При решении любой задачи управления, осуществляемого человеком или автоматическим регулятором, необходимо, прежде всего, иметь объект управления со всеми его коммуникациями и производственным процессом. Объектом управления может быть: отдельное управляемое техническое устройство, либо управляемый комплекс устройств, либо более простая система управления. В последнем случае более сложная система управления включает в свой состав более простую систему или подсистему, которыми управляет сложная система.
При организации производственных процессов, например, строительного производства часто ставится задача по снижению трудоемкости технологических процессов путем их механизации и автоматизации. Для этих целей применяют строительно-дорожные машины и подъемно-транспортные устройства (СДМ и ПТМ), которые являются объектами автоматизации.
По отдельным видам СДМ решается следующий комплекс задач:
- для землеройных машин циклического действия обеспечивается программное управление и автоматическое определение глубины разрабатываемого грунта, в частности на экскаваторах циклического действия ручное управление остается пока при наборе грунта в ковш, а подъем ковша, поворот и выгрузка с последующим возвратом выполняются автоматически по определенной программе;
- для скреперов, бульдозеров, автогрейдеров осуществляется автоматическое регулирование оптимального использования мощности двигателей и программное управление рабочими органами, так как тяговое усилие скрепера, роторного, траншейного экскаватора и других землеройных машин в процессе резания грунта и заполнения ковша изменяются в широких пределах в зависимости от глубины резания и свойств грунта;
- для землеройных машин непрерывного действия обеспечивается регулирование их скорости движения в зависимости от развиваемых усилий при резании и программное управление работой машин при разработке траншей заданного профиля с учетом рельефа местности и оптимального регулирования загрузки приводных двигателей;
- учет производительности землеройных и землеройно-транспортных машин путем использования устройств для учета физических объемов выполненных работ и вычислительных устройств для непрерывного учета к.п.д. машины и учета расхода горюче-смазочных материалов;
- для охраны труда и предотвращения аварийного состояния, машины снабжаются системами контроля и аварийными сигнализациями.
Перечень задач по автоматизации машин и механизмов можно продолжить бетоносмесительными и растворосмесительными установками, агрегатами для асфальтобетонных работ, погрузочно-разгрузочными механизмами, подъемными механизмами, свайными механизмами и т.д. Аналогично определяются задачи в других отраслях производства.
Для эффективного решения выделенного комплекса задач и многих других, не упомянутых здесь, необходимо детальное изучение технологических процессов объектов управления, правильный выбор параметров управления и средств автоматизации в соответствии с характеристиками объектов. В результате детального изучения нужно сформировать типовые характеристики объектов, влияющие на процесс управления и качество регулирования, выделить физические величины объекта и принять их в качестве параметров управления.
3.1 Основные свойства объектов регулирования
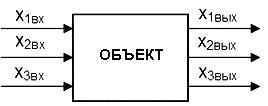
Объект, включенный в систему управления, получает воздействие окружающей среды (возмущения) и воздействие управляющих устройств (регулирующее воздействие). Их называют входными воздействиями на объект. Входные воздействия вызывают динамические процессы внутри объекта, определяемые физическими величинами, значения которых контролируются и принимаются за выходной сигнал объекта. Упомянутые физические величины в системе управления называют регулируемыми. Простейший объект регулирования (ОР) имеет одну регулируемую величину. Объект регулирования обычно характерен притоком F1 (подачей) и стоком F2 (расходом) вещества или энергии. Если приток равен стоку, объект находится в равновесии – статический режим. При разности между притоком и стоком в объекте имеет место переходный процесс – динамический режим. Соответственно зависимость между входными и выходными величинами определяется статическими и динамическими характеристиками приведенными выше во втором разделе.
Вместе с тем объекты регулирования имеют свои характеристики: емкость, самовыравнивание и запаздывание.
