АСУ называется человеко-машинная система, обеспечивающая автоматизированный сбор и переработку информации, необходимой для оптимального управления в различных сферах человеческой деятельности.
Из этого определения следуют характерные признаки АСУ:
- в состав АСУ входит ЭВМ;
- в состав АСУ входят люди в качестве диспетчеров и операторов, которые осуществляют контроль и управление соответствующим объектом;
- переработка информации осуществляется на ЭВМ;
- как правило сбор информации для её переработки на ЭВМ осуществляется с помощью тех. устройств без участия человека;
- в результате переработки информации на ЭВМ должно формироваться оптимальное управление.
Система – это множество элементов, каждый из которых прямо или косвенно связан с каждым другим элементом а 2 любых подмножества этого множества не могут быть независимыми.
Любая система функционирует в некоторой окружающей (внешней) среде. Любая среда воздействует на систему и направлена на уничтожение системы. Любая система имеет защитные механизмы (необходимые для её существования). Защитные механизмы называются регуляторами.
В естественных системах (чел.) регуляторы присутствуют всегда. Для искусственных систем надо разрабатывать регуляторы.
Автоматизированная подразумевает участие человека (не путать с автоматической).
Управление – это:
1) навязывание обусловленного поведения;
2) целенаправленное воздействие одной системы на вторую с целью установить желаемое состояние системы, на которую воздействуют.
Состояние системы – это совокупность существенных, наиболее важных для системы характеристик, которыми она обладает в данный момент времени.Состояние характеризуется численными характеристиками. Их набор называется переменными состояния системы и обозначается ![]() .
.
 .
.
В теории управления система на которою воздействуют называется объектом управления (ОУ). Система которая формирует управление – управляющая система (устройство управления).
Совокупность ОУ и УС называется системой управления (СУ). УС + ОУ = СУ.
Оптимальное управление – это такое управление при котором обеспечивается max или min некоторого показателя качества (F) режима работы ОУ.
АСУ относятся, как правило, к большим системам (системы с большим кол-вом элементов, ОУ). В АСУ имеются как автоматизированное так автоматическое управление.
Классификация АСУ:
Всё множество АСУ можно разделить на 2 большие группы:
1) автом. системы управления производством (предприятием) АСУ П.
2) АСУ ТП (технологическим процессом).
АСУ П осн. х-ки, призанки:
1) Объектом управления есть организованные совокупности людей, возможно оснащённых техникой. Управление армией,…
2) Сбор информации в таких системах осуществляется в основномлюдьми с помщью какой-то техники;
3) реализация управляющих воздействий осуществляется также людьми.
АСУ ТП (характерные особенности):
1) объектом управления есть некоторый технологический процесс или некоторое технологическое оборудование;
2) сбор информации осуществляется тех. устройствами автоматически;
3) реализация управлений может осуществляться через человека так и автоматически.
АСУ в энергосистемах имеют название АС диспетчерского управления (АСДУ).
Составные части АСУ ТП.1) Функциональна часть АСУ ТП.
Представляет совокупность всех функций, которые выполняет данная система. Эти функции ещё называют законами АСУ и они включают в себя перечень всех функций управления, формулировку каждой функции, цель, мат. аппарат и алгоритм каждой функции.
2) Техническая (комплекс технических средств АСУ ТП).
Это совокупность всех компьютерных средств, всех устройств, обеспечивающих сбор информации, измерение, передачу информации и реализацию управляющих сигналов.
3) Программная (математическая – в л-ре может встретится).
Это совокупность системных и функциональных программ (р-щие функции АСУ).
4) Информационная.
Совокупность всей информации, циркулирующей в системе, и программ, обеспечивающих хранение, обновление и коррекцию информации, а также доступ к ней.
Тема 2. Функциональная часть АСУ ТП. Общая характеристикаИзмерение всех режимных переменных состояния. Преобраз. – преобр. измеренных сигналов в форму, удобную для обработки на компьютере (цифровую и кодированную).
ВС – вычислительная система (не 1 комп.). В результате обработки данных получают:
1) совокупность обработанной, измеренной информации (без помех, ошибок);
2) управляющие сигналы;
3) расчётные режимные величины.
Обработка данных ведётся по заранее разработанным алгоритмам и программам.
4) хранение с обновлением, коррекцией, удалением устаревшей информации.
I – 1-ый автоматический контур АСУ (без людей). Есть АСУ только с первым контуром.
II – автоматизированное управление.
Тема 3. Техническая часть АСУ ТПДатчики – технические устройства, которые обеспечивают измерение информации (но это не измерительные приборы (стрелочные амперметры, вольтметры и т.д.)).
УВИ – устройства ввода информации (преобразование в код для ЭВМ);
УВК – управляющий вычислительный комплекс (комплекс компьютерной техники);
АРМО – автоматизированное рабочее место оператора. Есть АРМО турбин, АРМО СГ;
УВУС – устройства вывода управляющих сигналов (з кода компьютера в аналоговый сигналы).
ИОто – исполнительные органы технологических объектов (эл. маг. выключателя, например);
САУ – системы автоматического управления. Если установлены на отдельных, конкретных технологических объектах то локальные САУ (ЛСАУ) (регулирование возб. СГ).
Датчики – это устройства, обеспечивающие измерение режимных параметров и преобразование этих измерений в эл. сигнал тока или напряжения, пропорциональный измеряемой величине (ИТТ, ИТН). Датчики делятся на 2 группы: - аналоговые; - дискретные.
Аналоговые – датчики, на выходе которых есть непрерывный во времени сигнал (аналоговый сигнал).
Дискретные – датчики на выходе которых имеется дискретный по уровню или во времени сигнал. Дискретный по уровню сигнал – это сигнал в котором текущее значение непрерывного во времени сигнала заменяется конечным числом уровней этого сигнала. От 0 до ![]() непрерывный сигнал заменяется на
непрерывный сигнал заменяется на ![]() . На участке
. На участке ![]() непрерывный сигнал заменяется уровнем
непрерывный сигнал заменяется уровнем ![]() .
. ![]() →
→ ![]() ;
; ![]() →
→ ![]() ;
; ![]() →
→ ![]() и т.д.
и т.д.
