РГРТУ
Пояснительная записка
к курсовому проекту
по дисциплине
Теоретические основы радиоэлектронной борьбы
Студент
Ходорченко Виталий Валерьевич
Группа 311
Специальность 210305
2007
Введение
Задачи обеспечения помехопостановки (помехи радиоприему) и помехозащиты (помехоустойчивости) являются взаимосвязанными и противоборствующими сторонами. Часто они (задачи) используются в комплексе, с одной стороны, необходимо забить противника помехами для срыва его нормальной работы, а с другой стороны, обеспечить хорошую помехоустойчивость своей РЛС, то есть обеспечить подавление активных помех, применяемых противоборствующей стороной, и пассивных, связанных с тем или иным способом их создания.
Помехоустойчивость технического устройства (системы) ─ это способность устройства (системы) выполнять свои функции при наличии помех. Помехоустойчивость оценивают интенсивностью помех, при которых нарушение функций устройства ещё не превышает допустимых пределов. Чем сильнее помеха, при которой устройство остаётся работоспособным, тем выше его помехоустойчивость. Многообразие устройств и решаемых ими задач, с одной стороны, и видов помех — с другой, приводят к необходимости специализированного подхода при рассмотрении помехозащиты в каждом конкретном случае. Требования к помехоустойчивости различных устройств отличаются большим разнообразием: так, в радиолокационных системах иногда считают допустимым пропуск отдельных радиолокационных станцией (за время однократного обзора контролируемой ею области пространства) до половины объектов, подлежащих обнаружению, а в системах передачи данных, использующих ЭВМ, часто недопустима потеря даже одного передаваемого знака из чрезвычайно большого их числа (например, ~ 109). Оценка рассматриваемого параметра может производиться на основе соотношения между помехой и сигналом, при котором обеспечивается заданное качество функционирования, например в радиолокации — отношения сигнала к помехе, при котором обеспечивается заданная достоверность обнаружения (вероятность правильного обнаружения при определённой вероятности ложной тревоги). При известных статистических характеристиках сигналов и помех может быть теоретически определена максимальная достижимая помехоустойчивость. Осуществление «оптимальных» устройств, реализующих такую устойчивость, обычно слишком сложно, а их неизбежные технические несовершенства не позволяют достичь её в полной мере. Поэтому обычно довольствуются устройствами, которые при наибольшей их простоте обеспечивают хорошее приближение к оптимальному устройству. Устойчивость к помехам, при действии аддитивных помех, может быть увеличена повышением мощности передаваемых сигналов. При действии пассивных помех (в радиолокации) увеличением мощности сигнала существенного повышения устойчивости не дает, и требуется радикальное изменение используемых методов, например применение помехоустойчивого кодирования либо самонастраивающегося (адаптивного) приёма.
Помехи радиоприёму представляют собой электромагнитное излучение, воздействующее на цепи радиоприёмника, электрические процессы в самих цепях, которые препятствуют правильному приёму сигнала и не связаны с этим сигналом посредством известной функциональной зависимости, а также искажения сигнала при распространении радиоволн. Действие помехи проявляется в случайных (непредсказуемых) искажениях формы принимаемого сигнала, приводящих к искажениям формы изображения на экране кинескопа и т.д. В зависимости от происхождения их подразделяют на космические, атмосферные, индустриальные, умышленные (организованные), помехи от др. радиостанций, помехи, обусловленные особенностями распространения радиоволн, а также собственные шумы радиоприёмника. В зависимости от характера воздействия на сигнал различают аддитивные и мультипликативные (неаддитивные) П. р. Аддитивная помеха проявляет себя независимо от сигнала. Действия сигнала и аддитивной помехи складываются. Мультипликативная помеха возникает только при наличии сигнала. Её действие проявляется в нерегулярном изменении уровня сигнала. Пример аддитивной помехи — собственный шум радиоприёмника, мультипликативной — эффект замираний.
Анализ задачи и ее формализация
Задачей данной курсовой работы является:
· расчет параметров бортовой РЛС (БРЛС), определяющей скорость и азимут летательного аппарата (ЛА) противника;
· расчет параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех);
· расчет зон прикрытия помехами;
· составление структурной схемы устройства;
· анализ эффективности применения помех и средств помехозащиты;
· оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон.
Расчет параметров БРЛС будем производить в программной среде «Стрела». За основу возьмем:
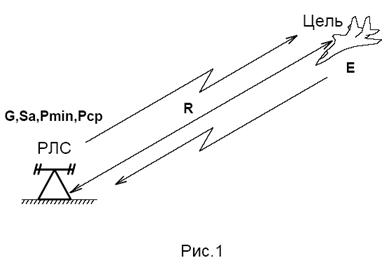
· в качестве носителя РЛС - МиГ-31 рис.1 (технические характеристики смотрите в приложении);
· тип станции - импульсно-доплеровская РЛС “БАРС” рис. 2 (технические характеристики смотрите в приложении);
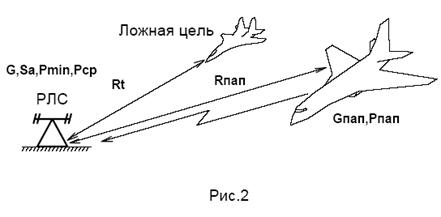
Расчет постановщика помех будем производить, опираясь на результаты расчета в программной среде «Стрела». В качестве носителя станции помехопостановки выберем американский самолет-истребитель F-15 С рис.3.
При расчете необходимо учесть пассивные помехи, отражения от подстилающей поверхности, т.о. нужно предварительно подсчитать значения ЭПР помехи в м2. В качестве активной помехи в Т.З. определенна активно-шумовая помеха. Требуется в ходе работы определить необходимую мощность помехопостановщика и выбрать структурную схему, позволяющую реализовать данную помеху. С другой стороны, требуется обеспечить нормальную работу БРЛС в условии действия помехи, применяемой по МИГ-31. По окончании расчетов сделаем вывод об эффективности работы помехопостановщика и помехозащиты.
Современные БРЛС являются сложными, комплексными, иерархически построенными информационными системами. Сложность БРЛС определяется ее способностью решать одну и ту же задачу различными способами с использованием различных процедур (алгоритмов) обработки сигналов. Термин «комплексная система» характеризует то обстоятельство, что для получения нужной информации с требуемой точностью и достоверностью в БРЛС используются и датчики другой физической природы (инерциальные, оптические и т.д.). Понятие «иерархическая система» подразумевает определенную соподчиненность различных подсистем и устройств БРЛС в процессе совместной обработки сигналов (информации), дающую возможность снизить аппаратурные и вычислительные затраты.
В общем случае БРЛС предназначена для информационного обеспечения процедур наведения и зашиты летательных аппаратов и управления их средствами поражения. Для решения этих задач необходимо иметь разветвленную сеть режимов работы. К этим режимам, прежде всего, относятся:
поиск и обнаружение воздушных и наземных целей с определением их государственной принадлежности;
сопровождение целей, при котором формируются оценки фазовых координат, необходимые для информационного обеспечения всех используемых методов наведения и уклонения от средств поражения;
идентификация (распознавание) целей вплоть до их типа с ранжированием по степени важности (опасности);
выдача команд целеуказания средствам поражения и формирование для них команд радиокоррекции.
В качестве вспомогательных, но имеющих важное значение, можно отметить режимы информационного обеспечения автоматической дозаправки в воздухе и автономной автоматической посадки, в том числе и необорудованные в радиотехническом отношении аэродромы (посадочные площадки).
Следует отметить, что БРЛС является составной частью системы более высокого уровня иерархии, именуемой системой управления вооружением и обороной (СУВО) самолета (вертолета), либо информационно вычислительной системой.
В процессе поиска целей БРЛС просматривает определенную зону пространства, порядок просмотра которой определяется решаемыми задачами и видом используемой антенны. После обнаружения целей БРЛС переходит к их автоматическому сопровождению. При этом может сопровождаться как одиночная цель, так и групповая со значительным разносом элементов группы по пространству. На основе информации, извлекаемой из радиосигналов в БРЛС формируются оценки всех фазовых координат хрлс, используемых для наведения самолета-носителя и выдачи команд целеуказаний средствам поражения и сопрягаемым системам (например, оптико-электронным) для резервированного подслеживания за целью. Кроме того, в БРЛС могут формироваться и некоторые информационные признаки (признак маневра (ПМ) цели, признак типа цели (ПТЦ) по принятой классификации, приоритета опасной цели (ПОЦ), признак помех и ряд других), способствующие адаптации летчика к окружающей обстановке.
