Навигация
РОЗРОБКА СИСТЕМИ ВЕКТОРНОГО КЕРУВАННЯ АСИНХРОННИМ ДВИГУНОМ
34023
знака
4
таблицы
30
изображений
3 РОЗРОБКА СИСТЕМИ ВЕКТОРНОГО КЕРУВАННЯ АСИНХРОННИМ ДВИГУНОМ
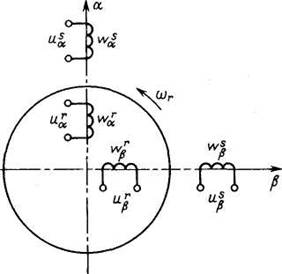
Для моделювання систем керування АД прийнято використовувати матемаматичну модель, яка записується в стаціонарній системі координат (a-b).
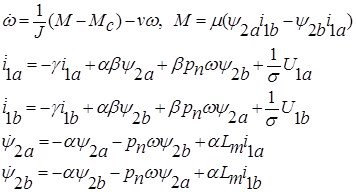
де ![]() – кутова швидкість ротора,
– кутова швидкість ротора,
![]() – компоненти вектора струму статора в системі координат (a - b),
– компоненти вектора струму статора в системі координат (a - b), ![]() – компоненти вектора потокозчеплень ротора,
– компоненти вектора потокозчеплень ротора,
![]() – компоненти вектора напруги статора,
– компоненти вектора напруги статора,
![]() – момент навантаження,
– момент навантаження,
![]() – коефіцієнт в’язкого тертя.
– коефіцієнт в’язкого тертя.
Додатні константи, що відносяться до електричних і механічних параметрів АД, визначені в попередньому розділі.
Напма’ятаємо лише, що:
 .
.
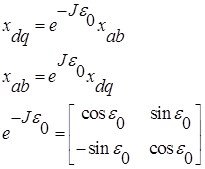
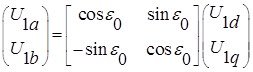
Для переходу з системи координат (a - b), у синхронну систему координат ротора (d – q), яка обертається відносно стаціонарної системи координат з швидкістю ![]() , виконаємо перетворення Парка-Горева, яке визначається наступними рівняннями:
, виконаємо перетворення Парка-Горева, яке визначається наступними рівняннями:
Проблема відпрацювання заданих траєкторій кутової швидкості – потокозчеплення формулюється наступним чином. Припустимо, що для моделі АД, заданої, виконується наступне:
А.1. Струми статора та кутова швидкість ротора доступні для вимірювання.
А2. Параметри АД відомі і незмінні.
А3. Момент навантаження c ![]() невідомий, постійний та обмежений.
невідомий, постійний та обмежений.
А4. Задані траєкторії кутової швидкості ![]() і потокозчеплення
і потокозчеплення ![]() є обмеженими функціями з обмеженими першою та другою похідними по часу [1].
є обмеженими функціями з обмеженими першою та другою похідними по часу [1].
