4.1.1 По роду энергии , используемой для приведения в действие составных элементов регуляторов, их подразделяют на пневматические, гидравлические, электрические и комбинированные (электропневматические, электрогидравлические).
В пневматических регуляторах источником рабочей энергии и носителем передаваемых сигналов является сжатый воздух. Действие пневматического регулятора основано на изменении давления воздуха под действием параметра регулирования и на преобразовании давления воздуха в механическое усилие для перемещения мембран, трубок, поршней и т.д. Пневматический регулятор представляет собой набор взаимосвязанных пневматических устройств: различных дросселей, мембран, упругих элементов, камер и соединительных трубок. Работа регулятора обеспечивается подводом к нему очищенного сжатого воздуха со стабильным давлением.
Пневматические регуляторы широко применяют в промышленности благодаря высокой надежности, простоте эксплуатации, а также пожаро- и взрывобезопасности. В принципе их можно использовать для регулирования любых физических величин. Для этого нужно лишь ввести в состав регулятора соответствующий измерительный преобразователь и возможно нормирующий блок.
Конструкция и технические возможности гидравлического регулятора аналогичны пневматическому. Здесь используется лишь другой энергоноситель –давление жидкости. Но в месте с тем в гидравлических регуляторах появляется положительный момент - отсутствие сжатия жидкости по сравнению с воздухом. Это позволяет развивать большие усилия в гидравлическом регуляторе, потому они находят применение в СДМ.
Однако в практике промышленного производства наиболее распространены электрические регуляторы. Их достоинство состоит в простоте и удобстве использования электроэнергии, дающей возможность простой передачи воздействий на расстояние, простой связи между регулятором и переферийными устройствами. Это расширяет функциональные возможности регуляторов.
В качестве электрических регуляторов пока еще используются автоматические мосты, автоматические потенциометры и дифференциально-трансформаторные автоматические приборы. Для этого упомянутые приборы оснащаются контактно-кулачковым формирователем управляющего воздействия, позволяющим осуществить двух или трехпозиционное регулирование.
Для непрерывного регулирования используют пропорциональные и изодромные регуляторы типа ПР1, ИР.
В настоящее время эти регуляторы заменяются электронными микроконтроллерами типа Ремиконт, Ламиконт, Симатик, Адам. Благодаря использованию микроэлектроники микроконтроллеры обеспечивают высокое быстродействие и широкие функциональные возможности.
4.1.2 По назначению различают регуляторы температуры, давления, расхода, перемещения и т.д. Определяется это параметром регулирования. Но современные регуляторы универсальны благодаря включению на их входе нормирующих блоков. Это стандартные блоки, обеспечивающие преобразование сигналов различной природы в стандартный унифицированный сигнал. Например, в электрический ток 0-5 мА преобразует токовый преобразователь, к которому могут быть подключены различные измерительные преобразователи параметров объекта регулирования. Существуют также пневматические преобразователи.
Тем не менее, конкретно смонтированный универсальный регулятор будет определен по назначению группой параметров управления.
4.1.3 По способу действия на объект регулирования или способу связи с регулирующим органом регуляторы делят на две группы: непосредственного (прямого) действия, в которых усилие, необходимое для перемещения регулирующего органа, создается изменением параметра регулирования без применения постороннего источника энергии и непрямого (косвенного) действия, работающие с использованием постороннего источника энергии.
Примером регулятора прямого действия может служить показанный выше на рисунке 12 поплавковый регулятор уровня топлива в камере карбюратора двигателя внутреннего сгорания. Его структурная схема показана на рисунке 13.
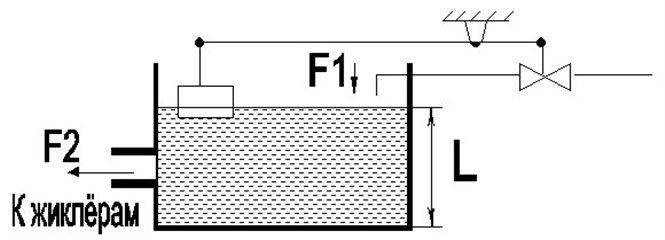
Рисунок 13 – Система с поплавковым регулятором
Регулирующий орган (клапан, запорная игла) перемещается за счет изменения уровня топлива, вызывающего перемещение поплавка через силу Архимеда. Больше здесь никаких источников энергии нет.
Наглядно видна простота такого регулятора. Но этот регулятор имеет существенные недостатки: низкую чувствительность и рывковое движение регулирующего органа.
Низкая чувствительность предельно ясно проявляется в следующем эксперименте. Предположим, что ДВС уменьшил число оборотов, тогда F2 < F1 и уровень топлива начнет повышаться. Повышение уровня топлива должно переместить поплавок вверх, клапан вниз, приток F1 уменьшится, достигнет равенства F1=F2 и уровень топлива не будет повышаться. Однако сразу это не произойдет. Дело в том, что для перемещения клапана вниз нужна сила поплавка, превышающая силы трения в клапане. Поэтому уменьшение числа оборотов ДВС, уменьшит расход F2, уровень топлива начнет повышаться, поплавок будет погружаться в топливо и вытеснять необходимый объем жидкости, вес которой образует упомянутую необходимую силу для движения клапана. Только после накопления вытесненного поплавком объема начнется движение клапана и отработка неравенства F2 <F1. Получается, что уровень изменяется, а клапан не двигается, т.е. параметр регулирования изменяется, а регулирующее воздействие не появляется в ответ на это изменение. Регулятор не чувствует изменение параметра регулирования. Эта чувствительность появляется лишь после накопления необходимого объема жидкости.