Спецификой современного состояния авиации является то, что существенно возросли возможности самолетов-носителей по изменению своего углового и пространственного положения, расширилось поле значений и законов изменения скоростей и ускорений перемещений, качественным образом изменились возможности авиационных средств поражения. Кроме того, бурное развитие прикладных сторон фундаментальных наук, возрастающие способности датчиков различной физиче- ской природы извлекать из геофизических полей все больший объем информации и все возрастающие возможности вычислительных систем по объему памяти и быстродействию, применение новых технологий дают возможность все полнее удовлетворять требованиям информационного обеспечения все усложняющихся видов и способов боевых действий на земле и в воздухе.
Расчет параметров средств помехозащиты
Как уже отмечалось ранее, расчет будем вести в программной среде «Стрела». Запустив исполнительный файл программы, выберем закладку «Исследование», а затем «Расчет параметров РЛС - классический метод»
В появившемся окне «Параметры системы» требуется указать параметры РЛС согласно техническому заданию:
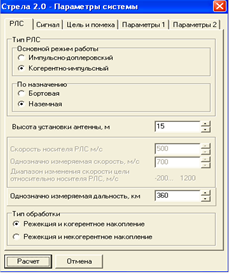
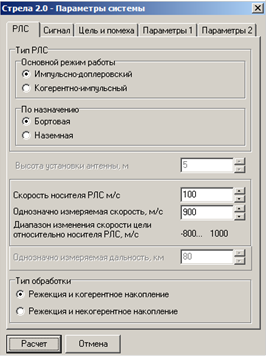
· в закладке «РЛС» рис.5, укажем в качестве «Основного режима работы» - импульсно-доплеровский. Такой выбор связан с тем, что импульсно-доплеровские БРЛС по сравнению с импульсными станциями с режимом СДЦ обладают существенно лучшими характеристиками по обнаружению цели на встречных курсах на фоне земли. «По назначению» - бортовая РЛС. «Скорость носителя РЛС в м/с» - 3000 км/час (соответствует скорости МИГ-31 на высоте 17500 м) или ≈ 833 м/с. «Однозначно измеряемая скорость м/с» -830 м/с (соответствует ТЗ). «Тип обработки» - режекция и когерентное накопление.
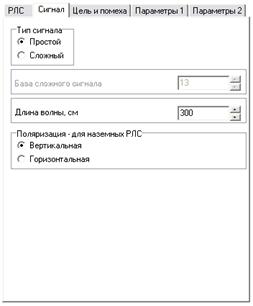
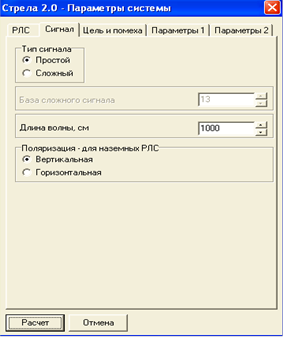
· в закладке «Сигнал» рис.6, укажем в качестве «Типа сигнала» - простой. «Длина волны, см» - 3, такой выбор связан с тем, что близко с этим значением (3,3 см) расположено окно прозрачности, следовательно, меньше затухание в среде.
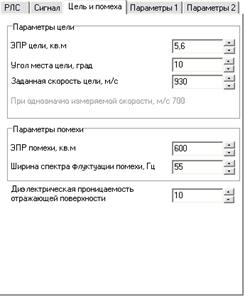
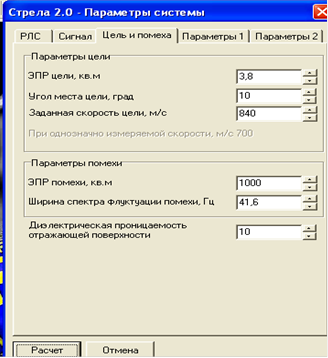
· в закладке «Цель и помеха» рис.7 укажем «ЭПР цели кв.м» - 3,6 (в соответствии с ТЗ). «Максимальна скорость цели, м/с» - 830 м/с (в соответствии с ТЗ), но т.к. скорости F-15 С на высоте 14000 м ≈ 736 м/с ее и возьмем за исходную. «ЭПР помехи» - 825 м2 (расчет и рассуждения см. ниже). «Ширина спектра флюктуаций, Гц» - 10934.
Для ввода ЭПР помехи требуется ее рассчитать, что и сделаем ниже. Существует множество способов учета отражений от подстилающей поверхности. Для решение таких задач в режиме квазинепрерывного импульса (КНИ) посредством выбора частот повторения зондирующих импульсов выделяется для частотного спектра отраженного сигнала подвижной цели поддиапазон доплеровских частот, свободный от отражений подстилающей поверхности. Фактически создаются условия обнаружения цели на фоне собственных шумов приемника БРЛС.
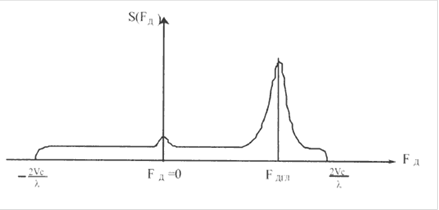
Импульсно-доплеровские РЛС, как известно, используют метод станций, работающих на непрерывном излучении. Спектр доплеровского сигнала, отраженного от поверхности земли с летящего объекта, представлен на рис. 8 На нем значению мощности сигнала S(Fд) в области доплеровской частоты Fд = 0 соответствуют высотные отражения от точек подстилающей поверхности вблизи нормали, которая проведена с самолета на землю. Области частот Fдгл соответствуют отражению по оси луча антенны РЛС, скользящего по поверхности земли со скоростью перемещения самолета в горизонтальной плоскости.
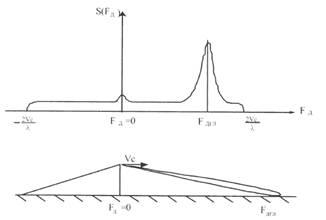
Как видно на рис.8, при скоростях сближения с целью, больших скорости самолета, отсутствуют сигналы, отраженные от земли, поэтому при атаке сверху вниз в переднюю полусферу цели отсутствует загрубление чувствительности приемника и дальность обнаружения цели РЛС оказывается такой же, как и в свободном пространстве. При атаке в заднюю полусферу цели, имеет место загрубление чувствительности приемника за счет сигналов, принимаемых по боковым лепесткам диаграммы направленности антенны. При этом, чем ниже высота полета самолета, тем больше загрубление приемника и, следовательно, меньше дальность обнаружения цели.
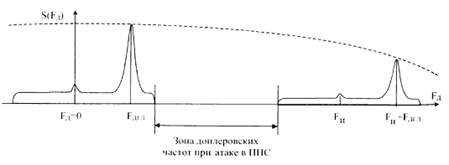
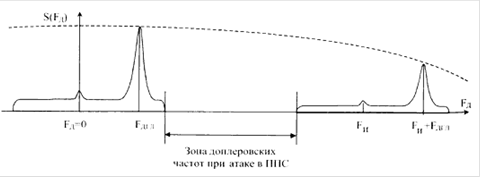
Поскольку для РЛС самолета не представляется возможным реализовать метод непрерывного излучения, так как невозможно разместить две антенны в носовой части самолета, был предложен импульсно-доплеровский метод с высокой частотой повторения (ВЧП) излучения зондирующих импульсов. Этот метод заключается в том, что при атаке в переднюю полусферу цели выбирается частота повторения импульсов Fп большая, чем максимальная доплеровская частота цели. Периодически излучаемые зондирующие когерентные импульсы можно рассматривать как сумму гармонических составляющих с частотами fk = f0 + kFп, где f0 - несущая частота РЛС, a k - любое целое число. Каждая составляющая с частотой fk подобна непрерывному зондирующему сигналу; максимальное и минимальное доплеровское приращение частоты сигналов, отраженных от подстилающей поверхности, образуется как 2Vc/Ak и -2Vc/Аk соответственно, где Аk = = c/fk, а с - скорость распространения радиоволн. При этом, значение мощности доплеровского сигнала отражения от земли по каждой составляющей модулирируется в соответствии с огибающей спектра зондирующих импульсов Sт. В результате этого спектр отраженного от земли доплеровского сигнала имеет вид, показанный на рис. 9.