Обычно эти уровни на одинаковом расстоянии ![]() . Принцип измерения: пока сигнал не изменится на
. Принцип измерения: пока сигнал не изменится на ![]() датчик фиксирует предыдущее значение уровня. Величина
датчик фиксирует предыдущее значение уровня. Величина ![]() зависит от конструкции датчика (схемы датчика).
зависит от конструкции датчика (схемы датчика). ![]() определяет точность измерений.
определяет точность измерений. ![]() также зависит от погрешности измерения. Разновидность: бинарный датчик (на его выходе сигнал двух уровней).
также зависит от погрешности измерения. Разновидность: бинарный датчик (на его выходе сигнал двух уровней).
Датчик типа "да", "нет". Определяет состояние коммутационной аппаратуры. В качестве бинарного датчика используются контакты различных контрольных реле.
Дискретный во времени – датчик, который текущее значение измеряемой величины заменяет конечным числом мгновенных значений, фиксирующих измерения через равны промежутки времени.
![]() . Есть ещё подвид дискретного во времени датчика, который широко применяется в АСУ эл. эн. Это число-ипульсные датчики. Они на выходе генерируют различные количества импульсных сигналов в зависимости от измеряемой величины.
. Есть ещё подвид дискретного во времени датчика, который широко применяется в АСУ эл. эн. Это число-ипульсные датчики. Они на выходе генерируют различные количества импульсных сигналов в зависимости от измеряемой величины.
Измерением является кол-во импульсов N за промежуток времени ![]() . N в пересчёте даёт значение измеряемой величины. Таким датчиком снабжаются все счётчики эл. эн., которые используются в АСУ. Для таких датчиков установлен весовой коэффициент (цена импульса). По ним пересчёт. Например,
. N в пересчёте даёт значение измеряемой величины. Таким датчиком снабжаются все счётчики эл. эн., которые используются в АСУ. Для таких датчиков установлен весовой коэффициент (цена импульса). По ним пересчёт. Например, ![]() .
.
Они обеспечивают съём сигналов датчиков, передачу этих сигналов на расстояние и преобразование в машинные коды ЭВМ.
Обычно к первому УВвИ подключается 8 – 32 датчиков. Канал связи с ЭВМ может быть в виде двухпроводной линии либо многопроводной (многоразовой) линии. В первом случае сигналы измерения датчиков предаются последовательно (сначала с ![]() , затем с
, затем с ![]() ,…). Измеренная величина каждого датчика в виде машинного кода также передаётся последовательно во времени побитно. машинные коды измерений формируемые УВвИ имеют 8 – 32 разряда
,…). Измеренная величина каждого датчика в виде машинного кода также передаётся последовательно во времени побитно. машинные коды измерений формируемые УВвИ имеют 8 – 32 разряда ![]() .
.
В случае многоразрядного канала связи сигналы передаются параллельно, каждый разряд по своей.
Самые распространённые аналоговые датчики. Выход этих датчиков в УВвИ преобразуется в цифровой сигнал. УВвИ имеет при этом АЦП. УВвИ иногда называют просто АЦП. Если величина изменяется от 0 до 10 В 4 разрядный АЦП ![]() . "Цена деления"
. "Цена деления" ![]() (В). УВвИ обязательно содержит фильтры для подавления измеренных шумов.
(В). УВвИ обязательно содержит фильтры для подавления измеренных шумов.
Они обеспечивают преобразование управляющих сигналов, расчитаных на управляющем вычислительном комплексе, из машинных кодов в аналоговые или дискретные сигналы тока или напряжения. УВУС содержит ЦАП.
Исполнительные органы технологического оборудования.Это различные приводы, задвижки, контакты, реле. Это те органы которые непосредственно обеспечивают реализацию сигнала управления, отходящего от ЭВМ.
ЛСАУ.Это системы авт. упр.установленные непосредственно на эл. ст. АРВ СГ, главный регулятор котла, регулятор напряжения трансформатора с РПН, регулятор частоты вращения турбины.
УВК.Обеспечивает обработку данных всей АСУ и функционирование всех технических средств АСУ.
Структура современного УВК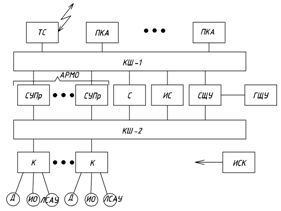
Это примерная структура УВК, которая принимается в современных АСУ ТП эл. ст. Эта структура двухуровневая. Каждый уровень определяется наличием коммуникационной шины КШ на которых реализуется локальная вычислительная сеть. КШ ещё называют информационными шинами. К КШ подключаются различные вычислительные устройства и КШ обеспечивает обмен информацией и управление между отдельными вычислительными устройствами. Есть и одноуровневые системы (1 КШ) – их сейчас не строят. Есть 3-уровневые (хим. промышленность). На каждой шине своя локальная вычислительная сеть, но меж ними есть протоколы обмена.
ТС – терминал связи (для обмена информацией данным ВК и внешними (другими) ВК, например связь АСУ ТП эл. ст. с АСДУ (автоматизированная система диспетчерского управления) эн. системы); ![]() – канал связи.
– канал связи.
Канал связи – выделенный телефонный канал (зарубежом – радиоканалы). ПКА – персональные компьютеры администрации.
СУПр – станции управления персоналом. Реализуются также на ПК, но имеет связь с КШ1 и КШ2. Назначение СУПр: управление частями технологического процесса на эл. ст. Например, станция управления турбинами, станция управления котлами, станция управления эл. частью станции. Разбивка на эл-ты разна (в завис. от мощности ст.).
АРМО – автоматизированные рабочие места операторов.
Осн. функции СУПр:
1) отображение информации об оборудовании на экране монитора в виде схем, диаграмм с указанием измерений текущих режимных параметров;
2) возможность вмешательства операторов в ход технологического процесса через контроллеры (вмешательство только в свою часть (котёл, СГ));
3) расчёт и анализ режимных ситуаций (нормальных и ав.) с последующим изображении на мониторе. Например, расчёт ТКЗ в точке;
4) построение графиков режимных параметров за определенный период времени.
С – сервер. Обеспечивает обработку данных в данном УВК, обмен информации меж различными устройствами, подключение к КШ и обмен информации.
ИС – инженерная станция (тоже ПК (перс. комп.)).
Настройка ВК:
· прикладное программирование;
· поиск ошибки в системе;
· защита данных;
· тестирование устройств ВК.