Под емкостью объекта понимают способность накапливать энергию, объем вещества, количество тепла, влажность среды и другие параметры , по которым осуществляется регулирование объектом. Другимисловами емкость объекта определяет запас энергии или вещества, содержащийся в нем при заданном значении параметра регулирования. Чем меньше емкость объекта, тем быстрее изменяется регулируемый параметр при воздействии возмущений на объект. Следовательно, большая емкость объекта упрощает задачу автоматического регулирования, т.к. при этом уменьшается скорость изменения параметра регулирования и ослабляются все динамические процессы регулирования.
Емкость объекта характеризуется коэффициентом емкости, т.е. количеством регулирующего потока энергии или вещества, подводимого к объекту (или отводимого от него), который необходим для изменения параметра регулирования на единицу его измерения. Например, при регулировании температуры двигателя внутреннего сгорания (ДВС) коэффициентом емкости можно считать то количество тепла, которое необходимо ввести в ДВС или вывести из ДВС, чтобы изменить его температуру на 1ОС. Коэффициент емкости ДВС зависит от количества охлаждающей жидкости в системе охлаждения. Это объем водяной рубашки, объем радиатора, объем рабочих цилиндров ДВС, которые в целом определяют аккумулированное количество тепла в ДВС, характеризующее инерцию объекта.
Самовыравнивание – это такое свойство объекта, в силу которого, при воздействии на объект возмущением, параметр регулирования стремиться самостоятельно к новому установившемуся значению без участия регулятора.
Свойство самовыравнивания характеризуется степенью, которую можно определить как отношение увеличения (уменьшения) подачи возмущающего потока энергии или вещества в объект, необходимого для перевода параметра регулирования от одного установившегося значения до другого установившегося значения к величине изменения параметра регулирования. Чем больше степень самовыравнивания, тем меньше реакция объекта на возмущение и тем легче осуществить регулирование объекта, потому что в этом случае объект сам стремит параметр регулирования к стабильному значению.
Проанализируем свойство самовыравнивания на примере простейшей и в то же время наиболее распространенной, современной САР на основе поплавкового регулятора уровня. Она используется в камере карбюратора двигателя внутреннего сгорания и показана на рисунке 12.
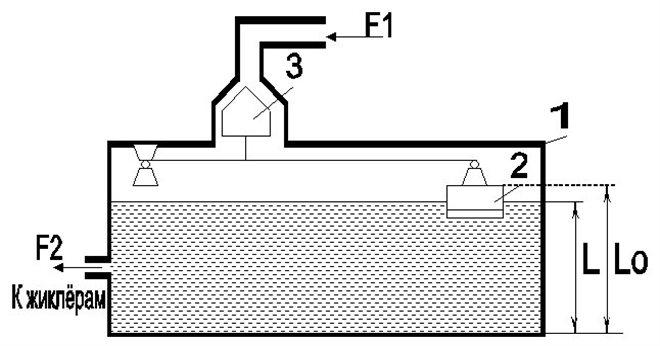
Рисунок 12 – Система с поплавковым регулятором
Объектом регулирования является поплавковая камера 1. Параметр регулирования – уровень L топлива, который измеряется положением поплавка 2 и через систему рычагов с запорной иглой (клапан 3) уровень регулируется притоком топлива F1. Приток F1-регулирующее воздействие.
Проследим свойство самовыравнивания, абстрагируясь от участия регуля-тора в этом процессе.
При уровне L=L0 игла полностью закрывает канал притока , т.е. F1=0. В процессе работы ДВС канал приоткрыт и дает некоторый приток F1. На камеру 1 действует возмущение - расход топлива F2, который самотеком через жиклеры подается в ДВС. Этот расход приводит к снижению уровня в поплавковой камере, что вызывает снижение гидростатического давления высоты столба топлива на жиклеры и соответственно уменьшение расхода F2. Наступит равновесное статическое состояние при F2=F1 и понижение уровня топлива прекратится. Таким образом, в поплавковой камере возник процесс, обеспечивающий самостоятельное стремление уровня к установившемуся значению без участия регулятора. Это и есть самовыравнивание.