Образуется зона нечувствительности регулятора.
Рывковое движение регулирующего органа происходит следующим образом. При неподвижном клапане возникают капиллярные соединения между золотником и седлом клапана. Золотник удерживается капиллярными силами в неподвижном состоянии. Потому в приведенном выше эксперименте вытеснение и накопление необходимого объема топлива поплавком происходит в расчете на силы трения в клапане и капиллярные силы. Но как только начнется движение клапана, капиллярные соединения обрываются, и мгновенно освобождается сила, накопленная для них. В результате образуется избыточная сила, дающая рывковое движение клапана.
Рывковое движение исключает возможность малого перемещения клапана, что создает явление перерегулирования, т.е. переход регулирующего органа через положение, соответствующее равновесному состоянию системы. Это вызывает колебательный режим работы регулятора и динамическую ошибку регулирования.
Пример регулятора непрямого действия показан на рисунке 14. По схеме этого рисунка видно, что усилие для перемещения регулирующего органа создается электромагнитом ЭМ, который работает за счет энергии электросети. Усилие поплавка здесь используется только для коммутации контактов К1, К2, обеспечивающих подачу энергии электросети к исполнительному механизму ЭМ через схему управления. В результате поплавок не нагружен силами трения. Он более подвижен, т.е. чувствителен к изменению уровня.
На работу регулятора не влияют здесь и капиллярные силы, так как мощность на выходном штоке исполнительного механизма заведомо больше сил трения и капиллярных сил и движение клапана определяется только мощностью исполнительного механизма.
В результате регулятор непрямого действия имеет выше чувствительность, большую точность регулирования, но он сложнее по устройству и соответственно дороже.
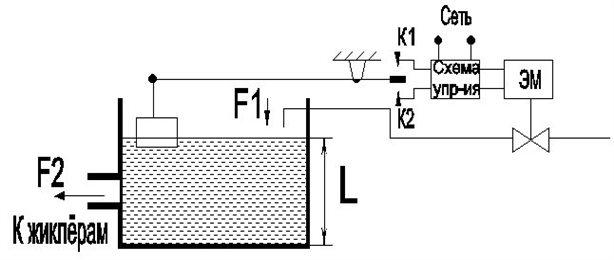
Рисунок 14 – Система с регулятором непрямого действия
4.1.4 По скорости изменения регулирующего воздействия регуляторы бывают с постоянной и переменной скоростью перемещения регулирующего органа.
Регуляторы с постоянной скоростью сохраняют эту скорость неизменной в любых ситуациях и на всем интервале процесса регулирования. В итоге эту скорость нельзя сделать большой, потому что при большой скорости увеличивается продолжительность движения регулирующего органа после его выключения за счет инерции. Это явление называют выбегом, который создает перерегулирование, т.е. переход параметра через заданное значение, вызывающий колебательный режим работы и появление динамической ошибки регулирования.
С другой стороны, небольшая скорость перемещения регулирующего органа не обеспечивает высокое быстродействие регулятора, соответственно увеличивается время регулирования.
Регуляторы с переменной скоростью при включении в процесс регулирования перемещают регулирующий орган с большой скоростью, а по мере приближения параметра регулирования к заданному значению уменьшают скорость перемещения. Это обеспечивает почти мгновенную остановку регулирующего органа в момент выключения движения при равенстве параметра регулирования с заданным значением, что исключает недостатки регулятора с постоянной скоростью.
4.1.5 По характеристике действия, т.е. характеру связи между входной и выходной величинами, регуляторы делятся на прерывного (дискретного) и непрерывного действия.
В первом случае регулятор включает свое воздействие на объект регулирования мгновенно (скачком) и периодически в виде последовательности импульсов, длительность и частота повторения которых зависит от истинного значения параметра регулирования только в определенные моменты времени процесса регулирования.
Во втором случае регулятор непрерывно, т.е. плавно воздействует на регулирующий орган в течение всего времени регулирования, пока параметр регулирования достигнет заданного значения с определённой точностью.
Наиболее наглядно это можно показать с помощью «характеристики действия регулятора», под которой понимают две, связанные между собой зависимости. Одна зависимость показывает изменение регулирующего воздействия во времени, а вторая показывает соответствующее изменение параметра регулирования в том же времени. В итоге выявляется зависимость между изменением параметра регулирования и регулирующим воздействием.
Характеристика действия двухпозиционного регулирования с неполным отключением регулирующего воздействия показана на рисунке 15.
Регуляторы прерывного действия. Примером дискретного регулятора является устройство в системе на рисунке 14. Характеристика действия системы показана на рисунке 15.Рассмотрим процесс формирования характеристики действия.