ГЩУ главный щит управления эл. ст. (Для удобства оператив. обслуживания приборы и аппараты с-мы управления сосред-ют на щитах управления (ЩУ). ЩУ представляют собой уст-во что содерж. тех. средства (приборы, аппараты, ключи, сигнал. лампочки…) предназнач. для управления работой отдельных агрегатов, группы агрегатов, участка или всей эл. установки (управ. ген-ми, т-ми, КЛ, ВЛ, междушинными связями). Команды на операции управления или рег-ния подаются вручную или автоматикой. На ГЩУ находится начал. см. ст. (ДИС). На ГЩУ устанавливают приборы контроля за осн. тепловыми показателями ст. и предусматривается 2-сторон. связь начальника смены с оперативным персоналом и с диспетчером системы.).
СЩУ – сервер щита управления (обеспечивает вывод информации на ЩУ).
К – контроллеры – программируемые микропроцессорные устройства, выполняющие функции устройств ввода информации, устройств вывода управляющих сигналов и функции ЛСАУ (локальных систем управления).
Д – датчки.
ИСК – инженерная станция контроллеров – ноутбук для настройки и программирования контроллеров.
Информационная и программная часть АСУ ТП.АСУ разбиваются на:
· функциональную часть;
· техническую часть
· информационную часть;
· программную часть.
Информационная часть АСУ ТП представляет собой упорядоченную совокупность всей информации, циркулирующей в АСУ а также способы кодирования этой информации, хранения, доступа к ней и представления этой информации опреаторам.
Упорядочивают информацию в след. больших группах:
1) оперативная информация;
2) нормативно-справочная информация.
1) Получается в рез-те измерения режимных параметров с помощью Д. Способы упорядочивания различают: по признаку принадлежности к тому или иному оборудованию (параметры котла, СГ…).
2) Это паспортные данные на оборудование, справочные данные и нормативные значения режимных параметров (ном. уровни напряжения, ном. частота).
1) и 2) вместе называют входной информацией.
Результаты расчётов управляющих сигналов или результаты расчётов режимных параметров – выходная информация. Обработка всей информации, циркулирующей в АСУ, основывается на так называемых компьютерных банках данных.
Структура банка данных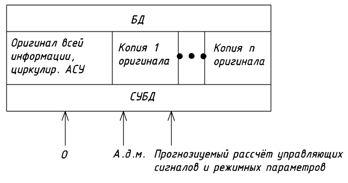
СУБД – система управления БД – совокупность программ. Позволяет обратится к БД со стороны операторов (О), администрации (Адм.) со стороны програм. расчёта управляющих сигналов и режимных параметров.
Программное обеспечение делят на 2 части:
1) общее п.о.;
2) специальное п.о.;
К общему п.о. относят:
1) ОС (представляет собой набор программ, предназначенных для управления компьютером, хранения информации и организации работы всех подключенных к нему устройств);
2) драйверы устройств ввода-вывода (программы которые обеспечивают ввод и вывод информации меж различными устройствами);
3) трансляторы и компиляторы;
4) программы самодиагностики (тестируют работу всего оборудования);
5) стандартные библиотеки программ;
6) программы управления банками данных.
Общее п.о,. как правило, оставляется изготовителем УВК.
Спец. п.о. – совокупность прикладных программ реализующих функции АСУ относительно конкретных технологических объектов.
Всё п.о. можно представить в виде оболочек вложенных друг в друга:
1) ОС (UNIX, MS DOS);
2) Служебные программы (все общие п.о., кроме ОС и программ управления БД-ных);
3) Комплекс программ управления БД;
4) Все прикладные пограммы.
2. Основы построения АСУ ТП в эл. энергетике Структура управления эл. энергетикой страныОсновой эл. энергетики Украины есть объединенная энергетическая система Украины, которая осуществляет технологический процесс производства эл. энергии, транспорта и распределения.
Энергетическое предприятие "Энергорынок". Киевэнерго содержит генерирующие мощности. Основной аспект управления – оперативное управление режимами работы (оперативное – текущее). Основная задача – надёжность снабжения.
Оперативное управление осуществляется диспетчерскими центрами управления. Эти центры есть в НЭК "УЭ" и в восьми региональных энергосистемах системах.
Структура диспетчерского управления в энергетике страны.ЦДП – центральный диспетчерский пункт;
РДЦ – региональные диспетчерские центры эл. эн. систем (8 центров);
ДПУ ОЭ – диспетчерские пункты управления обл. энерго;
ПУ эл. ст. – пункты управления эл. ст.;
ПУ п/ст. 220 – 750 кВ -- пункты управления подстанций сети 220 – 750 кВ;
ДПУ -- диспетчерские пункты управления районов эл. сетей;
РЭС – 10 – 0.4 кВ – сети.
Главные задачи диспетчерского управления в нормальных режимах эн. системы:
1) обеспечение баланса производства и потребления эл. энергии в целом по объединённой эн. системе страны и по отдельным регионам;
2) обеспечение надёжного и качественного эл. снабжения.
Тема. Краткая характеристика обеспечения баланса производства и потребления эл. энергии.Потребление эл. энергии в энергосистемах изменяется постоянно течении минут… По этому производство эл. эн. должно приспосабливаться к этим изменениям к этим изменениям, а это требует следующего:
1) надо планировать строительство новых энергоблоков, эл. станций, эл. сетей на несколько лет вперёд (обычно на 5 лет). Для планирования надо прогнозировать графики потребления на 10 – 15 лет;
2) надо распределять нагрузку меж различными эл. станциями для различных периодов времени: год, неделя, день. Цель распределения нагрузки – ↓ общих затрат на производство эл. энергии;
3) разработка и применение методов и средств управления, которые будут противостоять случайным отклонениям производства и потребления эл. энергии. Эти отклонения связаны с ав. ситуациями. Что б противостоять случайным отклонениям должен быть резерв. Этот резерв мобильный: манёвренные ГЭС, ГТУ, ГАЭС.
Поддержание качества поставки эл. энергии.Под надёжностью эл. снабжения понимается бесперебойность работы. Поддержание баланса имеет смысл если всем потребителям поставляется эл. эн. необходимого качества. Качество эл. эн. характеризуется 2-мя основными параметрами: f и U.
