Навигация
Статическая модель системы частотной автоподстройки частоты
14606
знаков
0
таблиц
10
изображений
Введение
Радиопередающие устройства (РПдУ) применяются в сферах телекоммуникации, телевизионного и радиовещания, радиолокации, радионавигации. Стремительное развитие микроэлектроники, аналоговой и цифровой микросхемотехники, микропроцессорной и компьютерной техники оказывает существенное влияние на развитие радиопередающей техники как с точки зрения резкого увеличения функциональных возможностей, так и с точки зрения улучшения ее эксплуатационных показателей. Это достигается за счет использования новых принципов построения структурных схем передатчиков и схемотехнической реализации отдельных их узлов, реализующих цифровые способы формирования, обработки и преобразования колебаний и сигналов, имеющих различные частоты и уровни мощности.
1. Статическая модель системы частотной автоподстройки частоты
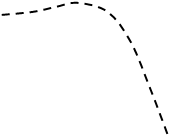
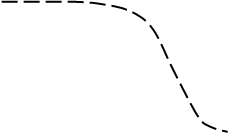
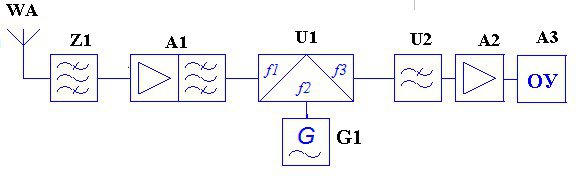
Система частотной автоподстройки частоты (ЧАПЧ) в своем основном применении известна как система автоподстройки частоты гетеродина (см. рис.1). Она предназначена для поддержания равенства промежуточной частоты и средней частоты амплитудно-частотной характеристики УПЧ. Требуемое значение промежуточной частоты задается переходной частотой fперех дискриминационной характеристики частотного дискриминатора ЧД. Типичный вид дискриминационной характеристики показан на рис. 2.
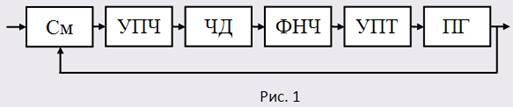
Если промежуточная частота равна переходной, то напряжение на выходе частотного дискриминатора равно нулю и частота гетеродина не изменяется.
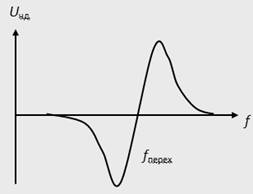
При отклонении промежуточной частоты от переходной появляется напряжение на выходе частотного дискриминатора, которое вызывает изменение частоты гетеродина так, чтобы уменьшилось отклонение промежуточной частоты. Дискриминационная характеристика описывается нелинейной зависимостью Uчд = Uчд(Df), где Df = f – fперех. Можно объединить перестраиваемый генератор, смеситель и УПЧ в один сложный перестраиваемый генератор, и тогда система ЧАПЧ примет вид, представленный на рис. 3.

Для определения характеристик системы в установившемся режиме составляется статическая модель. В ней отражаются только функциональные преобразования процессов. Статическая модель системы изображена на рис. 4.
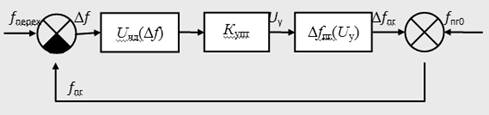
При ее составлении учитывалось, что для постоянного воздействия коэффициент передачи ФНЧ равен 1, а частота перестраиваемого генератора fп г = fпг0 + Dfпг, где fпг0 – частота ПГ при управляющем напряжении, равном нулю, и Dfпг – приращение частоты перестраиваемого генератора, зависящее от управляющего напряжения. Суммирующее и вычитающее устройства можно заменить одним вычитающим, так как Df = fперех – fпг0 - Dfпг. Введем новую переменную - начальную расстройку Dfнач = fперех – fпг0, тогда Df = Dfнач - Dfпг Преобразованная статическая модель показана на рис.5.

Эта модель описывается системой алгебраических уравнений:
Uу =Купт U чд(Df), (1,а)
Df = Dfнач - Dfпг(Uу). (1,б)
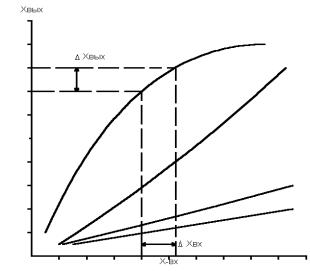
Графическое решение этой системы уравнений показано на рис. 6,а. Уравнение (1,б) представлено семейством линий, зависящих от значения начальной расстройки. Значение расстройки в установившемся режиме Dfуст равно горизонтальной координате точки пересечения линий, а значение управляющего напряжения в установившемся режиме Uу уст – вертикальной координате этой точки. На рис. 6,б показана зависимость расстройки в установившемся режиме Dfуст от начальной расстройки. Для линии, отмеченной звездочкой *, показано, как определяется положение точки на зависимости Dfуст(Dfнач).Если увеличивать начальную расстройку от нуля, то будет увеличиваться и расстройка в установившемся режиме. Решение системы уравнений будет перемещаться по линии ОА. Это решение соответствует режиму эффективной автоподстройки, для которого Dfуст<<Dfнач. Начальная расстройка, при которой линия 1,б будет касательной линии 1,а в точке А, определяет границу режима эффективной автоподстройки. При дальнейшем увеличении начальной расстройки решение перейдет в точку В. Расстройка в установившемся режиме будет близка к начальной расстройке.