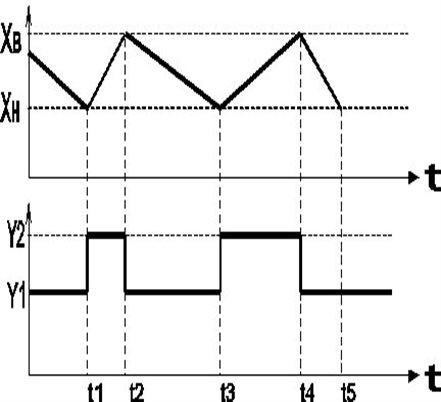
Рисунок 15 – Характеристика действия дискретного регулятора
Поплавок соединен с переключателем контактов К1, К2. При снижении уровня топлива поплавок (в момент t1 на рисунке 15) замыкает контакт К1, который через релейную схему управления включает электромагнит клапана и открывает его скачком (дискретно). Уровень топлива повышается до верхнего Хв значения. В момент t2 поплавок замыкает контакт К2 и через промежуточное реле выключает электромагнит клапана скачком (дискретно). Клапан перемещает золотник из полностью открытого состояния на 50% открытие. Уровень понижается до нижнего Хн значения и с момента tз процесс повторяется.
Кривая изменения регулирующего воздействия (У) наглядно показывает периодичность включения воздействия в моменты t1,t3 и изменение длительности импульсов воздействия. Очевидно, в момент tз нагрузка на объект регулирования возросла и потому подъем параметра регулирования до верхнего предела Хв замедлился по сравнению с интервалом t1–t2, а скорость снижения до нижнего Хн предела увеличилась в интервале t4–t5. Нагрузкой (возмущением) на объект регулирования здесь является потребление топлива ДВС.
Функциональная зависимость регулирующего воздействия (У) имеет разрыв в моменты t1,t2, t3, t4, т.е. прерывается закономерность и такое управление называют прерывным.
В процессе регулирования моменты включения (t1, t3) и выключения (t2, t4) определяются значением параметра регулирования. Эти значения фиксированы верхним Хв и нижним Хн пределами. В остальные моменты времени регулирующее воздействие не зависит от величины параметра регулирования и сохраняется на определенном значении (позиции). Таких значений здесь два - при полном открытии клапана У2 и при пятидесятипроцентном открытии У1. В результате регулирование и регулятор называют двухпозиционными.
В регуляторах такого типа происходит квантование, т.е. преобразование регулирующего воздействия в дискретную величину. В данном случае квантование происходит по уровню входного сигнала Хи. Регулирующее воздействие в данном случае не достигает нулевого значения, поэтому регулирование называют с неполным отключением воздействия.
При позиционном регулировании параметр (уровень топлива) все время изменяется в диапазоне от минимального до максимального значения, что является недостатком такого регулирования. Этот диапазон называют зоной регулирования, в пределах которой параметр имеет разброс от среднего значения, снижающий точность регулирования. Можно повысить точность уменьшением диапазона, но тогда увеличится частота включения регулирующего воздействия, что приведет к снижению срока службы регулятора.
Регуляторы непрерывного действия имеют непрерывную функцию регулирующего воздействия во времени. Следует иметь в виду непрерывность по закономерности изменения, а не по остановке процесса регулирования. Все регуляторы прерывают процесс регулирования, если параметр регулирования достигает заданного значения.
Примером регулятора непрерывного действия является устройство на рисунке 12 и 13. Характеристика действия приведена на рисунке 16.
Процесс формирования характеристики действия следует из принципа действия САР. До момента t1 наблюдался равновесный режим, в этот момент ДВС увеличил обороты, соответственно увеличилось потребление топлива F2 и уровень начал снижение. Следом за уровнем опускается вниз поплавок, он открывает клапан, увеличивается приток F1 и снижение уровня прекращается в момент t’1 , начинается его возврат к заданному значению. В момент t2 уровень достигает заданного значения. Если в этот момент обороты ДВС уменьшатся, то произойдет переход уровня через заданное значение и аналогичное, но противофазное, изменение процесса регулирования. Так будет происходить до наступления равновесного режима в момент t5.
Характерно, что регулирующее воздействие У в данной системе изменяется плавно (по непрерывному закону) в течение всего интервала регулирования t1¸t5. Здесь отсутствуют релейные изменения и каждому моменту времени соответствует только одно значение У. Поэтому такой регулятор называют регулятором непрерывного действия.
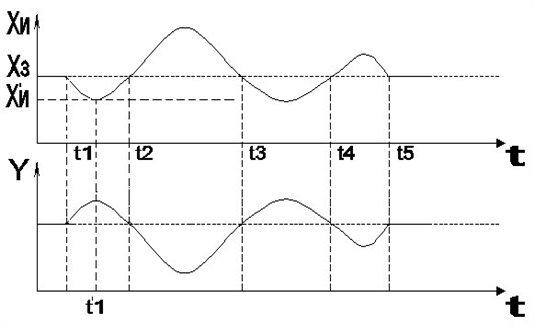
Рисунок 16 – Характеристика действия регулятора непрерывного действия
Плавное изменение регулирующего воздействия в соответствии с величиной отклонения параметра регулирования обеспечивает стабилизацию параметра на определенном заданном значении, что дает бóльшую точность по сравнению с прерывным регулированием, при котором параметр регулирования непрерывно изменяется в пределах зоны регулирования.