Частота переменного тока – общее системный параметр, значение которого одинаковы во всех точках энергосистемы. Согласно стандартам  в уст. режиме. Отклонение частоты – нарушение баланса мощности. Осн. причины нарушения баланса:
в уст. режиме. Отклонение частоты – нарушение баланса мощности. Осн. причины нарушения баланса:
1) отклонение реальной нагрузки от запланрованной;
2) отсутствие (недостаток) резерва по генерируемой мощности.
Для поддержания баланса надо регулировать мощность эл. станций в соответствии с изменением нагрузки. ![]() ;
; ![]() суммарные потери мощности. В случае отсутствия регулирующего диапазона на эл. станциях приходится отключать нагрузку в эл. эн. системах. При значительных отклонениях баланса (ав. откл. СГ, ЛЭП) могут возникнуть нарушения устойчивой параллельной работы СГ эл. ст. (вплоть до выпадения из синхронизма).
суммарные потери мощности. В случае отсутствия регулирующего диапазона на эл. станциях приходится отключать нагрузку в эл. эн. системах. При значительных отклонениях баланса (ав. откл. СГ, ЛЭП) могут возникнуть нарушения устойчивой параллельной работы СГ эл. ст. (вплоть до выпадения из синхронизма).
Второй параметр, характеризующий качество эл. эн., – напряжение. Напряжение различно в различных точках системы. Надо обеспечить поддержание напряжения на зажимах эл. приёмников на уровнях номинальных значений при нормированных, допустимых отклонениях. Для большинства эл. приёмников: ![]() , для эл. двигателей
, для эл. двигателей  (более широкий диапазон).
(более широкий диапазон).
ЦК – централизованная координация;
РС – распределительная сеть;
ЭП – эл. приёмники;
ЛСАУН – локальные системы автоматического управления напряжением;
ЦП – центры питания:
- Трансформаторы с РПН снабжены автоматическим управлением;
- СК – синхронны компенсаторы (с АРВ СК);
- реакторы;
- КБ (конденсаторные батареи)
В двигателях 6 кВ есть системы автоматического регулирования возбуждения (на газоперекачивающих станциях). Работу ЛСАУН-ием надо постоянно корректировать поскольку их функционирование не зависит друг от друга, а участки эл. сети которыми они управляют взаимосвязаны и изменение режимных параметров на одном участке не сказывается на изменение на втором участке. Надо ЦК (централизованная координация). ![]() ,
, ![]() .
.
Управление мгновенным равновесием энергосистемы. согласно этому временному уровню мощность генерирующего оборудования должна точно следовать и мгновенно реагировать на изменение нагрузки. Такую задачу обеспечивает т.н. первичное регулирование скорости вращения генераторов. Первичное регулирование обеспечивается ЛСАУ, которые устанавливаются на турбинах эл. станций и называются автом. регуляторами частоты вращения турбин АРЧВ (АРС – автом. регуляторы скорости). Кроме первичного на этом временном уровне используется вторичное регулирование, которое обеспечивает изменение мощности генераторов. Первичное и вторичное регулирования должны быть быстродействующими и поэтому реализуются полностью АСУ. Устанав. эти системы на эн. блоках эл. станций.
2. Уровень нескольких минут.На этом уровне управление состоит в нахождении наиболее экономичного распределения нагрузок меж работающими энергоблоками при чёте потерь в эл. сети.
Суточный график нагрузки. Распределение нагрузки по графику.
Эта задача ещё называется третичным регулированием. Решается с помощью многовариантных расчётов на ЭВМ. Ещё наз-ся оптимизация режима работы эл. станций и эн. систем.
3. Уровень суток или недели.Задача состоит в использовании имеющихся эн. блоков тепловых эл. станций таким образом что бы ↓ число пусков и остановов эн. блоков.
4. Уровень года или нескольких лет.Задача состоит в планировании остановов эн. блоков ТЭС на несколько недель для проведения ежегодных ремонтных работ.
5. Уровень нескольких лет.Основная задача планирование строительства новых энергоблоков, ст., п/ст., ЛЭП и поставок оборудования.
3, 4, 5 уровни не относятся к оперативно-диспетчерскому управлению. Это управление в плане планирования (мы не рассматриваем).
Структура технологического управления в электроэнергетике.Технологическое управление – это оперативное управление производством, передачей и распределением эл. энергии. Оперативное управление реализуется диспетчерскими службами. Сейчас все диспетчерские службы оснащены автоматизированными системами управления технологическим процессом в электроэнергетике. Кроме того в область действия и диспетчерских служб и АСУ ТП входят ЛСАУ, установленные на электроэнергетических объектах.
Есть 3 основных группы задач, которые возлагаются на диспетчерские службы АСУ ТП (а значит и на ЛСАУ):
1) обеспечение постоянного необходимого качества питания всех потребителей эл. эн. в любой точке энергосистемы, что требует постоянного оперативного управления частотой, напряжением и мощностью;
2) Осуществление оптимального использования оборудования эл. станций, эл. сетей;
3) Осуществление мер оп ликвидации последствий аварий и восстановления нормальной работы эн. систем, а также осуществление мер по предотвращению аварий.
Структурная схема.
ЭЭС – электроэнергетические системы (8 шт.);
ПЭС – предприятия эл. сетей 35 – 220 кВ (сейчас обл. энерго);
ЭБ – энергоблоки (300 МВт и ↑ → АСУ ТП);
РЭС – районы эл. сетей; Д – датчик; ИО – исполнительные органы; ЛСАУ.
ЦСАУЧМ – централизованная САУ частотой и мощностью;
ЦСАУН -- централизованная САУ напряжением (управл. U и Q)
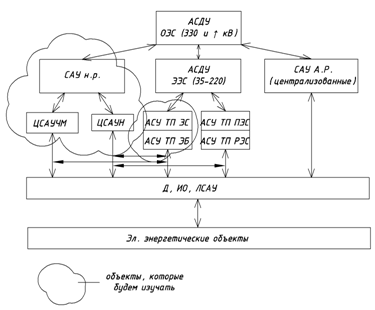
В состав автоматизированного технологического управления эл. эн. системы кроме автоматизированных систем управления входят и автоматические системы управления. Есть 2 группы таких систем: САУ нормальным и САУ аварийным режимами (Н.Р. и А.Р,). Устойчивость параллельной работы СГ энергосистемы → САУ А.Р.