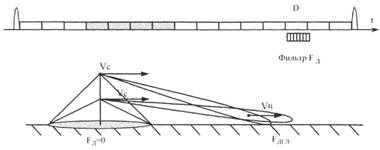
При атаке с задней полусферы цели применяется метод средней частоты повторения (СЧП) излучения зондирующих импульсов. При этом анализируются доплеровские частоты ниже "пика земли" (Fдгл). Получается неоднозначное измерение дальности до цели и скорости сближения с ней. Весь интервал однозначной дальности для выбранного периода повторения зондирующих импульсов разбивается на равные интервалы Dp, соответствующие разрешающей способности РЛС по дальности, и в каждом из них производится частотный анализ в диапазоне доплеровских частот цели. Иллюстрацией разбиения временной оси для "нарезки" интервала однозначного определения дальности до цели является рис. 10.
Если исключить определенное количество участков по дальности, соответствующих высоте полета самолета, при которой загрубление приемника не обеспечивает необходимую дальность обнаружения цели, то при снижении самолета дальность, на которой осуществляется прием отражений от земли, не будет уменьшаться, как и дальность обнаружения цели. При изменении частоты повторения зондирующих импульсов обеспечивается обнаружение цели на участках дальности, где были "заперты" приемники РЛС. Отсутствие в режиме КНИ средней частоты повторения импульсов в доплеровском диапазоне частот зон, свободных от отражений подстилающей поверхности, осложняет процесс обнаружения цели. Он становится зависимым от типа подстилающей поверхности. Причем, в силу наличия селекции по дальности и скорости, режиму КНИ СЧП свойственно собирать фон подстилающей поверхности от отдельных ее участков, которые, естественно, по-разному отражают зондирующие сигналы БРЛС.
Для малых по сравнению с длиной волны и пологих неровностей применим метод возмущений (мелкомасштабная модель). Отраженная волна представляется в виде суммы волн от гладкой поверхности, определяемой коэффициентами отражения Френеля и обусловленной мелкими неровностями. Если радиус кривизны неровностей много больше длины волны для плавных неровностей достаточно больших размеров, применим метод Кирхгофа (крупномасштабная модель). При этом отраженное поле вычисляется по законам геометрической оптики, т.е. так же, как при отражении от бесконечной касательной плоскости в данной точке поверхности. С учетом того, что в этой модели затенение одних участков поверхности другими отсутствует, можно воспользоваться коэффициентами отражения Френеля.
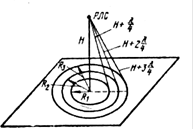
При оценке участка гладкой поверхности, эффективно участвующего в формировании отраженного сигнала в сторону РЛС, можно воспользоваться зонами Френеля. Рассмотрим случай вертикального облучения земной поверхности. Метод построения зон ясен из рис. 11.

Для первой зоны разность хода лучей до центра зоны и до любой точки внутри зоны не превышает λ/4, что после отражения на границе зоны соответствует разности хода λ/2, т. е. фазовому сдвигу 180°. Остальные зоны строятся аналогично. Отсюда следует, что первая зона является кругом с радиусом:
![]()
так как обычно H >> λ/4, где H – высота БРЛС над землей.
Что касается остальных зон, то они образуют кольца. Вторая зона имеет внутренний радиус R1 и внешний:
![]()
последующие радиусы равны:
![]()
![]()
и т. д. Так как площадь k-го кольца:
![]()
т. е. площади колец зон равны. Вследствие того, что сигналы, отраженные от этих зон, имеют разные знаки, происходит их взаимная частичная компенсация и результирующий отраженный сигнал соответствует приблизительно половине формируемого первой зоной Френеля, что и определяет главную роль этой зоны.
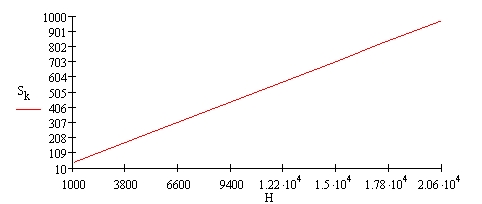
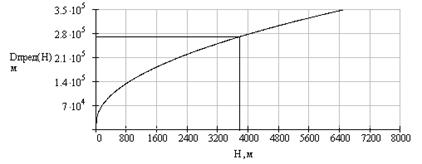
Произведем расчет ЭПР помехи от подстилающей поверхности на разных высотах носителя БРЛС, результаты сведем в таблицу 1.
Таблица 1.
| H, м | 20 600 | 17 500 | 15 000 | 10 000 | 5 000 | 1 000 |
| Sk, м2 | 970.752 | 824.668 | 706.858 | 471.239 | 235.619 | 47.124 |
По результатам построим зависимость Sk=f(H) рис.12.
При расчете мощности и спектра отражений от поверхности земли можно использовать геометрические представления. Совместим начало координат с носителем РЛС, которая работает в импульсном режиме, и аппроксимируем диаграмму направленности антенны в виде главного лепестка и сплошной сферы боковых лепестков.
Тогда поверхность земли, точки которой являются источником отражений, формирующих сигнал пассивной помехи на входе приемника в каждый момент времени, представляет собой кольцо, ширина которого пропорциональна длительности зондирующего импульса τи, а радиус определяется текущей задержкой отраженного импульса в пределах однозначной дальности.
В режиме низкой частоты повторения (НЧП) образуется одно кольцо, которое последовательно перемещается в пределах от минимума до максимума однозначной дальности, что показано на рис. 13.

В тех же пределах в режиме высокой частоты повторения (ВЧП) и средней частоты повторения (СЧП) одновременно на поверхности земли образуется система колец, расстояние между которыми пропорционально периоду повторения Т (рис. 14).
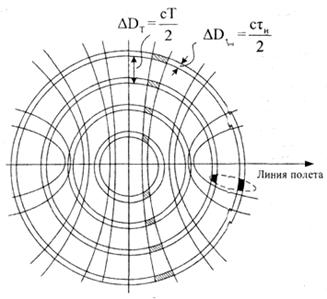
Рис. 14 соответствует одному рассматриваемому моменту времени. Пунктиром показаны помехи по главному лепестку диаграммы направленности. Отраженный сигнал от земной поверхности в режиме ВЧП и СЧП приходит в приемник с нескольких колец дальности одновременно. Число таких колец определяется следующим образом:
![]()
Где D0 – однозначная дальность, ΔDт – дальность, соответствующая периоду повторения Т.
Учитывая в согласованном фильтре многоканальную обработку по частоте, отраженный сигнал с колец дальности рассортируем по доплеровской частоте.
Нанесем на кольца дальности (рис. 14) линии равных доплеровских частот, называемых изодопами. Изодопы имеют вид гипербол и определяются скоростью носителя РЛС. Ширина изодопы соответствует полосе пропускания доплеровского фильтра Δf.
В результате построения на земной поверхности образуются участки, суммарная площадь которых определяет мощность отражений от земной поверхности в одном фильтре обработки. На рис. 14 для одной изодопы эти участки заштрихованы.
Суммарная площадь участков определяется числом колец дальности, которые пропорциональны периоду повторения Т. В режиме СЧП число колец дальности получается меньше по сравнению с ВЧП, на основании чего площадь отражений от земной поверхности уменьшается.
