0” старший розряд каналу С
OUT083H
MVIA,00000001B; встановити в „1” старший розряд каналу С
OUT083H
Після того як АЦП перетворить вхідний сигнал у 12-розрядний двійковий код буде сформовано сигнал „Готовність даних” який через тригер встановить сигнал INT=1, аце означає що почне виконуватися обробник переривання, код якого через буферний регістр буде виставлений на шину даних . Програма обробки переривання запише дані з портів А і В ППІ у комірки пам’яті і керування повернеться до головної програми.
Текст програми обробки переривання:
IRQ:
DI;заборона переривань, щоб цей обробник не був перерваний
PUSHB
PUSHD
PUSHH
PUSHPSW
IN80H; зчитуємо з порта А в акумулятор
STA516H; записуємо у пам’ять молодший байт Xn
IN81H; зчитуємо з порта В в акумулятор
ANI0FH; виділяємо 4 молодші біти з каналу В які є 9 ,10,11 i 12 розрядом Xn
STA517H;записуємо у пам’ять старший байт Xn
POPPSW
POPB
POPD
POPH
IRET
Програма виводу інформації на ЦАП буде викликатись в кінці кожного циклу обчислення Yn і її текст виглядає так :
VYVID:
LDA520H; завантажуємо в акумулятор молодший байт результату
OUT90H; виводимо в канал А
LDA521H; завантажуємо в акумулятор старший байт результату
ANI3FH;обнулення 14 і 15 бітів
OUT91H; виводимо в канал В
RET
Похожие работы
... 4. Як графічно позначаються польові транзистори? Інструкційна картка №9 для самостійного опрацювання навчального матеріалу з дисципліни «Основи електроніки та мікропроцесорної техніки» І. Тема: 2 Електронні прилади 2.4 Електровакуумні та іонні прилади Мета: Формування потреби безперервного, самостійного поповнення знань; розвиток творчих здібностей та активізації розумово ...

... і і вибір апаратних засобів; 2) розробка прикладного програмного забезпечення; 3) комплексування апаратних засобів і програмного забезпечення; Дана робота присвячена розробці мікропроцесорного АЦП порозрядного врівноваження із ваговою надлишковістю, що калібрується. 1. Аналіз технічного завдання Для з’ясування вимог до технічного завдання, доцільно навести структуру АЦП порозрядного врі ...
... на окремих кристалах. Мікропрограмні багатокристальні МП забезпечують велику гнучкість в досягненні потрібних користувачі характеристик (в першу чергу потрібної швидкодії мікропроцесорного пристрою або мікропроцесорної системи, надаючи користувачу можливість задавати спеціалізовану систему команд, орієнтовану на певне використання. Проте при цьому проектувальник повинен розробляти мікропрограми, ...

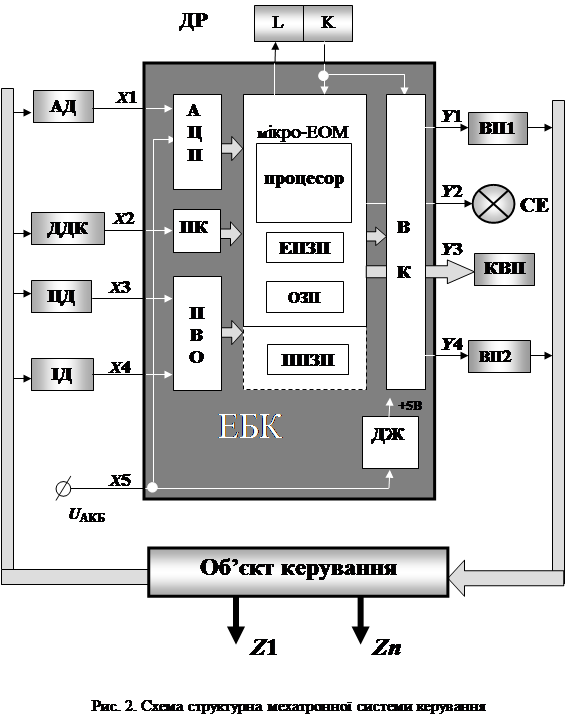

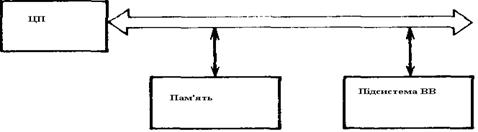
... іншими електронними системами, є наявність електронного постійно запам’ятовуючого пристрою (ПЗП) та можливість оперування інформаційними сигналами у цифровому вигляді. 2. Структура та склад мікропроцесорних систем керування АТЗ Автомобільні МП системи керування являють собою мехатронні системи, складовими яких є об’єкт керування, датчики вимірювальної інформації, виконавчі ...
0 комментариев