4.1.6 По закономерности изменения регулирующего воздействия регуляторы непрерывного действия делятся на пропорциональные (статические), интегральные (астатические) и пропорционально- интегральные (изодромные).
Пропорциональный регулятор (или П-регулятор) – это такой регулятор, у которого регулирующее воздействие на объекте прямо пропорционально ошибке регулирования. Другими словами у П-регулятора величина перемещения регулирующего органа пропорциональна отклонению параметра регулирования.
Из определения П-регулятора следует, что регулирование происходит по пропорциональному закону:
у= Кр•DXи (7)
где у – величина перемещения регулирующего органа;
DXи – ошибка регулирования (сигнал рассогласования);
Кр – коэффициент передачи (усиления) регулятора, являющийся настроечным параметром регулятора.
Это означает, что каждому значению параметра регулирования соответствует строго определенное (единственное) положение регулирующего органа и определенная величина регулирующего воздействия. В итоге между регулирующим воздействием и отклонением регулируемой величины существует жёсткая линейная зависимость, как в статическом так и в динамическом режимах.
В пропорциональных регуляторах величина перемещения регулирующего органа на один процент отклонения параметра регулирования может быть установлена заранее настройкой регулятора. Диапазон этой настройки, в пределах которого изменение параметра регулирования вызывает перемещение регулирующего органа из одного крайнего положения в другое, называют пределом пропорциональности регулятора.
Примером пропорционального регулятора может служить устройство в системах на рисунках 12 и 13. В этих примерах определенное значение параметра регулирования (уровня) дает соответствующее положение поплавка, а он соответствующее положение клапана, определяющего приток F1. Здесь не может быть движения клапана без движения поплавка, т.е. без изменения параметра регулирования. Между ними существует жесткая, однозначная зависимость, обеспечивающая пропорциональность.
По рисунку 16 видно, что за счет упомянутой однозначной связи сигнала Хи датчика и выходного сигнала (У) регулятора, закономерности их изменения повторяют друг друга. Именно эта однозначная связь порождает недостатки П-регулятора. Главный из них – неспособность регулятора вернуть параметр Хи объекта к заданному значению, если поступившее на объект возмущение остается на нем.
Например, в системе на рисунке 13, при увеличении числа оборотов ДВС, увеличится расход F2 и уровень топлива начнет уменьшаться (см. рисунок 16 ). К моменту t’1 уменьшение прекратится за счет дополнительного открытия клапана и увеличения притока F1 до равенства с F2. В момент t’1 F1=F2 и если обороты ДВС остались увеличенными и неизменными, то наступит равновесие САР, при пониженном значении уровня Х'и. Далее уровень останется неизменным на этом пониженном значении т.к. F1=F2. Уровень не может вернуться на прежнее значение, ибо при этом поплавок и клапан также вернутся на прежнее положение, при котором F1 < F2. Это соотношение не позволит поднять уровень и он останется на значении Х'и. (на рисунке 16 это не показано). Установится остаточная статическая ошибка dст=Хз-Х'и., которую называют статизмом.
Регуляторы, обладающие таким свойством, называют статическими.
Все П-регуляторы статические.
Таким образом, можно выделить следующие характерные свойства пропорционального регулятора.
Каждому значению параметра регулирования соответствует единственное, определенное положение регулирующего органа.
Различным установившимся значениям возмущающих воздействий на объекте соответствуют различные установившиеся значения параметра регулирования.
Пропорциональный регулятор обладает статизмом, и чтобы его исключить конструируют регуляторы непропорциональные.
Рассмотрим динамические характеристики П-регулятора.
Передаточная функция для идеального (безынерционного) регулятора имеет вид W(p)=Кр, а переходная характеристика воспроизводит форму входного воздействия, увеличивая его в К раз.
АФЧХ П-регулятора W(jw)=Кp (рисунок 17) изображается в комплексной плоскости точкой с координатами (КР;0) , расположенной на вещественной полуоси. Для реального регулятора при возрастании частоты до бесконечности коэффициент Кр снижается до нуля и АФЧХ имеет вид штриховой линии.
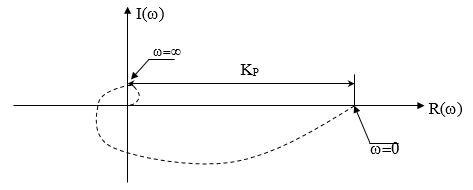
Рисунок 17 – АФЧХ пропорционального регулятора
Интегральный регулятор (или И-регулятор).
Уинтегрального регулятора величина регулирующего воздействия определяется интегралом от ошибки регулирования.
![]() (8)
(8)
где, у - величина перемещения регулирующего органа;
DХи - ошибка регулирования (отклонение);
Ти - постоянная времени, определяющая быстродействие регулятора.
Постоянную Ти называют временем изодрома. Изодром по гречески означает ровный бег.