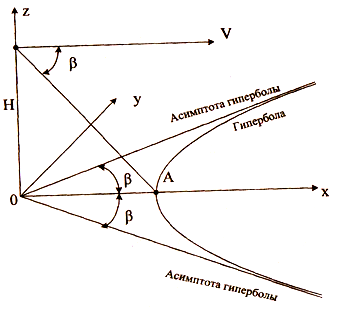
Приведем методику расчета мощности помех, соответствующих отражениям от земли. Считаем известными путевую скорость полета носителя V, высоту полета Н, ширину доплеровского фильтра Δf, период повторения РЛС Т, максимальную однозначную дальность D0, длину волны λ и длительность зондирующего импульса τи. Линия полета носителя совпадает с осью х, по которой располагается координата дальности, что показано на рис. 15
помехозащита импульсный помеха сигнал

Для любого угла места β частота Доплера:
![]()
Определим угол Δβ, соответствующий полосе пропускания доплеровского фильтра ДГ и пропорциональный ширине линии изодопы:
![]()
Построим изодопу для выбранного угла β в пространстве, в координатах х,у,z (рис.16).
Расчеты показывают, что для гиперболы, построенной из точки А (рис. 15) в плоскости х,у, лежащей на земной поверхности, углы асимптот всегда равны углу β. На рис. 17 приведенная ранее изодопа представлена в плоскости х,у.
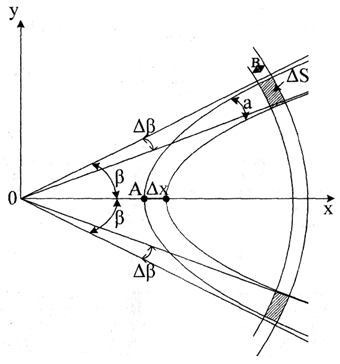
Величина Δх (рис. 15) определяет ширину линии изодопы на земной поверхности, пропорциональной величине Δf.
Если по ширине изодопы провести асимптоты, то угол между ними составит величину Δβ, такую же как на рис. 15. Следовательно, ширина изодопы при ее продолжении увеличивается пропорционально величине Δβ. Тогда площадь участка ΔS, определяемого пересечением изодопы и кольца дальности ΔS=ab, где a ─ сторона, определяемая наклонной дальностью D и величиной Δβ и b ─ сторона, которая пропорциональна длительности τи. На основании изложенного площадь одного участка, соответствующая первому кольцу дальности ΔS, определяется:
![]()
· в закладке «Параметры 1» рис.18 укажем «Мощность передатчика, кВт» - 5, «Коэффициент усиления антенны» - 10000, «Энергетическая дальность, км» - 123, «Разрешение по дальности, м» - 200, «Вероятность правильного обнаружения» - 0,95, «Вероятность ложной тревоги» - 10-6, «Потери при обработке, дБ» - 3.
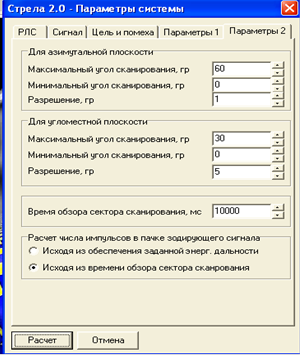
· в закладке «Параметры 2» рис. 19 укажем для азимутальной плоскости: «Максимальный угол сканирования, гр.» - 70, «Минимальный угол сканирования, гр.» - (-70), «Разрешение, гр» - 5; для угломестной плоскости: «Максимальный угол сканирования, гр.» - 20, «Минимальный угол сканирования, гр.» - (-20), «Разрешение, гр» - 5; «Время обзора сектора сканирования» - 1,28 с. Расчет числа импульсов в пачке зондирующего сигнала вести, исходя из времени обзора сектора сканирования.
Значения, указанные в закладках «Параметры 1» и «Параметры 2» были выбраны согласно ТЗ и характеристикам БРЛС "БАРС" см. приложение. Теперь программа выполнит расчет параметров РЛС, согласно принятым параметрам, рис. 20.
В программной среде «Стрела» имеется возможность отображения некоторых результатов в виде зависимостей, которые представлены на рис. 21.
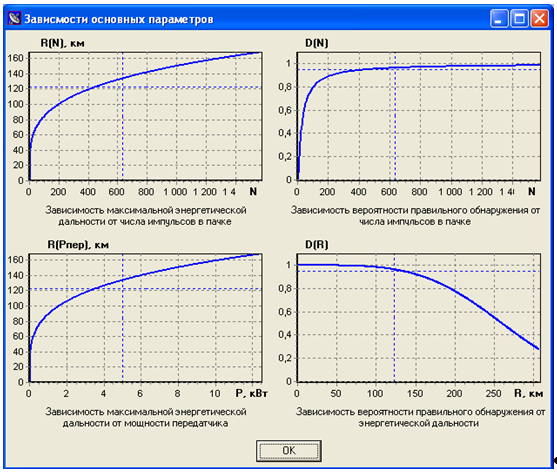
Как видно из рис. 21:
· увеличение числа импульсов в пачке приводит к большему значению энергетической дальности, что можно объяснить непосредственной связью числа импульсов в пачке N с коэффициентом передачи сигнала kс(kс= N), а последнее связано с энергетической дальностью R, причем чем больше kс, тем больше R [5].
· увеличение N приводит к повышению вероятности правильного обнаружения D, что вполне удовлетворяет теории [5].
· дальность связана с мощностью передатчика основным уравнением дальности радиолокации (как корень четвертой степени), согласно которому увеличение мощности приводит к возрастанию энергетической дальности.
· увеличение энергетической дальности приводит к уменьшению значения правильного обнаружения, связанно данное явление может быть с тем, что на больших дальностях хуже разрешение целей, больше сказывается влияние среды на распространяющуюся волну и многие другие факторы.
Как ранее отмечалось, требуется обеспечить защиту БРЛС от пассивных помех в виде подстилающей поверхности.
Способы оптимальной обработки сигналов в импульсно-доплеровской РЛС
В режиме ВЧП обнаружение сигналов от целей ведется на фоне шума приемника. Отраженный сигнал от цели представляет пачку радиоимпульсов с неизвестной доплеровской частотой, которая подвергается когерентной обработке. Чтобы учесть доплеровский сдвиг частоты, широко используются гребенчатые фильтры, представляющие набор узкополосных фильтров, осуществляющих когерентное накопление.
Ожидаемую пачку импульсов (копию сигнала) u(t) можно представить в виде произведения двух колебаний: последовательности видеоимпульсов u1(t) и высокочастотного колебания u2(t) несущей частоты f0, модулированного огибающей пачки, т.е.
u(t)= u1(t) u2(t),
которое соответствует ожидаемому сигналу. Если аддитивную смесь сигнала с шумом на входе приемника обозначить y(t), то отклик согласованного фильтра даёт на выходе корреляционный интеграл R:
Откуда вытекает следующий оптимальный алгоритм обработки пачки радиоимпульсов: принимаемая реализация колебаний y(t) стробируется. При этом получается колебание u(t)=u1(t)u2(t). Стробирование необходимо осуществлять в соответствии со временем запаздывания сигналов. При неизвестном времени запаздывания необходима многоканальная схема. Каждый временной канал относительно соседнего стробируется импульсной последовательностью, задержанной на длительность одного импульса пачки τи. Тогда число временных каналов m в одном периоде повторения Т определяется m=T/τи и соответствует величине скважности. В каждом канале дальности необходимо осуществить накопление сигналов пачки, т.е. вычислить интеграл. Интегрирование осуществляется узкополосным фильтром.
При неизвестной доплеровской частоте цели в каждом стробируемом канале число доплеровских фильтров должно быть таково, чтобы перекрывать весь диапазон доплеровских частот, который в импульсных системах. благодаря периодичности спектра, можно принять равным Fп.
Таким образом, согласованный фильтр обработки имеет структуру, представленную на рис. 22.
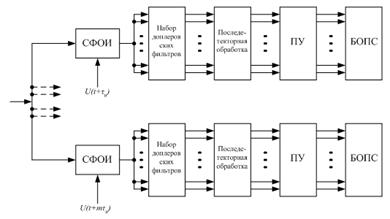
Согласованные фильтры одиночного радиоимпульса (СФОИ) стробируются по дальности с числом временных сигналов m. В каждом канале ставятся узкополосные доплеровские фильтры, перекрывающие доплеровский диапазон целей, где производится накопление сигнала. Детектирование огибающей сигнала осуществляется в блоке последетекторной обработки, на выходе которого в пороговом устройстве (ПУ) происходит сравнение с пороговым уровнем с целью обнаружения сигнала. В блоке определения параметра сигнала (БОПС) определяются параметры цели, такие как скорость, дальность и т.д.