В умовах цих припущень відбувається проектування прямого алгоритму керування, яке для заданого варіанту роботи необхідно спроектувати. Таким чином виконується глобальне асимптотичне відпрацювання заданих траєкторій швидкості – потокозчеплення, тобто
![]() - при обмеженні усіх внутрішніх змінних
- при обмеженні усіх внутрішніх змінних
Регулятор потоку:
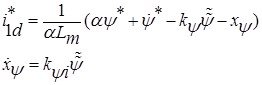
Регулятор струму по осі (d):
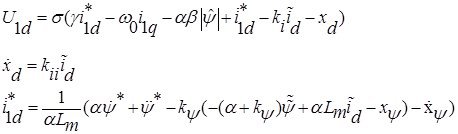
Регулятор швидкості:
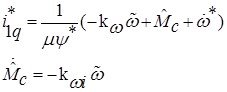
Модифікований регулятор струму по осі (q):
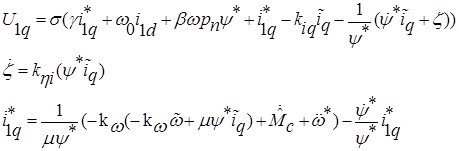
Реальні напруги, що прикладаються до обмоток статора двигуна, дорівнюють:
Повний алгоритм робастного непрямого векторного керування АД буде містити:
Регулятор потоку:
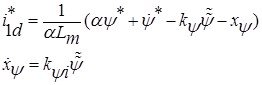
Регулятор струму по осі (d):

Регулятор швидкості:
Модифікований регулятор струму по осі (q):
Реальні напруги, що прикладаються до обмоток статора двигуна, дорівнюють:

4 МОДЕЛЮВАННЯ НЕПРЯМОГО ВЕКТОРНОГО КЕРУВАННЯ ДЛЯ АД
Методом математичного моделювання, виконаємо дослідження статичних та динамічних характеристик. Базуючись на математичній моделі для прямого векторного керування, яка описана у попередньому пункті. Зібрана система прямого векторного керування у програмі MATLAB «Simulink», дозволяє з легкістю побудувати графіки перехідних процесів заданого АД, згідно завданню.
При відомих параметрах АД, виконаємо тест який буде включати у себе наступні етапи:
1) збудження двигуна;
2) відпрацювання траєкторії розгону;
3) накидання статичного номінального навантаження;
4) скидання статичного номінального навантаження;
5) відпрацювання траєкторії гальмування;
З рисунків 4.1 – 4.2 видно, що система прямого векторного керування відпрацьовує задану траєкторію. Як видно з отриманих графіків перехідних процесів система чітко виконує з нульового значення часу полеорієнтування, що можна побачити з графіку для потокозчеплення по осі q і d; Бачимо, що потокозчеплення по осі q дорівнює нулю, що свідчить про орієнтованість вектор потокозчеплення ротора зорієнтован по осі d. Також з графіків перехідних процесів, можна побачити, що система прямого векторного керування забезпечую повністю асимптотичне відпрацювання швидкості при накидання статичного навантаження, іншими словами відсутня статична похибка [6]. При розгоні і гальмуванні ми бачимо, що система повністю повторює задану траєкторію, а це в сою чергу свідчить про відсутність динамічної похибки. У цілому можна сказати, що система повністю виконує асимптотичність відпрацювання:
Для номінального значення швидкості маємо наступні графіки перехідних процесів:
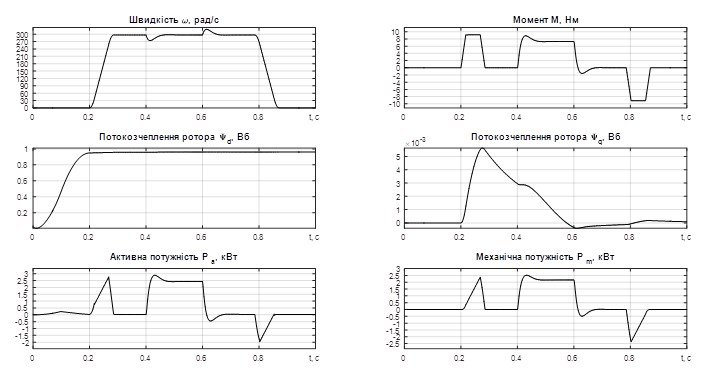
Рисунок 4.1 – Графік перехідних процесів при моделювання прямого векторного керування за номінальним значенням швидкості
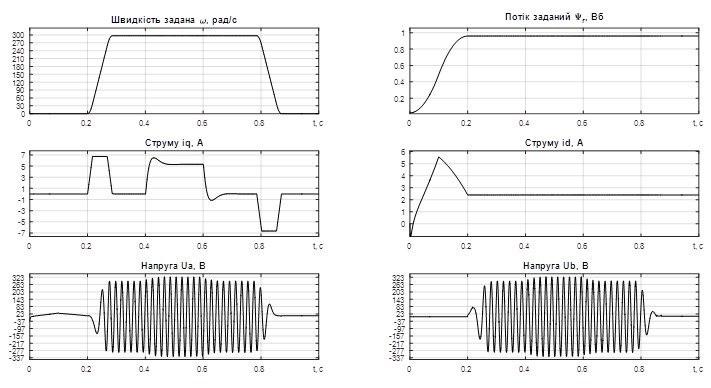
Рисунок 4.2 – Графік перехідних процесів при моделювання прямого векторного керування за номінальним значенням швидкості
Бачимо, що навідміну від звичайного частотного керування, при прикладанні моменту навантаження збільшується прикладена напруга і струм статора, що забезпечує підтримання швидкості на постійному рівні. Також спостерігаємо збільшення частоти струму при розногі і прикладанні навантаження. При частотному керуванні при прикладанні моменту зменшувався струм і відповідно просідала швидкість. Тобто векторне керувння забезпечує постійність швидкості при прикладанні моменту. Також з графіків струму бачимо наявність в системі форсування для пришвидшення намагнічування системи, збільшення її швидкодії.