Зависимость (8) показывает гибкую связь регулирующего воздействия (У) с отклонением (DХи). Это позволяет И-регулятору перемещать регулирующий орган в одном направлении независимо от величины ошибки регулирования, до полного ее исчезновения, т.е. до тех пор, пока параметр регулирования примет заданное значение. Иначе говоря, при регулировании по интегралу регулятор стремится устранить отклонение без статической ошибки, т.е. регулятор астатический.
Пример интегрального регулятора показан на рисунке 18, а его характеристика действия на рисунке 19.
Регулятор работает так. Если уровень топлива равен заданному Хз, то поплавок находится в положении, при котором движок реостата (R) совпадает со средней точкой (С.Т.). В этом случае, разность потенциалов между движком и средней точкой равна нулю и схема управления оставляет выключенным электродвигатель М. Такое состояние системы называют равновесным, оно показано на рисунке 19 до момента t1.
В момент t1 на объект регулирования поступило возмущение, например, ДВС увеличил обороты, и потребление F2 топлива увеличилось. Тогда возникает неравенство F2 > F1. Уровень топлива понижается, поплавок движется вниз вместе с уровнем и перемещает движок реостата (R) вверх. Между движком и средней точкой (С.Т.) возникает напряжение соответствующей полярности.
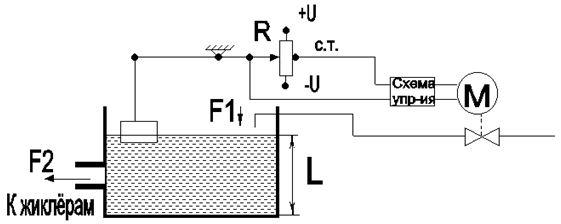
Рисунок 18 – Система с И-регулятором
(движок “+”, C.T “-“). Это напряжение включает электродвигатель М на увеличение притока F1. Исполнительный механизм с постоянной скоростью открывает клапан и приток линейно нарастает до момента t2. Это препятствует снижению уровня топлива и начинает его возврат к заданному значению в момент t'1. В момент t2 уровень достигает заданного значения, движок реостата окажется в средней точке (С.Т.), напряжение между движком и средней точкой станет равным нулю и исполнительный механизм М останавливается. При этом, если бы параметр регулирования остановился на заданном значении, то и клапан остановился бы в дополнительно открытом состоянии.
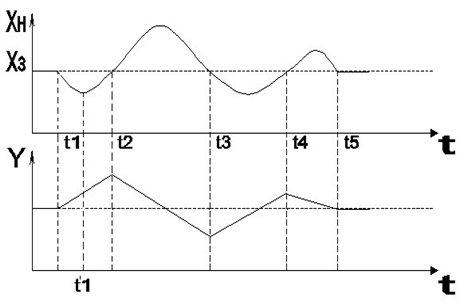
Рисунок 19 – Характеристика действия И-регулятора
Если же к моменту t2 ДВС уменьшит число оборотов, то это вызовет переход уровня через заданное значение, тогда поплавок перемещает движок реостата (R) вниз от средней точки (С.Т.), снова возникает напряжение между движком и средней точкой, но уже другой полярности. Это напряжение включает исполнительный механизм М на закрытие клапана, приток F1 уменьшается, препятствует повышению уровня топлива и возвращает его к заданному значению в момент t3 и т.д. Регулирование заканчивается в момент t5.
Характерно, что изменение регулирующего воздействия непропорционально изменению параметра регулирования. Изменение знака приращения регулирующего воздействия (направления движения регулирующего органа) происходит только в момент перехода параметра через заданное значение, т.е. в моменты t2, t3, t4. Это означает, что регулятор подает воздействие на объект до полной компенсации ошибки регулирования с определённой точностью.
Отсутствие отклонения параметра регулирования – необходимое условие равновесия интегрального регулятора.
По характеристике действия (рисунок 19) видно, что регулирующее воздействие (У) изменяется в разных пределах, изменения разной продолжительности, а установившиеся значения (У1,У2) имеют разные уровни. Но суммарный результат значений (У1,У2) интегрально отображен на параметре регулирования (Хи). Такая зависимость между воздействием регулятора и отклонением параметра регулирования определяется интегралом, а регулятор, обладающий этой зависимостью называют интегральным или И-регулятором. Его основное достоинство – отсутствие статизма, соответственно обеспечение высокой точности регулирования.
Однако высокая точность порождает колебательный режим работы системы регулирования.
Дело в том, что в составе регулятора имеются инерционные звенья и в первую очередь исполнительный механизм и регулирующий орган. В этой связи в момент достижения параметра регулирования (Хи) заданного значения (Хз), когда регулятор (рисунок 19) выключит механизм (М), продолжится его движение по инерции. Это явление называют выбегом ИМ и РО. В результате регулирующее воздействие продолжит своё увеличение в момент t2, либо уменьшение в момент t3. За счет этого параметр регулирования вновь отклоняется в сторону, противоположную начальному рассогласованию. Это явление называют перерегулированием. Регулятор отрабатывает это новое отклонение с теми же возможностями и совершает новое перерегулирование, возникает бесконечный колебательный процесс с динамической ошибкой регулирования и точность регулирования теряется. Все интегральные регуляторы имеют склонность к перерегулированию и, как следствие, к колебательному режиму работы.