При обнаружении цели определяется доплеровская частота цели по номеру доплеровского фильтра и рассчитывается скорость цели:
![]()
Практически вместо СФОИ лучше использовать усилитель промежуточной частоты (УПЧ), параметры которого согласованны с параметрами сигнала, а узкополосные доплеровские фильтры выполнить в виде блока цифровой обработки, включающего память на всю пачку и обработку на основе быстрого преобразования Фурье (БПФ). Тогда согласованный фильтр имеет структуру, представленную на рис. 23.
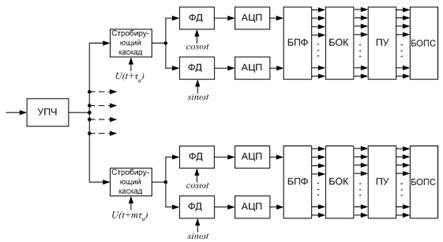
Стробирование по дальности выполняется в стробирующих каскадах, подключенных к выходу УПЧ, на которые подаются временные стробы длительностью τи. Количество стробирующих каскадов равно m.
Обработка по частоте Доплера в каждом временном канале производится на видеочастоте, в двух квадратурных каналах, где с помощью фазовых детекторов (ФД) полезная информация из фазы переходит в амплитуду. Для цифровой обработки необходимо информацию с выхода ФД преобразовать в цифровые коды, что выполняется с помощью аналого-цифровых преобразователей (АЦП).
Блок, обозначенный как БПФ, включает память на всю пачку отраженных импульсов и обработку в виде БПФ.
На выходе БПФ образуется n частотных каналов, где n - число импульсов в пачке, отраженной от цели. Полоса пропускания каждого доплеровского фильтра в этом случае будет:
![]()
В БПФ производится когерентное накопление сигнала y(t). Объединение квадратурных каналов производится в блоке объединения квадратур (БОК), причем объединение производится для каждого частотного канала. Обнаружение полезного сигнала происходит на выходах многоканального (n каналов) порогового устройства (ПУ). Дальнейшая обработка в виде фиксации обнаружения и измерения параметров цели производится в блоке определения параметров сигнала (БОПС).
Величина порогового сигнала q на выходе когерентного накопителя:
![]()
Где qвх – отношение напряжения полезного сигнала (uсвх) к среднеквадратическому значению шума (σшвх) на входе устройства обработки.
Структура фильтра, представленного на рис. 23, реально в цифровом виде выполняется на одном АЦП и спецпроцессоре с одним БПФ. Многоканальность по времени реализуется за счет разбиения по временным тактам работы АЦП и БПФ.
На рис. 24 приведены спектры соседних гармоник, отраженных от пассивных помех, от цели и с учетом частотной характеристики согласованного фильтра, выполненного в виде многоканального доплеровского фильтра, показанного на рис. 22 для режима ВЧП.
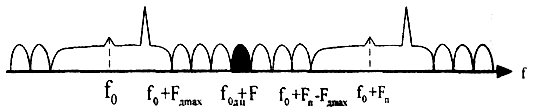
Аналогичный спектр на рис. 25 представлен при выполнении многоканального доплеровского фильтра в виде БПФ, структурная схема которого показана на рис. 23.
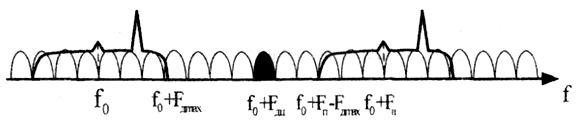
Особенность обработки, показанной на рис. 24, состоит в том, что доплеровские фильтры расположены в зоне спектра, свободного от пассивной помехи. При изменении скорости носителя РЛС меняется положение точек f0±Fдmах, что приводит к изменению зоны спектра, свободного от пассивных помех. В этом случае для перекрытия всей зоны спектра, где может находиться полезный сигнал, следует производить адаптивную привязку начала гребенки доплеровских фильтров к скорости носителя РЛС (к точке f0±Fдmах).
В случае использования БПФ (рис. 25) по ширине спектра пассивных помех Fдmах рассчитывают количество частотных каналов БПФ, в которых находится помеха, и эти каналы в обнаружении полезного сигнала не участвуют. Из всего анализа можно сделать вывод, что схема рис. 23 хоть и сложнее схемы рис. 22, но обеспечивает лучшие результаты, так как учитывает изменение скорости носителя РЛС (для избавления от пассивной помехи выберу эту схему).
В техническом задании также указана активная помеха (АП) – уводящая по скорости. Такой тип помех используется для обеспечения срыва автосопровождения цели по координатам (дальности, скорости). В отличие от помех типа ложная цель, уводящие помехи динамически изменяют свои параметры, т.е. принимая сигнал от РЛС, они преднамеренно изменяют в нем какой-либо параметр (вносят дополнительную задержку, изменяют фазу и др.), после чего переизлучают его в направлении станции, тем самым, обеспечивается автозахват ложной цели и ее сопровождение. Бороться с такой помехой можно, с помощью следующего алгоритма:
скоростно-пороговый алгоритм заключается в следующем:
![]()
Если равенство выполняется, то параметры дальности R и скорости V согласованы и идет сопровождение цели. Если не выполняется, то это уводящая помеха. Иначе говоря, зная, что скорость есть первая производная от дальности, сравнивая оценку с вычисленной скоростью можно сделать вывод о наличии или отсутствии помехи.
![]() ,где
,где
![]()
Если ΔV=10км/ч – это ложная цель и нужно снять ее с сопровождения. Реализация данного метода будет показана на структурной схеме БРЛС ниже.
Расчет параметров помехопостановщика
Общей задачей применения активной помехи, в нашем случае является сокрытие объекта в некоторой области пространства, уменьшение зоны видимости подавляемой РЛС, уменьшении вероятности правильного обнаружения подавляемой РЛС.
Существует несколько способов реализации такой помехи:
- усиление исходного шумового сигнала;
- формирование активной помехи из самого полезного сигнала.
Остановимся на рассмотрении второго способа.
При постановке активной помехи возможны две ситуации:
- передатчик активных помех расположен непосредственно на прикрываемом объекте (самоприкрытие).
- постановщик активных помех расположен в вынесенной точке пространства.
Остановимся на рассмотрении первой ситуации.
Наиболее перспективной схемой постановщика активных помех, является схема с применением фазированных антенных решёток (ФАР). ФАР позволяет сконцентрировать энергию в узком луче и направить его на подавляемые РЭС, за счёт фазирования удаётся довести мощность излучения до величины:
![]()
Выбранный вариант схемы представлен на Рис.26.
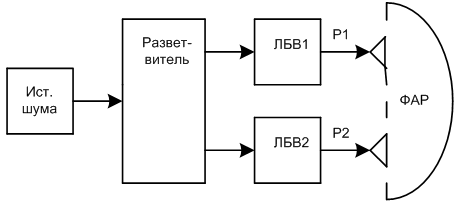
Мощность передатчика активных помех должна соответствовать приблизительно 10% от мощности передатчика подавляемой РЛС. Таким образом мощность передатчика активных помех будет составлять 500 Вт. Коэффициент усиления антенны передатчика активных помех будет равен 100. Необходимо иметь ввиду что частота на которой ставится активная помеха должна соответствовать частоте на которой работает РЛС. Иными словами спектр помехи должен соответствовать полосе пропускания приёмника РЛС, рассогласование этих параметров будет приводить к неэффективности такой помехи.
Защита от активной помехи
Несмотря на общую высокую эффективность применения активной шумовой помехи (АШП), существенный недостаток при использовании состоит в том, что их легко обнаружить. Это ставит в уязвимое положение ПАП, а также позволяет применить различные меры борьбы с помехами:
- работа РЛС в короткий промежуток времени;
- смена несущих частот (если РЛС многочастотная);
- использование сложных сигналов;
- использование длительного когерентного накопления.