Основные сведения о САУ Н.Р. (нормальным режимом).ЦСАУЧМ – предназначена для регулирования частоты в эл. эн. системе на заданном уровне путём поддержания баланса активной мощности в системе. Эта централизованная система регулирования частоты только за счёт изменения генерирующей мощности.
![]()
Состоит эта система из центральной части и нескольких станционных частей.
На Украине в составе АСУ ОЭС имеется программно-вычислительный комплекс CSADA в состав которого входит ЦСАУЧМ.
На Украине в качестве ЧРЭС используется 4 ГЭС (Днестровская, Днепровская, Кременчугская, Днепродзерджинская) и 1 ТЭС (Змеевская (Донбас)). Для качественного регулирования частоты и мощности к регулированию должны привлекаться практически все ТЭС. У нас не привлекаются из-за изношенности оборудования и отсутствия развитой системы управления (нет каналов связи, денег).
ЦСАУН – предназначена для поддержания напряжений в контролируемых узлах эл. сети 110 и ↑ кВ на заданном уровне и для обеспечения при этом заданных перетоков мощности по ЛЭП.
Основные задачи АСУ ТП эл. станций.Задачи управления (технологического (оперативного)).
Классификация задач.
- По технологическому принципу.
1) задачи управления эл. частью;
2) задачи управления тепловой частью;
3) задачи управления вспомогательным хозяйством станции;
- По типу управления:
1) Контроль и диагностика состояния оборудования;
2) Регулирование параметров режима;
3) Ведение и оптимизация режима.
1. Контроль и диагностика состояния оборудования.Задачи контроля (большинство задач на Украине этим ограничивается). Контроль – сравнение измеренных значений переменных состояния с заданными допустимыми значениями.
Стандартная схема контроля.
Дискретные измерения значений. ![]() вектор заданных значений (может изменятся во времени).
вектор заданных значений (может изменятся во времени).
ОП – оперативный персонал;
ИО – исполнительные органы.

Краткая характеристика задач диагностики.
Под задачей диагностики в АСУ понимают расчётный показатель работоспособности оборудования на основе измерений.
Пример задачи диагностики.
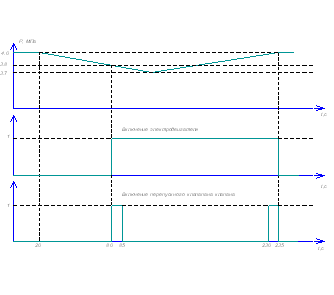
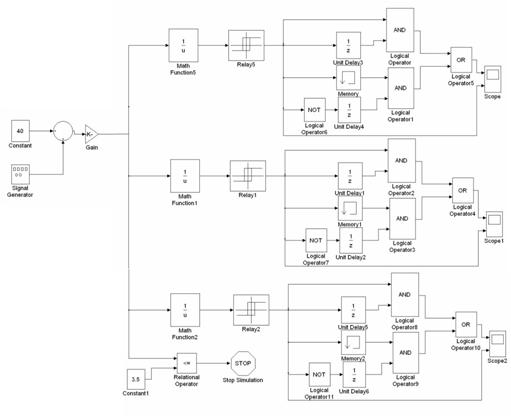
Диагностика выработки коммутационного ресурса ВВ Все ВВ характеризуются коммутационным ресурсом – max допустимое кол-во коммутаций выключателя в различных диапазонах коммутируемых токов.
Решение задачи выработки коммутационного ресурса основано на формуле, определяющей расход ресурса за единичную коммутацию:
![]() ;
; ![]() .
.
Суммарный ресурс:  , где
, где ![]() кол-во коммутаций. Выключатель выработал коммутационный ресурс при
кол-во коммутаций. Выключатель выработал коммутационный ресурс при ![]() .
.
Задачи контроля и диагностики в плане управления реализуются через оперативный персонал, т.е. персонал принимает решения по управлению на основе данных контроля и диагностики. По этому в этих задачах управление осуществляется с задержкой во времени.
Краткая характеристика задач регулирования.Задача регулирования это задача, которая преимущественно формирует управленческие воздействия с целью вернуть значения переменных состояния к заданы значениям при отклонениях. Воздействие осуществляется автоматически без задержки во времени.
![]() опред. алгоритм работы ОС. Этот алгоритм работы такой что б выполнялось условие:
опред. алгоритм работы ОС. Этот алгоритм работы такой что б выполнялось условие: ![]() .
.
Основное – устойчивая работа системы.
Есть системы в которых ![]() . Назыв. они системы стабилизации.
. Назыв. они системы стабилизации.
Задачи ведения режимов это задачи, которые последовательно во времени изменяют состояние или режим технологического объекта управления по заранее определенной последовательности действий. Пример – пуск или останов эн. блока вывод в ремонт выключателя на РУ и т.д.
Задачи оптимизации режимов рассчитывают такие значения режимных параметров, при которых обеспечивается min или max некоторого показателя качества работы технологического объекта управления. Результаты задач оптимизации являются заданными значениями для задач регулирования ![]() . Примеры: задача определения таких мощностей параллельно работающих энергоблоков станции при которых достигается min суммарного расхода топлива (для ТЭС).
. Примеры: задача определения таких мощностей параллельно работающих энергоблоков станции при которых достигается min суммарного расхода топлива (для ТЭС).
В контуре управления АСУ ТП в настоящее время кроме задач контроля, диагностики регулирования, оптимизации и ведения режимов предусматривают группу задач "советчик диспетчера". Эта группа задач вырабатывает рекомендации – советы по принятию решений оперативным персоналом в различных режимных ситуациях на эл. станциях. Сейчас группу задач "советчик диспетчера" называют системой интеллектуального принятия решений (СИПР) оперативным персоналом. СИПР основана на мат. методах и моделях теории нейронных сетей (теория искусственного интеллекта).
3. Управление частотой и активной мощностью в нормальных режимах
электростанция управление автоматизированный энергетический
Статическая характеристика турбоагрегатаВ установившемся режиме должен обеспечиваться баланс активной мощности: ![]() . Баланс мощности имеет смысл если
. Баланс мощности имеет смысл если ![]() и
и ![]() в допустимых пределах. При нарушении баланса отклоняется в первую очередь частота:
в допустимых пределах. При нарушении баланса отклоняется в первую очередь частота: ![]() .
.