Если же расход F2 создать принудительно, например, с помощью специального насоса, то объект не будет обладать свойством самовыравнивания.
Запаздывание объекта регулирования – это время, необходимое для преодоления инерционности объекта. Запаздывание подразделяют на переходное (емкостное) и передаточное. Сумма времени переходного и передаточного запаздываний называется временем полного запаздывания.
Передаточное запаздывание –это задержка в изменении параметра регулирования Хи за счет движения воздействий в объекте от места его подачи до места установки чувствительного элемента датчика регулятора.
Переходное запаздывание – это замедление в изменении параметра регулирования Хи за счет емкости объекта. Это запаздывание отрицательно сказывается на качестве регулирования, т.к. оно ведет к сдвигу по фазе между выходным и входным сигналом объекта, что в конечном итоге может вызвать неустойчивость регулирования. В этой связи время полного запаздывания учитывают соответствующим коэффициентом в дифференциальном уравнении движения системы и определяют запаздывание так называемой постоянной времени объекта регулирования.
Постоянная времени определяется по проекции касательной к кривой переходного процесса на ось времени, либо по длительности интервала времени, за который переходный процесс выполняется на 63%. При постоянной скорости изменения кривой переходного процесса касательную можно провести в любой точке этой кривой. На рисунке 9 она проведена в начальной точке переходного процесса (момент t1). Пересечение касательной с уровнем установившегося значения в момент t’1 от начала переходного процесса определяет интервал t1-t’1 равный постоянной времени (Т). Чем больше постоянная времени объекта, тем медленнее изменяется параметр регулирования при поступлении воздействия на объект.
Похожие материалы
... затраты перешли в категорию безвозвратных, управление ими становится бессмысленным и сводится к констатации факта с последующим ретроспективным анализом и контролем. Эта особенность затрат как объекта управления обусловливает тот факт, что управление затратами должно иметь преимущественно превентивный характер, то есть решения о затратах должны приниматься до того, как эти затраты возникнут. ...
... степеней свободы. Величину критерия Фишера (F-критерий) определяют по формуле: (должно быть). Значимость коэффициентов bi уравнения регрессии определяют по t-критерию (критерии Стьюдента): , . Идентификация объектов управления методом корреляционного анализа Метод корреляционного анализа используется для идентификации объектов управления в том случае, если входные и выходные ...
... . Технологические инновации затрагивают изменения в технологии (способах) создания, производства и потребления выпускаемой или новой продукции. Организационно-управленческие инновации связаны с внедрением новых методов организации каких-либо систем и управления ими. По степени новизны следует различать радикальные и имитирующие инновации. Эти понятия связаны с теорией циклического развития, и ...
... вид плановой работы, состоящей в разработке стратегических решений (в форме прогнозов, проектов программ и планов), предусматривающих формирование таких целей и стратегий поведения объектов управления, реализация которых обеспечивает их эффективное функционирование в долгосрочной перспективе, быструю адаптацию к изменяющимся условиям внешней среды. Стратегическому планированию присущи следующие ...
... осуществлением мероприятий по управлению инновационной деятельностью. Соотношение между этими видами менеджмента непостоянно и носит ситуационный характер. Инновационная деятельность как объект управления характеризуется рядом параметров, управление которыми вызывает большие сложности. Например, функции менеджера направлены на поддержание достигнутого состояния системы, приобретение ею нового ...
... компонентов производственного цикла, их переработку, распределение, продажу продуктов переработки и другие мероприятия. Данный тип организационной структуры управления означает деятельность во всем цикле продукта – от разведки и разработки нефтяных и газовых месторождений, транспортировки жидкой и газообразной продукции, комплексной переработки продукта до его реализации конечным потребителям. В ...
0 комментариев