Это режим отсутствия автоподстройки. Начальная расстройка, при которой система ЧАПЧ выйдет из режима эффективной автоподстройки, называется полосой удержания. Если теперь увеличивать начальную расстройку, то режим отсутствия автоподстройки будет сохраняться до тех пор, пока линия 1,б не станет касательной к линии 1,а в точке С. При малейшем уменьшении начальной расстройки система ЧАПЧ перейдет в режим эффективной автоподстройки. Начальная расстройка, при которой система ЧАПЧ входит в режим эффективной автоподстройки, называется полосой захвата.
Режим, соответствующий решению системы алгебраических уравнений на участке АС, будет неустойчив. Это можно показать следующим образом. На спадающем участке дискриминационной характеристики тангенс угла наклона, равный коэффициенту передачи дискриминатора, отрицательный и поэтому обратная связь положительная. При положительной обратной связи система устойчива, если коэффициент передачи по петле обратной связи меньше единицы. Для точки D, находящейся на участке АС, модуль тангенса угла наклона линии 1,а больше модуля тангенса угла наклона линии 1,б: ½tga1½>½tga2½. Но tga1 = Кчд, а tga2 = =1¤Кпг. Следовательно, ½Кчд½>½1¤Кпг½ и ½КчдКпг½>1. Значит, состояние системы ЧАПЧ, соответствующее решению D, будет неустойчивым.
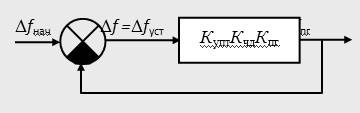
Для оценки качества работы в режиме малых расстроек используется коэффициент автоподстройки Кап = =Dfнач/Dfуст, который показывает, во сколько раз система ЧАПЧ уменьшает начальную расстройку. Его можно найти из статической модели, если заменить нелинейные зависимости линейными, т.е. Uчд(Df) = КчдDf и Dfпг(Uу) = Кпг Uу. Тогда нелинейная статическая модель преобразуется в линейную, показанную на рис. 7. Для нее Dfуст = Dfнач – Купт Кчд КпгDfуст. Отсюда Кап = 1+КуптКчдКпг = 1+K, где K – коэффициент передачи разомкнутой системы. В анализируемой модели дискриминационная характеристика описывается выражением:
Uчд(Df) = 1 ¤ [1 + (Df - Df0)2] – 1 ¤ [1 + (Df + Df0)2]. (2)
Модель системы приведена на рис. 8. Операция возведения в квадрат реализуется блоком умножения. Перестраиваемый генератор считается линейным устройством. ФНЧ, УПТ и ПГ моделируются инерционным звеном с передаточной функцией К ¤ (1 + 0,1p).
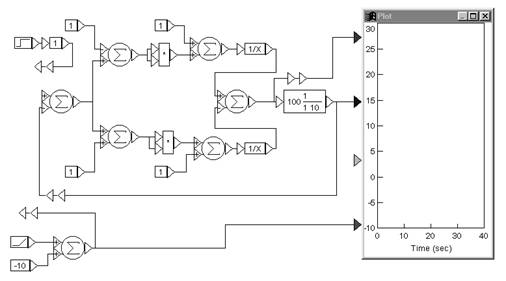
Рис. 8
Дополнительная информация по тематике лабораторной работы изложена в [1, §1.2], [2, §2.1, 7.1], [4, §2].
Похожие работы
... состояние, отнесенное к единичному возмущению на входе. Единичным возмущением считают однопроцентное изменение входной величины объекта (перемещение регулирующего органа). 2. Динамические ошибки в системах авторегулирования Системы автоматического регулирования всегда находятся под влиянием двух видов воздействий: задающего и возмущающего. Задающее воздействие определяет, каким должен ...

... полезных сигналов, а также динамический диапазон сигналов на выводе РПрУ не должно превышать 10 дБ. 4 Анализ и моделирование структуры РПУ Так как для общих характеристик радиоприемного устройства исходными данными для расчета являются не только диапазон рабочих частот, но и параметры приемной антенны, такие как емкость, индуктивность, активное сопротивлении и тд. Следовательно будем ...
... рисунков в формате А0-А1 со скоростью 10-30 мм/с. Фотонаборный аппарат Фотонаборный аппарат можно увидеть только в солидной полиграфической фирме. Он отличается своим высоким разрешением. Для обработки информации фотонаборный аппарат оборудуется процессором растрового изображения RIP, который функционирует как интерпретатор PostScript в растровое изображение. В отличие от лазерного принтера в ...
... . Российские летательные аппараты, совершившие посадку на Венеру в 1982 г., послали на Землю цветные фотографии с изображением острых скал. Благодаря парниковому эффекту, на Венере стоит ужасная жара. Атмосфера, представляющая собой плотное одеяло из углекислого газа, удерживает тепло, пришедшее от Солнца. В результате скапливается большое количество тепловой энергии. Цифровая радиолиния с ...
0 комментариев