![]() момент на валу турбины, где
момент на валу турбины, где
Q – расход энергоносителя (пара или ![]() );
);
Н – давление пара (для ГЭС напор ![]() );
);
η – КПД турбоагрегата;
ω – механическая скорость вращения вала.
![]() , где f – частота тока,
, где f – частота тока, ![]() угловая скорость вращения вектора напряжения генератора.
угловая скорость вращения вектора напряжения генератора.
![]() , * – относительно номинальных значений.
, * – относительно номинальных значений.
Рассмотрим турбину с постоянной мощностью ![]() . Все паровые турбины имеют регулировочные клапаны с помощью которых осуществляется изменение кол-ва пара, подаваемого на турбину. Суть регулирования в том что регулирующие клапаны больше или меньше перекрывают относительное отверстие паропровода, подающего пар на турбину. Если регул. клапаны зафиксировать то
. Все паровые турбины имеют регулировочные клапаны с помощью которых осуществляется изменение кол-ва пара, подаваемого на турбину. Суть регулирования в том что регулирующие клапаны больше или меньше перекрывают относительное отверстие паропровода, подающего пар на турбину. Если регул. клапаны зафиксировать то ![]() .
.
В этом случае: ![]() . В пределах
. В пределах ![]() от номинальных значений эта зависимость линейная.
от номинальных значений эта зависимость линейная.
Статическая характеристика – не зависит от времени. Если ![]() то
то ![]() . Так как наклон большой то любое отклонение f или M приводит к значительному отклонениям M или f. Моментно-скоростная характеристика турбоагрегата при постоянной мощности приводит к значительным отклонениям угловой скорости или f при отклонениях момента на валу турбины. Момент на валу турбины определяется моментом нагрузки (моментом сопротивления). Момент нагрузки на валу определяется изменением эл. нагрузки эн системы (эл. нагрузка данного СГ). Работа с такой характеристикой – недопустима.
. Так как наклон большой то любое отклонение f или M приводит к значительному отклонениям M или f. Моментно-скоростная характеристика турбоагрегата при постоянной мощности приводит к значительным отклонениям угловой скорости или f при отклонениях момента на валу турбины. Момент на валу турбины определяется моментом нагрузки (моментом сопротивления). Момент нагрузки на валу определяется изменением эл. нагрузки эн системы (эл. нагрузка данного СГ). Работа с такой характеристикой – недопустима.
Фиксированных положений РК может быть множество и для каждого состояния своя моментно-скоростная характеристика. Пределы характеристики:
- справа – при полностью открытых РК;
- слева – при устойчивой работе (тех. min по мощности. Технологический минимум электростанции — минимальная нагрузка электростанции, обеспечивающая безопасное для персонала, оборудования, потребителя и окружающей среды состояние работы электростанции, включающая в себя технический минимум собственного оборудования и минимально необходимую нагрузку, обеспечивающую технологический минимум потребителей).
Статическая нагрузка по частотеСтатической характеристикой эл. приёмника по частоте называется зависимость меж мощностью, потребляемой эл. приёмником и частотой: ![]() .
. ![]() мощность нагрузки.
мощность нагрузки.
3 группы эл. приёмников:
1) эл. приёмники, у которых Р не зависит от частоты: ![]() при
при ![]() ;
;
2) эл. приёмники, у которых Р зависит от частоты в первой степени ![]() , где
, где ![]() коэффициент пропорциональности. Это СД и АД с постоянным моментом на валу.
коэффициент пропорциональности. Это СД и АД с постоянным моментом на валу. ![]() ,
, ![]() ;
;
3) эл. приёмники, у которых потребляемая мощность зависит от частоты во второй и выше степени: ![]() , где
, где ![]() Это АД с переменным моментом на валу (вентиляторного типа).
Это АД с переменным моментом на валу (вентиляторного типа).
В каждом узле нагрузки есть эл. приемники всех трёх типов. Можно построит эквивалентную статическую характеристику по частоте узла нагрузки, либо района эн. системы, либо всей энергосистемы в целом. Эквивалентные статические характеристики нагрузки определяются той группой электроприёмников которая составляет большее количество. В современных эл. эн. системах наибольшее кол-во-эл. приёмники второй группы. По этому эквивалентная статическая характеристика нагрузки в пределах ![]() от номинальных значений считаются соответствующими второй группе эл. приёмников, т.е. считаются линейными. Наклон этих характеристик зависит от удельного состава эл. приёмников различных групп для рассматриваемого района эн. системы.
от номинальных значений считаются соответствующими второй группе эл. приёмников, т.е. считаются линейными. Наклон этих характеристик зависит от удельного состава эл. приёмников различных групп для рассматриваемого района эн. системы.
Статические характеристики по частоте называют также регулирующим эффектом нагрузки (РЭН). РЭН является различным для различных эн. систем, для различных узлов нагрузки, для одного узла или системы но в разное время суток. ![]() с
с ![]() . Это положительно для поддержания частоты и по этому называется РЭН.
. Это положительно для поддержания частоты и по этому называется РЭН.
Рассмотрим некоторую эквивалентную характеристику для некоторой эн. системы.
Допустим, что к этой системе произошло подключение нового объема эл. приёмников. Предположим при этом что процентное соотношение меж приемниками различных типов не изменилось. При изменении состава эл. приёмников изменяется наклон статической характеристики нагрузки. Наклон определяется статическим коэффициентом нагрузки, который в о.е.:
 .
.
Определим ![]() экспериментальным путём (для эн. системы). Обычно
экспериментальным путём (для эн. системы). Обычно ![]() . Это значит что при
. Это значит что при ![]()
![]() . Эквивалентную статическую характеристику нагрузки записывают в виде уравнения:
. Эквивалентную статическую характеристику нагрузки записывают в виде уравнения:  , где
, где ![]() ,
, ![]() . Если известно графическая зависимость меж
. Если известно графическая зависимость меж ![]() и f то по этой зависимости легко определить
и f то по этой зависимости легко определить ![]() .
.
Мощность нагрузки создаёт тормозящей момент нагрузки на валах эл. ст. Изменение момента нагрузки ![]() .
.
В т. пересечения – уст. режим – равенство ускоряющего момента турбины и тормозящего момента нагрузки. ![]() мощность вновь подключённой нагрузки (удельный состав эл. приёмников считаем незменным).