Но все эти вышеуказанные методы либо приводят к неудобству работы РЛС, либо к изначальному проектированию РЛС с возможностью таких режимов работы. Одним из перспективнейших методов борьбы с АШП является адаптивных антенных решёток.
Оптимальную обработку сигналов в решётках можно рассматривать как задачу оптимальной фильтрации, основной целью которой является улучшение приёма или обнаружения полезного сигнала, когда наряду с ним присутствуют помехи. При этом полезный сигнал может иметь один или несколько неопределённых параметров (таких как пространственное положение его источника, энергия и начальная фаза сигнала), которые необходимо оценить.
Поскольку любая многоэлементная антенная решётка может использоваться для осуществления пространственной фильтрации или, что то же самое угловой селекции, то первоначальный подход к решению проблемы сводился к получению требуемых ДН с нулями в направлении источников помех с помощью весового суммирования сигналов отдельных элементов решётки.
При более общем подходе к проблеме обнаружения сигнала на форму ДН не накладывается каких-либо ограничений. Структура процессора для обработки сигналов решётки обусловлена выбранным критерием оптимальности и получается в результате математического решения рассматриваемой задачи. При это операция формирования ДН становится частью алгоритма оптимальной обработки сигналов, хотя такая операция и не была задана в самом начале. Полученное устройство обработки (процессор) будет настолько близко к оптимальному, насколько используемые математические модели соответствуют действительным условиям работы системы.
При использовании большинства известных критериев эффективности оптимальные решения (оптимальные весовые векторы) тесно связаны между собой. Наиболее известным оптимальным решением для линейной антенной решётки с числом элементов n является n-мерный вектор комплексных весовых коэффициентов:
![]()
Где R – комплексная корреляционная матрица помех, размерности n*n, S – n-мерный вектор ожидаемого сигнала. Отсчёты смеси сигнала и помехи, соответствующие каждому элементу антенной решётки, в формуле взяты в некоторый момент времени ![]() .
.
Практическая реализация алгоритма связана с решением проблемы априорной неопределённости, которая заключается в отсутствии информации о корреляционной матрице помех R. Одним из методов решения данной проблемы является адаптация, представляющая собой процедуру настройки параметров антенной решётки на основе данных, последовательно извлекаемых из принимаемой смеси сигнала и помех. Важным этапом является выбор алгоритма адаптации, поскольку он непосредственно влияет как на скорость переходного процесса (сходимости), так и на сложность технической реализации системы в целом.
Среди всего многообразия адаптивных алгоритмов наиболее распространёнными являются два класса:
- алгоритмы, основанные на вычислении коэффициентов весового вектора антенной решётки путём непосредственного обращения заранее оцениваемой корреляционной матрицы (метод НОМ);
- градиентные адаптивные алгоритмы, приводящие к устройствам обработки с корреляционными обратными связями (КОС).
Первый класс алгоритмов теоретически обеспечивает самую высокую скорость переходных процессов адаптации, однако требует больших вычислительных затрат при больших размерностях корреляционной матрицы.
Второй класс, несмотря на сравнительную простоту и высокую эффективность в установившемся режиме, имеет ряд недостатков, главным из которых является длительный переходной процесс адаптации, особенно в случае сильно коррелированных помех. Кроме того, системам КОС присуща нестабильность при изменении мощности помехи, а также при наличии мощного сигнала от цели.
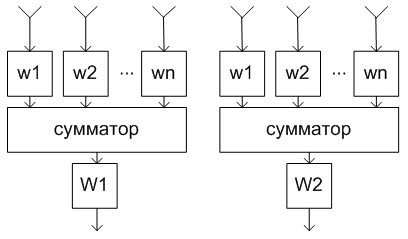
На практике в целях упрощения аппаратурной реализации переходят к частичной адаптации, когда весовой коэффициент ![]() определяется не для каждого элемента фазированной антенной решётки (ФАР), а для двух или нескольких подрешёток, на которые разбивается ФАР. При этом адаптация осуществляется не путём подстройки фазовращателей ФАР, а на видеочастоте в процессоре сигналов. Так в простейшем случае при разбиении линейной ФАР надве подрешётки получается два пространственных канала (Рис.27). При этом техническая реализация адаптивного алгоритма первого класса не представляет больших сложностей.
определяется не для каждого элемента фазированной антенной решётки (ФАР), а для двух или нескольких подрешёток, на которые разбивается ФАР. При этом адаптация осуществляется не путём подстройки фазовращателей ФАР, а на видеочастоте в процессоре сигналов. Так в простейшем случае при разбиении линейной ФАР надве подрешётки получается два пространственных канала (Рис.27). При этом техническая реализация адаптивного алгоритма первого класса не представляет больших сложностей.
Алгоритм НОМ представляет собой выражение ![]() , в котором матрица R заменяется её оценкой максимального правдоподобия (ОМП). Вектор S обеспечивает согласованный приём (накопление) сигнала. Поскольку параметры сигнала (направление прихода) априори неизвестны, стандартный подход к решению задачи накопления сводится к перебору всевозможных значений, это реализуется электрическим сканированием луча ФАР. Электрическое сканирование реализовано непосредственно фазовращателями ФАР
, в котором матрица R заменяется её оценкой максимального правдоподобия (ОМП). Вектор S обеспечивает согласованный приём (накопление) сигнала. Поскольку параметры сигнала (направление прихода) априори неизвестны, стандартный подход к решению задачи накопления сводится к перебору всевозможных значений, это реализуется электрическим сканированием луча ФАР. Электрическое сканирование реализовано непосредственно фазовращателями ФАР ![]() , которые обеспечивают синфазность отсчётов сигнала в обоих каналах, поэтому в формуле принимаем вектор комплексных амплитуд сигнала S={1,..1}
, которые обеспечивают синфазность отсчётов сигнала в обоих каналах, поэтому в формуле принимаем вектор комплексных амплитуд сигнала S={1,..1}![]() (случай полностью известного сигнала). При этом оптимальная обработка сигнала на фоне АШП по заданному алгоритму сводится к вычитанию из отсчётов 1-го канала Y1 отсчётов 2-го Y2, умноженных на оценку комплексного коэффициента корреляции R, и наоборот, из отсчётов 2-го канала – отсчётов 1-го (компенсация помехи) и последующего сложения результатов вычитания (накопление сигнала). Оптимальный весовой вектор будет иметь вид
(случай полностью известного сигнала). При этом оптимальная обработка сигнала на фоне АШП по заданному алгоритму сводится к вычитанию из отсчётов 1-го канала Y1 отсчётов 2-го Y2, умноженных на оценку комплексного коэффициента корреляции R, и наоборот, из отсчётов 2-го канала – отсчётов 1-го (компенсация помехи) и последующего сложения результатов вычитания (накопление сигнала). Оптимальный весовой вектор будет иметь вид ![]() , где * - знак комплексного сопряжения. Устройство, осуществляющее вычитание Z=Y1-Y2R комплексных отсчётов, называется компенсатором помехи. Алгоритм ОМП комплексного коэффициента корреляции R имеет вид:
, где * - знак комплексного сопряжения. Устройство, осуществляющее вычитание Z=Y1-Y2R комплексных отсчётов, называется компенсатором помехи. Алгоритм ОМП комплексного коэффициента корреляции R имеет вид:
![]()
Где Y1,2 – отсчёты на выходе соответственно 1-го и 2-го пространственных каналов, m – число усреднений. Алгоритм ОМП предусматривает усреднение по совокупности независимых отсчётов помехи. Для случая импульсного сигнала с большой скважностью, когда отражённый сигнал находится в одном элементе разрешения по дальности, для усреднения используют отсчёты разных элементов разрешения по дальности. При большом количестве усредняемых отсчётов влиянием одного отсчёта полезного сигнала (сигнал находится в одном элементе разрешения) на оценку коэффициента корреляции помехи можно пренебречь.
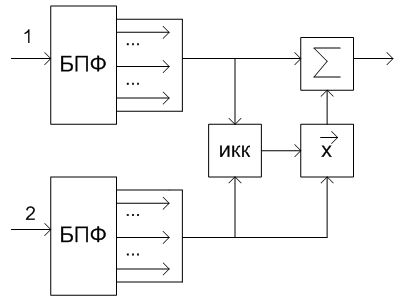
Структурная схема компенсатора АШП для пары пространственных каналов приведена на Рис.28. Кроме блоков БПФ и вычитающего сумматора на схеме показаны измеритель коэффициента корреляции (ИКК) и комплексный перемножитель (![]() ).