Явление перерегулирования можно исключить уменьшением скорости движения исполнительного механизма и регулирующего органа, т.е. уменьшением быстродействия регулятора. При какой-то минимальной скорости ИМ и РО смогут останавливаться сразу после их выключения. Но тогда увеличится время регулирования, что влечет к несходящемуся процессу регулирования, потому что при большом времени регулирования увеличивается вероятность поступления на объект нового возмущения, которое создаст новое отклонение. Регулятор еще не отработал прежнее отклонение, как уже создается новое отклонение и так будет до бесконечности. Но медленно действующий регулятор будет успевать компенсировать малые отклонения, т.к. для небольших отклонений ему потребуется соответственно малый интервал времени, поэтому И-регуляторы применяют для объектов с малыми отклонениями, не имеющих запаздывание и способных к самовыравниванию. Для большинства объектов И-регуляторы применяют в комплекте с другими регуляторами, в частности с П-регулятором, тогда образуется ПИ-регулятор.
Таким образом, становится очевидным, что И-регулятор, обладая способностью приходить в равновесие при любых положениях регулирующего органа и при точном достижении параметра регулирования заданного значения, имеет следующие недостатки:
- склонность к колебательному режиму работы и соответственно формированию динамической ошибки;
- малое быстродействие, которое создают в И-регуляторе специально для исключения перерегулирования;
- уменьшенный запас устойчивости регулирования.
Динамические характеристики интегрального регулятора следующие.
Передаточная функция W(p)=kp/p. Для идеального (безынерционного) И-регулятора переходная характеристика возрастает линейно и неограниченно. Скорость возрастания обратно пропорциональна времени изодрома (Ти). АФЧХ регулятора W (jw) показана на рисунке 20. Она изображается в комплексной плоскости на мнимой отрицательной полуоси. Для реального регулятора АФЧХ показана пунктиром.
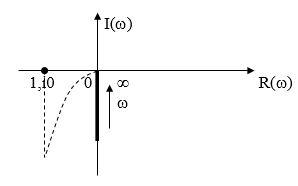
Рисунок 20 – АФЧХ интегрального регулятора
Пропорционально-интегральный регулятор (или ПИ-регулятор) состоит из пропорциональной и интегральной частей. Действие такого регулятора можно рассматривать как совместное действие статического и астатического регуляторов, т.е. регулирующее воздействие ПИ-регулятора пропорционально отклонению параметра регулирования и его интегралу.
![]() (9)
(9)
где у - величина перемещения регулирующего органа;
DХи – ошибка регулирования (отклонение);
Кр – коэффициент передачи (усиления);
Ти – время изодрома.
Время изодрома - это коэффициент, имеющий размерность времени и характеризующий интенсивность введения интеграла в закон регулирования.
Регулирование ПИ-регулятора происходит как бы в два этапа: сначала пропорциональная составляющая оперативно приближает параметр Хи к заданному значению и уменьшает основную часть ошибки регулирования до остаточной статической ошибки, а затем интегральная составляющая производит дорегулирование до полного возврата параметра Хи к заданному значению. Чтобы исключить перерегулирование, интегральную составляющую специально делают медленно действующей. Это обеспечивается установкой в регуляторе времени изодрома Ти. Наличие пропорциональной составляющей в регуляторе обеспечивает быструю реакцию на появление ошибки регулирования, т.е. высокое быстродействие, а интегральная составляющая обеспечивает высокую точность.
В целом ПИ-регулятор дает высокую точность регулирования за счет интегральной составляющей, которую называют изодромом, а сам регулятор изодромным.
Пример изодромного регулятора приведен на рисунке 21.
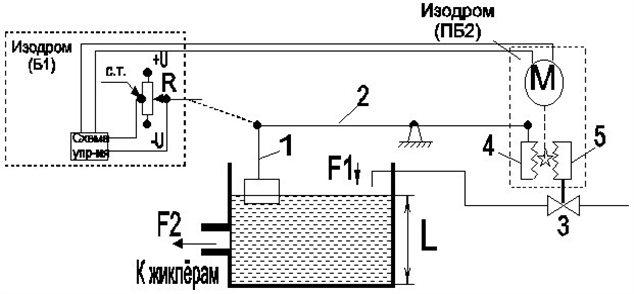
Рисунок 21 - Система с изодромным регулятором.
Для наглядности ПИ-регулятор построен на той же камере карбюратора (объект регулирования), которая была в пропорциональном и интегральном регуляторе.
Пропорциональная (статическая) часть регулятора состоит из поплавкового датчика уровня (ИП), соединенного штоком 1 с весовым рычагом 2 (ЭС) и плавающего блока (ПБ2) изодрома. Блок ПБ2 нужно рассматривать в этой части как единое целое, т.е. с неподвижными внутренними деталями. Эта часть представляет обычный пропорциональный регулятор прямого действия. Он показан на рисунках 12 и 13 в разделе “регуляторы”.
Интегральная (астатическая) часть состоит из двух блоков.