мощность вновь подключённой нагрузки (удельный состав эл. приёмников считаем незменным).
При реальных изменениях нагрузки в эн. системе ![]() изменения частоты для нерегулируемых агрегатов эл. станций будет достигать недопустимых величин
изменения частоты для нерегулируемых агрегатов эл. станций будет достигать недопустимых величин ![]() . По этому при изменениях нагрузки в эн. системах надо так менять статические характеристики агрегатов эл. станций что б отклонение частоты лежали в допустимых пределах. Для этого агрегаты эл. ст-ций надо регулировать по мощности.
. По этому при изменениях нагрузки в эн. системах надо так менять статические характеристики агрегатов эл. станций что б отклонение частоты лежали в допустимых пределах. Для этого агрегаты эл. ст-ций надо регулировать по мощности.
Нагрузка увеличивается от Н1 до Н2 на величину ![]() . В результате новый установившейся режим в т. 2. Частота в т. 2 имеет недопустимое значение частоты. Что б частота не изменилась надо поднять мощность турбины.
. В результате новый установившейся режим в т. 2. Частота в т. 2 имеет недопустимое значение частоты. Что б частота не изменилась надо поднять мощность турбины.
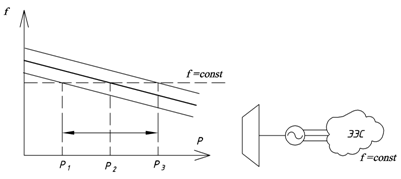
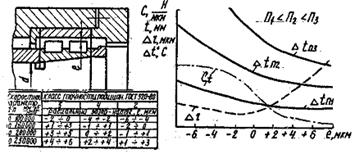
Для изменения мощности турбины используются АРЧВ турбины. Это первичное регулирование частоты в эн. системе. Характеристика 7 – 5 статическая характеристика регулируемой турбины по частоте. Также характеристика 7 – 5 называется астатической характеристикой. Каждая точка на ней соответствует разному значению мощности и разному положению регулирующих клапанов. По этому эту характеристику изображают в координатах ![]() .
.
На всех ТЭС (и АЭС) применяют статические х-ки. На ГЭС стат. и астат. х-ки.
Рассмотрим стат. х-ку регулируемой турбиныТочку х.х. ещё называют уставкой АРЧВ по частоте. Наклон стат. х-ки регулируемой турбины определяется коэффициентом статизма σ. σ можно определить послед. формуле:  , где
, где ![]() любое отклонение частоты. В о.е.:
любое отклонение частоты. В о.е.:  .
.
σ регулируемых ТА-ов нормируются:
![]() в СНГ;
в СНГ;
![]() в Эвропе;
в Эвропе;
![]() США, Канада.
США, Канада.
Стат. х-ку регулируемой турбины можно математически записать так:
![]() ,
, ![]() ,
, ![]() ,
, ![]() . В о.е.
. В о.е. ![]() .
.
Значение σ в% обозначает следующее: что бы нагрузка ТА изменилась от 0 до номинальной надо что бы частота снизилась в СНГ на 4.5%.
Пример определения изменения мощности ТА при изменении частоты в системе.
![]()
![]()
![]() уравнение стат. х-ки ТА.
уравнение стат. х-ки ТА.
 это недопустимо.
это недопустимо.
![]()
![]() допустимо для генераторов.
допустимо для генераторов.
![]()
![]()
![]() соответствует полному открытию РК.
соответствует полному открытию РК.
АРЧВ бывают 3 типов:
1) гидромеханические;
2) гидродинамические;
3) электрогидравлические.
1) и 2) на тепловых (паровых) ТА, 3) на паровых и гидравлических агрегатах.
Основные функции АРЧВ:
1) регулирование частоты вращения турбины (при этом регулируется и мощность турбины);
2) пуск и останов турбины;
3) изменение частоты вращения при синхронизации;
4) распределение нагрузки меж параллельно работающими агрегатами (эн. блоками);
5) участие в общесистемном регулировании частоты;
6) режимные ограничения мощности турбины (все АРЧВ снабжены защитными устройствами, которые ограничивают мощность турбины до заданной величины).
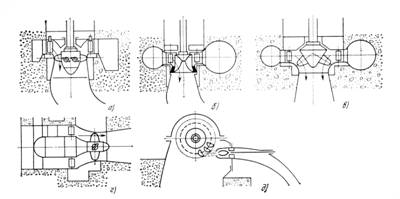
Простейший гидромеханический АРЧВ
Принципиальная схема
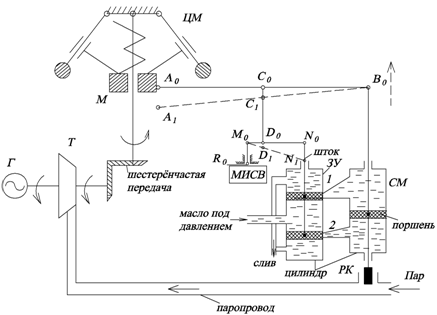
Г – СГ; ЦМ – центробежный маятник; М – муфта на вращающемся валу ЦМ-ка.
Положение муфты проградуировано по скорости турбины и определяет скорость вращения турбины. ЦМ и шестерная передача – это ДЧ (датчик вращения турбины). используется для маломощных ТА (30 МВт и ↓).
МИСВ – механизм изменения скорсти вращения турбины. С помощью МИСВ можно изменять и фиксировать рычаг ![]() . Рычаг
. Рычаг ![]() жесткий рычаг.
жесткий рычаг.
ЗУ – золотниковое устройство – распределяет подачу масла на выходных каналах 1 и 2.
Верхний и нижний полости ЗУ связаны со сливной трубкой.
СМ – сервомеханизм (исполнительное устойство);
ЗУ + СМ – гидроусилитель.
Краткое описание работыДопустим скорость вращения турбины ↓. ЦМ вращается медленнее → М (муфта) сместится вниз. При этом вниз переместится ![]() и
и ![]() .
. ![]() не изменится из-за давлений в СМ (сервомеханизме). Т. М0 – фиксированная.
не изменится из-за давлений в СМ (сервомеханизме). Т. М0 – фиксированная. ![]() ,
, ![]() вниз. Канал 1 соединится со сливной верхней полостью. Масло под давлением в канал 2 → в нижнюю полость СМ. Поршень СМ перемещается вверх. Вверх т.
