Навигация
2. Выбор двигателя
Правильный выбор мощности электродвигателя для редуктора имеет большое значение на практике. Если использовать редуктор при заниженной мощности двигателя, то это приведёт к уменьшению срока службы двигателя и вызовет его поломку. Использование при завышенной мощности двигателя вызовет систематическую его недогрузку и снижение КПД. Поэтому выбор двигателя должен осуществляться исходя из потребляемой мощности механизма и нагрузки, соответствовать требуемому напряжению питания [3].
Исходными данными для выбора двигателя являются расчетная мощность, которая должна соответствовать номинальной мощности двигателя, эксплуатационные условия и требования, предъявляемые к двигателю, соответствие механической характеристики условиям нагрузки, приведенные в [2].
Коэффициент полезного действия (далее - КПД) цилиндрической зубчатой передачи [2] hзп=0,9; КПД подшипников скольжения hп.с. = 0,98.
Расчет общего КПД привода для последовательно соединенной системы моментов [2]:
![]() (1)
(1)
Мощность на выходном валу рассчитаем по формуле, приведенной в [7]:
![]() , (2)
, (2)
где ![]() - статический момент нагрузки (момент сил трения, момент от несбалансированности и т.п.);
- статический момент нагрузки (момент сил трения, момент от несбалансированности и т.п.);
J - момент инерции подвижной части нагрузки;
![]() - угловое ускорение;
- угловое ускорение;
![]() - общий коэффициент полезного действия привода.
- общий коэффициент полезного действия привода.
Согласно требуемому заданию, есть нагрузки на выходное звено – 0.09 Нм.
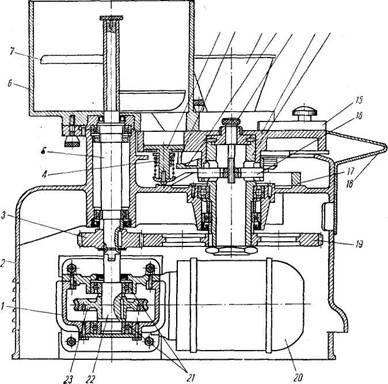
Учитывая расчетную мощность двигателя, параметры напряжения питания -27 В, а также требование крепления редуктора торцевое фланцевое, выбран двигатель ДПР-32-Ф5 из таблицы [4].
Двигатели серии ДПР выполняются с возбуждением от постоянных магнитов, с полым бескаркасным якорем. Двигатели объединены в несколько серий, отличающихся друг от друга основными параметрами, режимами работы и условиями эксплуатации. Двигатель каждой серии имеет четыре конструктивных исполнения:
Н1, Н4, Н5 – нормальное с одним выходным концом вала;
Н2, Н7, Н8, Н9 – нормальное с двумя выходными концами вала (размеры концов вала одинаковые);
Ф1, Ф4, Ф5 – фланцевое с одним выходным концом вала;
Ф2, Ф7, Ф8, Ф9 – фланцевое с двумя выходными концами вала.
Кроме двигателей, объединенных в серию, имеются модификации, выполненные в одном конструктивном исполнении (ДПР-32-Ф1-13, ДПР-42-Ф1-05, ДПР-72-Н5-05), а также двигатели с таходатчиком (ТИ или ТС) и с электронными регуляторами частоты вращения (РС), выполненными в виде отдельного блока.
Крепление двигателей исполнения Н производится за корпус с помощью охватывающих его металлических деталей, а исполнения Ф – за фланец.
Регуляторы частоты вращения подразделяются на статические (РС-3) и астатические (РС-0). Для двигателей с астатическими регуляторами напряжения внешней синхронизации (40±3) В частотой (1000±0,25) Гц синусоидальной или прямоугольной формы. Не допускается включение РС на обратную полярность, поскольку это может привести к выходу их из строя.
Режим работы – продолжительный. Двигатели ДПР-Н4, Н7, Ф4, Ф7 могут также работать при повторно-кратковременном реверсивном режиме при питании напряжением синусоидальной формы, амплитудой до 6 В, частотой для двигателей ДПР-42, 52 до 6 Гц, ДПР-62, 72 до 2,5 Гц (продолжительность работы не более 60 мин с последующим перерывам не менее 60 мин).
Двигатели ДПР-Н5, Н9, Ф5, Ф9 предназначены для работы также при питании от широко-импульсного модулятора, обеспечивающего среднее значение напряжения на выходных концах двигателя 20 В, частоту следования импульсов не менее 500 Гц и скважность импульсов не менее 0,2, форма импульса – прямоугольная.
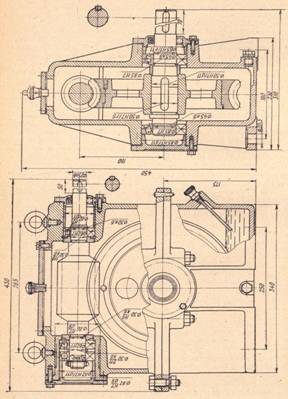
Габаритные и установочные размеры двигателя приведены приложении А.
3. Определение общего передаточного отношения
Общее передаточное отношение редуктора определяется по формуле, приведенной в [3]:
![]() , (3)
, (3)
где ![]() общее передаточное отношение редуктора,
общее передаточное отношение редуктора,
![]() - угловая скорость на входе редуктора, т.е. угловая скорость двигателя,
- угловая скорость на входе редуктора, т.е. угловая скорость двигателя,
![]() - угловая скорость вращения выходного вала (нагрузки).
- угловая скорость вращения выходного вала (нагрузки).
![]()
![]()
Определим оптимальное число ступеней редуктора и распределение общего передаточного отношения по ступеням по методике, предложенной в [3].
Исходя из условия минимума габаритов и равенства передаточных отношений число ступеней:
![]() . (4)
. (4)
Передаточные отношения каждой ступени редуктора равны:
![]() (5)
(5)
Похожие работы
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
... при проектировании машины, т.е. соответствия этого выбора действующей нормативной документации (НД). 3. Построение компоновки цилиндрического двухступенчатого редуктора Задачей курсовой работы является построение и параметризация компоновочного чертежа многоступенчатого редуктора, поэтому кинематические расчеты производиться не будут и за основу взята модель ранее спроектированного редуктора. ...
... , наклонные; · По особенностям кинематической схемы – на развернутую, соосную, с раздвоенной ступенью. Конструктивные особенности одноступенчатых редукторов. Цилиндрический редуктор На рис. 1 показан общий вид одноступенчатого горизонтального редуктора с цилиндрическими колесами для передачи вращающего момента между двумя параллельными валами. Основная характеристика данного редуктора ...

... конструкции обычных и скоростных пассажирских Л., грузовых Л. применяют для обслуживания предприятий общественного питания. Основные параметры Л., размеры кабин, шахт, машинных и блочных помещений регламентированы ГОСТами, на основе данных которых увязывают механические и строительные части установок, разрабатывают серии унифицированных Л., обеспечивающих любое архитектурно-планировочное решение ...
0 комментариев