Первый блок (Б1) содержит реостатный потенциометрический датчик (R) и схему управления, в составе которой имеется усилитель и набор промежуточных реле для реверсирования низкооборотного микродвигателя (М). Этот блок формирует управляющее воздействие изодрома.
Второй блок (ПБ2) плавающий, потому что он может целиком перемещаться вверх (вниз) под действием рычага 2 и соответственно перемещать клапан 3. Внутри ПБ2 установлен микродвигатель (М), связанный с зубчатыми рейками 4 и 5 через шестерню. При неподвижной шестерне зубчатые рейки также неподвижны относительно друг друга и образуют монолитный шток клапана 3. Вращение микродвигателя по часовой стрелке будет перемещать рейку 4 вверх, а рейку 5 вниз и удлинять шток клапана относительно рычага 2. Вращение микродвигателя против часовой стрелки наоборот укорачивает шток клапана. Это позволяет перемещать клапан микродвигателем (М) при неподвижном рычаге 2.
Принцип работы системы с ПИ-регулятором.
В равновесном состоянии уровень (L=Хи) равен заданию, которое задано геометрическим положением реостата (R) по высоте относительно камеры карбюратора (соответственно положением движка реостата относительно С.Т.), движок реостатного датчика (R) находится в средней точке (С.Т.) сигнал этого датчика равен нулю, двигатель (М) с рейками и клапаном неподвижны. При появлении возмущения на ОР (см. описание рисунок 12 и 13) параметр Хи=L отклоняется от задания. Мгновенно следуя за уровнем двигаются поплавок, движок реостата, рычаг 2 и целиком блок ПБ2 с клапаном 3. Движение клапана обеспечивает быстрое изменение притока F1 и тем самым уменьшает основное отклонение параметра регулирования до остаточной статической ошибки.
Если статическая ошибка есть, то движок реостатного датчика (R) отклонен от средней точки (С.Т.). Тогда этот датчик дает напряжение и схема управления включает низкооборотный двигатель (М), который обеспечивает медленное дополнительное движение клапана при неподвижном поплавке. Конечно же это движение клапана вызовет изменение уровня и движение поплавка к заданному значению. В итоге параметр Хи объекта и поплавок с движком реостата возвращаются в положение, соответствующее заданному значению параметра регулирования, т.е. движок возвращается в точку С.Т. Напряжение между движком и точкой С.Т. станет равным нулю и двигатель (М) останавливается.
Таким образом действие интегральной части ПИ-регулятора полностью проявляется в переходном процессе регулирования и затем исчезает в установившемся (равновесном) режиме.
За счет низкооборотного двигателя (М) исключается выбег ИМ и РО и перерегулирование. Изменение скорости вращения двигателя (М) задает время изодрома (Ти). Для этого регулятор имеет соответствующий орган настройки под названием “ время изодрома”. Он находиться в блоке Б1.
Динамические характеристики ПИ-регулятора следующие.
Передаточная функция:
W(p)=Кр+Кр/Ти·p (10)
где Кр/Ти – коэффициент передачи интегральной части регулятора.
При беспредельном увеличении постоянной времени Ти ПИ-регулятор превращается в П-регулятор, потому что вклад интегральной части станет равным нулю.
Переходная характеристика идеального и реального ПИ-регулятора приведена на рисунок 22 а,б.
В идеальном варианте сигнал на выходе регулятора мгновенно достигает значения (К) за счет пропорциональной части и затем линейно время Ти удваивается за счет интегральной части, потому время изодрома Ти еще называют временем удвоения. Однако регулятор и тем более систему безынерционными физически нельзя реализовать, поскольку в них тогда должны возникать сигналы неограниченно большой мощности. В реальных условиях ПИ-регулятор с помощью пропорциональной части изменяет свое воздействие по экспоненте до момента t1 (кривая 1) после которого сформируется статическая ошибка dст, а далее интегральная часть регулятора дорабатывает воздействие (У2) до (У1), при котором параметр регулирования достигнет задания в момент t2. Необходимо отметить, что в реальном регуляторе интервал времени t1-t2 может быть значительно больше.
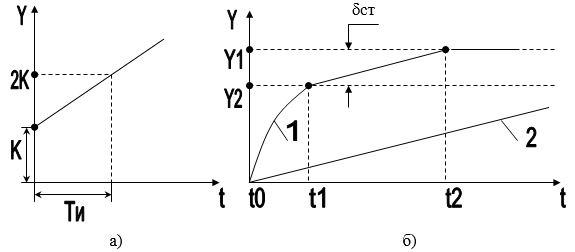
Рисунок 22 – Переходные характеристики ПИ-регулятора:
а)идеальная; б) реальная: Y1 при Xи=Xз,Y2 при наличии статической ошибки.
Если отключить пропорциональную часть, то оставшаяся интегральная сформирует кривую 2, которая параллельна линейному наклонному участку кривой 1. Переходный процесс закончится далеко за пределами рисунка, когда кривая 2 достигнет значения (У1). Это показывает разницу в быстродействии пропорционального и интегрального регуляторов, созданную специально в изодромном регуляторе.