вниз. Канал 1 соединится со сливной верхней полостью. Масло под давлением в канал 2 → в нижнюю полость СМ. Поршень СМ перемещается вверх. Вверх т. ![]() → РК – вверх → больше пара на турбину → скорость вращения турбины ↑. М вверх → колебательная работа АРЧВ. Колеблется до тех пор пока т. С не вернётся в
→ РК – вверх → больше пара на турбину → скорость вращения турбины ↑. М вверх → колебательная работа АРЧВ. Колеблется до тех пор пока т. С не вернётся в ![]() . При этом т. А и т. В не вернутся в
. При этом т. А и т. В не вернутся в ![]() и
и ![]() (определяется положением РК).
(определяется положением РК).
Установившееся положение СМ будет отличатся от исходного. Мощность Т тоже отлична от исх. С0 и золотник вертаются в исх. положения.
Между положением РК-нов, положения поршня сервомеханизма и т. С рычажной передачи АСВ существует однозначная жесткая связь, обусловленная жесткими рычагами, связывающим т. В с поршнем сервомеханизма и РК-ми. Эта жесткая связь (ЖОС) АРЧВ.
Такая конструкция не может поддерживать постоянство частоты вращения. Такая х-ка статическая (с наклоном).
![]() . В конце переходного процесса
. В конце переходного процесса ![]()
![]() ,
, ![]() ,
,
![]() ,
, ![]() .
.
![]() ;
;  ,
,  коэффициент статизма.
коэффициент статизма.
Из ![]() видно что в данной конструкции АРЧВ и изменить
видно что в данной конструкции АРЧВ и изменить ![]() во время работы ТА невозможно.
во время работы ТА невозможно. ![]() изменяют только во время ремонтных работ.
изменяют только во время ремонтных работ. ![]() на разных ТА – разные. Для больших регулировочных диапазонов – меньший
на разных ТА – разные. Для больших регулировочных диапазонов – меньший ![]() , для малых – больший.
, для малых – больший.
МИСВ АРЧВ это устройство с помощью которого можно изменить уставку по частоте (частоту х.х) и вызвать перемещение стат. х-ки АРЧВ параллельно самой себе.
СДУ – схема диспетчерского управления
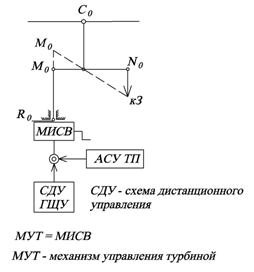
В реальных условиях АРЧВ от 3 до 6%. Изменения достигаются путём изменения и фиксации длины рычага ![]() .
.
Изменение ![]() описать. Т.
описать. Т. ![]() в исходном положении.
в исходном положении. ![]() в иное положение.
в иное положение. ![]() тоже изменяет положение. Изменяется кол-во пара. Изменяется скорость. В конце п.п.
тоже изменяет положение. Изменяется кол-во пара. Изменяется скорость. В конце п.п. ![]() ,
, ![]() .
.
МИСВ снабжают ручным устройством для изменения длины рычага ![]() . Оно проградуировано в ГЦ (по
. Оно проградуировано в ГЦ (по ![]() ). Кроме того есть эл. привод (реверс), который управляется СДУ (сх. дистанционного управления) с ГЩУ. МИСВ используется для изменения числа оборотов турбины при пуске и включении на параллельную работу и при останове.
). Кроме того есть эл. привод (реверс), который управляется СДУ (сх. дистанционного управления) с ГЩУ. МИСВ используется для изменения числа оборотов турбины при пуске и включении на параллельную работу и при останове.
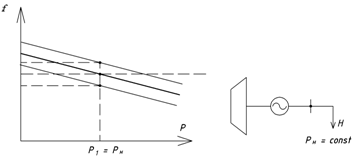
1) параллельная работа агрегатов в эн. системе в которой частота поддерживается неизменной.
2) Работа ТА на выделенную автономную нагрузку.
Изменение уставки МИСВ приводит к изменению частоты. Внешние воздействия по управлению на АРЧВ осуществляется через МИСВ.
В рассмотренной ранее конструкции АРЧВ между точкой В и положением РК имеется жесткая рычажная связь которая называется ЖОС. Для получения астатической характеристики регулирования вместо ЖОС применяют ГОС. Схема ГОС имеет следующий вид:
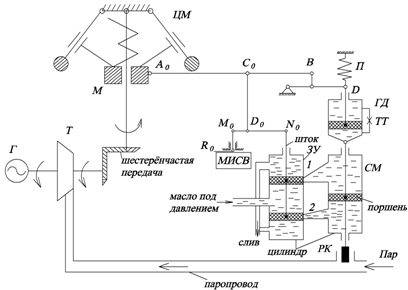
З – золотник. ГОС состоит из П и гидравлического демпфера (ГД). П + ГД – изодронное устройство = ГОС. ГД – это цилиндр, заполненный маслом с поршнем. Вверх и нижняя части цилиндра сообщаются через трубку с малым регулируемым отверстием. ТТ – тонкая трубка.
Работа изодромного устройстваПосле изменения нагрузки турбины, начинается перемещение штока сервомеханизма (СМ). Например, вверх. Поскольку шток жестко связан с корпусом ГД то ГД перемещается вверх и сжимает пружину (П). П. давит на поршень ГД, но медленно из-за тонкой трубки. т. D медленно вверх. Постепенно масло из нижней части в верхнюю. П. разжимается. т. D – вниз. После п.п. т. D в исходное состояние. т В-тоже в исходное состояние. ![]() ,
, ![]() . Если
. Если ![]() .
.
Похожие работы
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... ). Подпрограмма завершена, управление передается назад вызывавшему модулю. 6. Технико-экономическое обоснование 6.1 Пути снижения затрат за счет внедрения системы Внедрение автоматической системы управления маслонапорной установкой гидроэлектростанции решает следующие задачи - Полностью автоматическая система управления маслонапорной установкой не требует участия человека ...

... информация о предприятии. Такая информационная система является инструментом для управления бизнесом и обычно называется корпоративной информационной системой. Информационная система оперативного управления включает в себя массу программных решений по автоматизации бизнес-процессов, имеющих место на конкретном предприятии. Корпоративной Информационной Системы (КИС) — это масштабируемая система, ...
0 комментариев