).
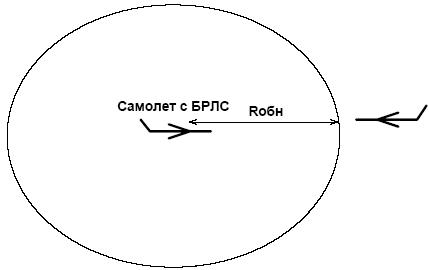
Расчет зон прикрытия помехами
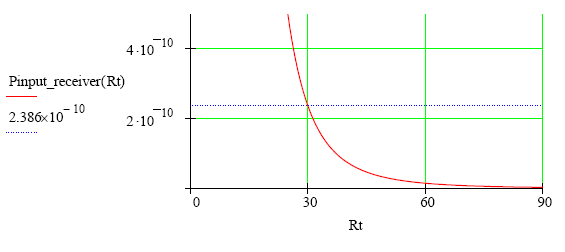
Покажем влияние ЭПР от подстилающей поверхности на дальность действия РЛС рис.29.
![]()
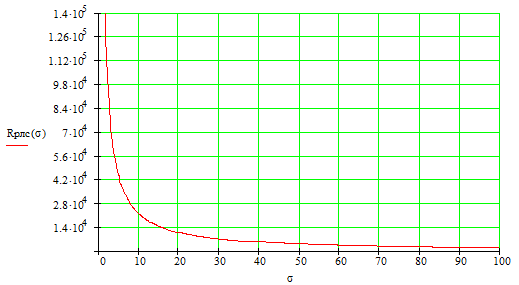
С увеличением ЭПР помехи дальность действия РЛС уменьшается связанно это с большим отражением в сторону РЛС, что может приводить, в свою очередь, к запиранию приемника.
Для более наглядного отображения зон прикрытия активными помехами, приводится Рис.30:
Интерес представляет зависимость дальности действия РЛС от мощности передатчика, в условиях применения активных помех, её можно получить из формулы:
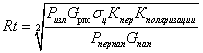
![]() - мощность передатчика РЛС;
- мощность передатчика РЛС;
![]() - коэффициент усиления антенны РЛС;
- коэффициент усиления антенны РЛС;
![]() - ЭПР цели;
- ЭПР цели;
![]() - коэффициент передачи, берётся равным единице;
- коэффициент передачи, берётся равным единице;
![]() - коэффициент поляризации, берётся равным единице;
- коэффициент поляризации, берётся равным единице;
![]() - мощность передатчика ПАП;
- мощность передатчика ПАП;
![]() - коэффициент усиления антенны ПАП.
- коэффициент усиления антенны ПАП.
Так как цель осуществляет самоприкрытие, тои сигнал и помеха приходят по главному лучу.
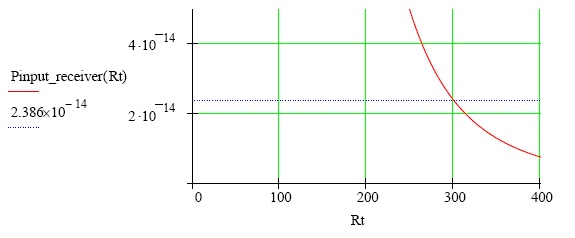
Зависимость максимальной дальности обнаружения от мощности постановщика помех имеет следующий вид:
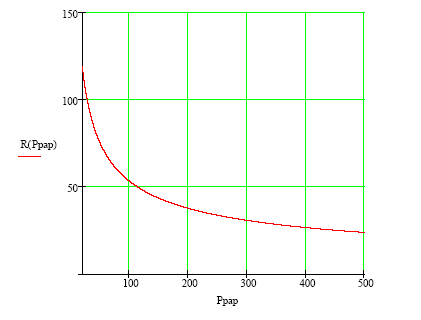
Отсюда видно, что при остальных фиксированных параметрах энергетическая дальность БРЛС уменьшается существенно. В реальности же существует некая минимальная дальность, начиная с которой эффективность помехопостановки падает. Это происходит вследствие того что вместе с увеличением сигнала помехи на входе БРЛС, происходит увеличение и сигнала от цели, так как помехопостановщик и цель совмещены.
Анализ эффективности применения комплекса помех и средств помехозащиты
Эффективность подавления помехи компенсатором характеризуется коэффициентом подавления Kп=Рпвх/Рпвых. Вычисляя мощность помехи на выходе компенсатора, нетрудно показать, что коэффициент подавления в установившемся режиме равен:
Кп=1/(1-![]() )
)
Где ![]() - модуль коэффициента корреляции R.
- модуль коэффициента корреляции R.
В нашей ситуации, ситуации самоприкрытия, эффективность помехи тем выше, чем больше расстояние от БРЛС до цели, и падает по мере его уменьшения.
Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
Такого рода оценка позволяет сделать выводы о современных возможностях электроники и техники в целом, достичь на данном этапе желаемого результата. Наличие реальных ограничений физических возможностей летчика делает настоятельно необходимым разработку беспилотных боевых самолетов. Следует отметить, что в конечном счете использование беспилотных боевых самолетов имеет и явный экономический аспект, направленный на удешевление боевых действий. Положительный опыт применения беспилотного боевого самолета США RQ-1A «Предатор» (Хищник) при уничтожении группировок талибов в горах Афганистана показывает, что эта задача уже переведена в практическую плоскость.
Необходимо, однако, подчеркнуть, что использование беспилотных боевых самолетов, особенно в воздушном бою, потребует разработки новых тактических приемов их использования с существенно более высоким уровнем информационного обеспечения, в рамках которого инвариантные к метеоусловиям БРЛС будут играть все возрастающую роль.
Непрерывность поступления высокоточной информации является одним условием эффективного решения боевых задач. В связи с этим одним из важнейших свойств БРЛС является ее способность работать в любой (сложной) помеховой обстановке. Эта способность должна обеспечиваться:
· разработкой комплексных систем анализа сигнально-помеховой обстановки;
· созданием эффективных средств защиты от сигналоподобных и многоточечных помех;
· использованием скрытных, в том числе и пассивных режимов работы;
· комплексированием датчиков различной физической природы;
· использованием многопозиционных систем и групповых действий;
· разработкой эффективных средств защиты;
использованием своих средств РЭБ в интересах помехозащиты.
Что же касается помехопостановки, то здесь требуется разработка новых алгоритмов и более быстродействующих вычислительных устройств. Так же хорошо бы разработать алгоритмы, позволяющие отслеживать изменение ситуации в реальном времени. Таким образом, на устройства помехопостановки накладываются порой более жесткие требования по быстродействию, нежели к БРЛС, для которой это условие играет не малую роль. Подводя итог, можно сказать, что для улучшения возможностей противоборствующих сторон требуется освоение новых технологий и материалов, поиск эффективных математических решений.
Выбор и технико-экономическое обоснование технологической базы для реализации проекта
В связи с тем, что отечественная промышленность далеко отстает от зарубежной, а ряд радиоэлементов и деталей вообще не производится, всем разработчикам военной техники приходится использовать зарубежную базу. Такой подход сказывается на стоимости разработки, а самое главное трудно сказать, несмотря на всевозможные исследования и проверки, снабжена ли та или иная микросхема специальным чипом, который в случае необходимости приведет выходу из строя устройства. Для реализации проекта потребуется использование импортных микросхем (АЦП, ЦАП и др. вычислительные устройства).