ПИ-регуляторы позволяют устойчиво и без статической ошибки регулировать работу большого числа промышленных объектов с высоким качеством регулирования. По этой причине они получили большое распространение на практике. Единственным ограничением их применения является сложность конструкции, что повышает стоимость ПИ-регулятора и усложняет техническое обслуживание.
В этой связи, если технология в объекте регулирования допускает наличие статической ошибки, конечно же применяют пропорциональный регулятор, либо регулятор двухпозиционный. Например, это допустимо при регулировании запаса воды в водонапорной башне системы водоснабжения, при регулировании давления в ресивере компрессора, либо температуры в морозильной камере холодильника. Неточность регулирования запаса воды в водонапорной башне отклонит уровень воды и изменит давление в водопроводной сети, но процесс водоснабжения обеспечивается.
Если же мы автоматизируем процесс дозирования концентрированного раствора хлора из бака-дозатора в расходуемый поток воды к потребителям, то уровень раствора в баке-дозаторе нужно поддерживать точно на заданном значении, так как уровень обеспечивает соответствующую дозу подачи хлорного раствора из бака-дозатора в питьевую воду. Здесь необходимо применить ПИ-регулятор уровня.
Аналогично применение ПИ-регулятора необходимо в технологиях: химического производства, пищевой промышленности, энергетики и других.
Похожие материалы
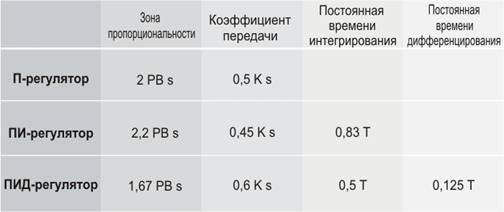
... ПИ- и ПИД-регуляторов при использовании метода Циглера - Николса, а на рис. 51 показан график регулируемой величины в режиме автоколебаний. Рис.2 Применение ПИД-регулятора на примере моделирования автоклава При стерилизации (пастеризации) должен строго соблюдаться установленный технологической инструкцией режим (температура, продолжительность и давление при стерилизации, пастеризации) с ...
... элементов, входящих в состав регулятора. Ниже мы рассмотрим основные законы регулирования, разновидности САР и регуляторов. 1.5 Разновидности систем автоматического регулирования Большое разнообразие современных САР не позволяет определить их однозначную классификацию, так как системы различных типов имеют свои функциональные признаки. Однако, объединение САР в классификационные группы ...
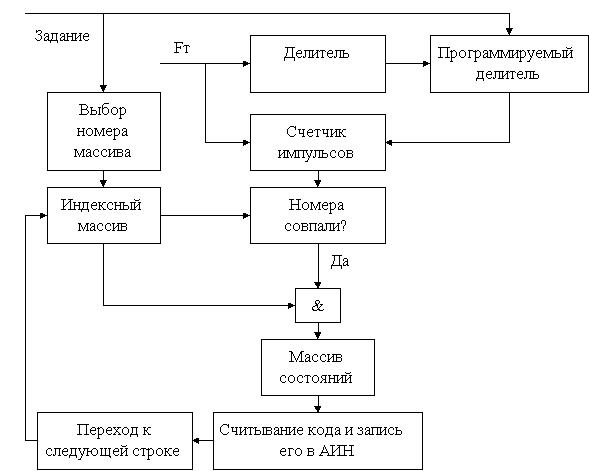
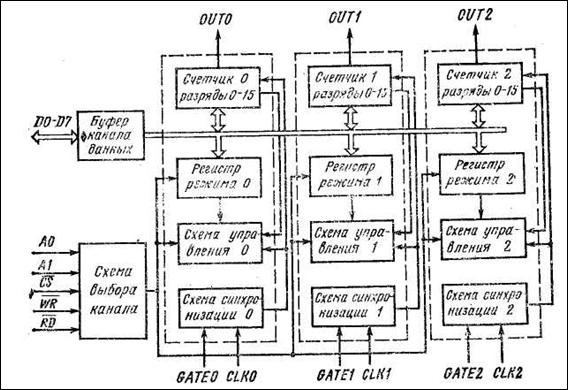
... для выставления строба записи и выбора режима записи в таймер-счётчик. На рисунке 12 изображены контакты LPT порта и их принадлежность тому или иному регистру. Рисунок 12 Для формирования на выходе ШИМ- регулятора импульсов с заданной скважностью и периодом, таймер-счётчик КР580ВИ53 был запрограммирован в режим работы 2 и 1 – соответственно таймер-счётчик 1 и 0 . Таймер-счётчик 2 не ...


... и взаимодействий человека с другими людьми и средой в целом (миром животных, техники, культуры и т. д.), выстроить более адекватную систему рабочих понятий научной дисциплины. Эргатические функции Логика развития профессии заключается в неизбежной дифференциации многих ранее исторически сложившихся трудовых постов и рабочих мест, в оформлении и изменении трудовых функций субъектов труда, в ...
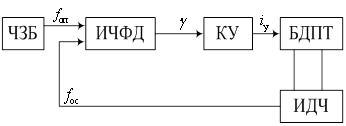
... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
0 комментариев