Экономическое совершенство БРЛС оценивается по критерию стоимости ее жизненного цикла (СЖЦ), который включает в себя: стоимость разработки, закупочную стоимость, стоимость эксплуатации, стоимость модернизации и снятия с эксплуатации. Многолетние статистические данные показывают, что затраты на эксплуатацию составляют более 50% СЖЦ, поэтому при снижении стоимости эксплуатации может быть получена значительная суммарная экономия. В свою очередь, стоимость технической эксплуатации БРЛС определяется:
· стоимостью разработки и применения системы технической эксплуатации (СТЭ);
· методами и техническими средствами контроля, диагностирования и управления техническим состоянием БРЛС в воздухе для обеспечения ее отказоустойчивости в течение времени применения по назначению и на земле, при техническом обслуживании и ремонте;
· надежностью БРЛС, т.е. ее безотказностью, ремонтопригодностью, долговечностью и сохраняемостью;
· организационно-штатной структурой инженерно-технического состава (ИТС) и стоимостью его обучения.
Применяемая в настоящее время планово-предупредительная СТЭ бортового оборудования по существу является СТЭ по ресурсу. Она включает в себя мощные наземные средства контроля и диагностирования, с помощью которых ИТС проводит большое количество различных (затратных) профилактических работ (подготовку к полетам, периодические, регламентные работы и т.п.). Результаты контроля технического состояния при применении по назначению в воздухе не используются и расшифровываются лишь по необходимости при техническом обслуживании на земле. Все это приводит к снижению эффективности применения БРЛС, росту ошибок, допускаемых летным составом, а, главное, к непроизводительному расходу ресурса бортового оборудования на земле, который достигает 30...40%.
Основные исходные данные для создания перспективной экономичной СТЭ БРЛС - набор рабочих режимов бортовых систем, наличие в них информационной, функциональной и структурной избыточностей, а также показатели безотказности программного обеспечения и аппаратуры.
В авиационных бортовых системах в качестве сетевой магистрали давно служит шина, выполненная по стандарту MIL – STD – 1553B. Это детерминированная надежная шина передачи данных со скоростью 1 Мбит/с. Она используется для подключения датчиков и контроллеров реального времени к вычислительным модулям бортовой вычислительной системы. Ее массовость объясняется следующими факторами:
· линейной архитектурой локальных сетей;
· возможностями резервирования;
· поддержкой как простых, так и интеллектуальных узлов;
· высокой электрической защищенностью:
· доступностью компонентов;
· гарантированным детерминизмом в условиях реального времени.
Несмотря на все привлекательные стороны шины MIL – STD – 1553B, которые способствовали ее широкой популярности, применение этой шины в более скоростных по обмену информацией военных системах сдерживается довольно низкой скоростью последовательной передачи данных - всего 1 Мбит/с.
На замену MIL – STD – 1553B претендуют такие известные стандарты высокоско-ростной связи, как Fiber Distributed Data Interface (FDDI), Fiber Channel, ATM и др.
Составление структурной схемы устройства и описание ее работы
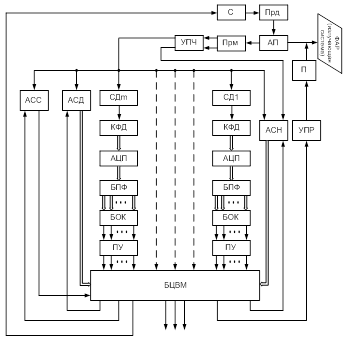
Структурная схема импульсно-доплеровской РЛС
Структурная схема бортовой РЛС приведена на рис. 35 (так же имеется в графическом материале). На структурной схеме показано взаимодействие основных узлов импульсно-доплеровской РЛС. Режимы работы синхронизатора (С) задаются бортовой ЦВМ. Приемник с усилителем промежуточной частоты (УПЧ) имеет как минимум два идентичных канала: дальномерный и угломерный. С угломерного канала поступает информация об угловых координатах цели в режиме обзора и автосопровождения. Информация с дальномерного канала служит для обнаружения, измерения параметров цели в различных режимах.
Основная обработка производится в согласованном фильтре, состоящем из m временных каналов, каждый из m каналов состоит из селектора дальности (СД), квадратурных фазовых детекторов (КФД), АЦП, БПФ, блока объединения квадратур (БОК) и порогового устройства (ПУ). Широкой линией показана обработка в двух квадратурных каналах. Выходы ПУ, число которых определяется числом отраженных импульсов в пачке n, подключены к БЦВМ, где в соответствии с заложенными алгоритмами решаются задачи обнаружения, измерения параметров цели.
Системы автосопровождения по скорости (АСС), дальности (АСД), направлению (АСН) решают задачу сопровождения выбранной цели. Устройство управления (УПР) и привод (П) по информации с БЦВМ изменяют положение антенного устройства.
Перевод системы на автоматическое сопровождение цели осуществляется после режима обзора и захвата цели на автосопровождение.
Сканирование луча антенны можно осуществлять по строчному методу двумя циклами. Если четные и нечетные строки проходить лучом в противоположных направлениях, то частоту повторения от строки к строке можно менять с высокой на среднюю и наоборот. Циклы отличаются порядком изменения частоты повторения при переходе с четных на нечетные строки, так что за два цикла режимы ВЧП и СЧП используются для просмотра всего пространства, обеспечивая всеракурсное обнаружение целей.
Заключение
В результате работы была проделана очень интересная работа, во-первых, были получены навыки построения БРЛС, во-вторых, ознакомились с основными проблема при их (БРЛС) построении и, в-третьих (наверное, самое главное), задача рассматривалась с разного ракурса. Т.е. первоначально делалось все необходимое для обеспечения нормальной работы БРЛС, затем, со стороны постановщика помехи, все (с учетом носителя) для срыва этой работы.
Анализ тактических, экономических и технологических факторов, позволяет сформулировать целесообразные проектные решения. В концептуальном плане эти установки направлены на:
· повышение боевой эффективности;
· повышение экономичности разработки, эксплуатации и боевого применения БРЛС;
· расширения ее информационных возможностей, в том числе и за счет использования новых информационных технологий.
Исходя из всего выше сказанного, можно сделать вывод о том, что сама задача проектирования БРЛС является сложной и многогранной (включает много задач и еще больше решений, среди которых следует выбрать одно), т.о. рассмотреть ее в полной мере в курсовой работе не представляется возможным. В связи с этим, были лишь отмечены некоторые проблемы и решения.
Список использованных источников
1. Гоноровский И. С., Радиотехнические цепи и сигналы, 2 изд., М., 1971.
2. Гуткин Л. С., Теория оптимальных методов радиоприёма при флуктуационных помехах, М., 1972.
3. Канащенков А.И., Меркулов В.И., Самарин О.Ф., Облик перспективных бортовых радиолокационных систем. Возможности и ограничения, М.: ИПРЖР, 2002.
4. Финкельштейн М. И., Основы радиолокации, 2 изд., М.: Радио и связь, 1983.
5. Горкин В.Н., Расчет системных параметров РЛС: методические указания к лабораторной работе, Рязань: РГРТА, 2005.
6. Федоров В.А., Методы и устройства обработки сигналов в импульсно-доплеровских радиолокационных станциях, Рязань: РГРТА, 2006.
7. Перунов Ю.М., Фомичев К.И., Юдин Л.М., Радиоэлектронное подавление информационных каналов систем управления оружием, М: Радиотехника, 2003.
Похожие работы


... защиты от УП является введение в РЛС режима сопровождения слабого сигнала, при котором при воздействии ответной помехи (первый этап в постановке УП) продолжается сопровождение менее мощного сигнала от цели. 5. Анализ эффективности применения комплекса помех и средств помехозащиты При воздействии только пассивных помех с рассчитанными в пункте 4.1 параметрами отношение сигнал/помеха на входе ...

... . Ко второму типу относятся РЛС управления объектами по данным радиолокационных измерений, такие как РЛС управления воздушным движением. 2). Анализ задачи и ее формализация Основываясь на требованиях технического задания нам необходимо создать средства постановки помех и помехозащиты для радиолокационной станции управления воздушным движением работающей по трем координатам: дальности, ...
... целей, то вероятность правильного обнаружения снижается в 1.5 раза. 7. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон. Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств ...

... ) целей вплоть до их типа с ранжированием по степени важности (опасности); o выдача команд целеуказания средствам поражения и формирование для них команд радиокоррекции; o точное определение расположения препятствий на пути следования вертолета. Расчет параметров РЛС радиоэлектронный защита помеха Расчет будем производить с помощью программы "Стрела". В окне параметров системы на пяти ...
0 комментариев