Також з графіків перехідних процесів видно, що при скорості яка була задана як ![]() , напруга яка подається на статор дорівнює значенню 325 В.
, напруга яка подається на статор дорівнює значенню 325 В.
Необхідно відмітити, що при переході від трифазної моделі двигуна до двухфазної були виконанні відповідні перетворення і над напруго мережі, в результаті чого ми отримали напругу амплітудою в 311 В. Таким чином, перетворювач частоти не може збільшувати напругу мережі вище за це значення, тому в реальних системах, векторне керування забезпечує роботу двигуна на швидкостях де - що менших за номінальну. Виходячи з цього при відпрацювання номінальної швидкості напруга статора і вийшла трохи більша, а ніж та напруга яку може видати на виході перетворювач. Це обумовлено тим, що при моделюванні у робочій програмі попередньо не було враховано обмеження даного параметра. Тому виходячи з найпростішого, а саме з елементарного моделюючого підбору підберемо таке значення швидкості при якій напруга статора не буде перевищує значення 311В. І з відповідних графіків перехідних процесів, що зображенні на рисунку 4.3 – 4.4, ми бачимо, що швидкість ![]() , є граничною швидкістю у відповідності до напруги у 311В.
, є граничною швидкістю у відповідності до напруги у 311В.
Побудуємо графіки перехідних процесів для заданої швидкості ![]()

Рисунок 4.3 – Графік перехідних процесів при моделювання прямого векторного керування з швидкістю ![]()
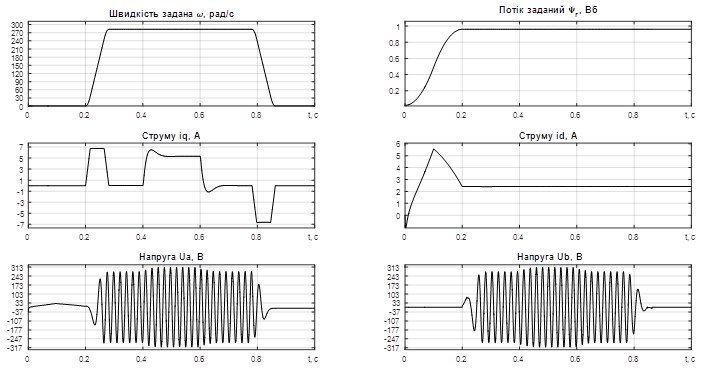
Рисунок 4.4 – Графік перехідних процесів при моделювання прямого векторного керування з швидкістю ![]()
Виконаємо дослід відпрацювання нульової швидкості при накиданні номінального моменту навантаження і подавимось як у цьому випадку буде відпрацьовуватися швидкість. Побудуємо залежності для відпрацювання цієї швидкості, та виконаємо їх аналіз.
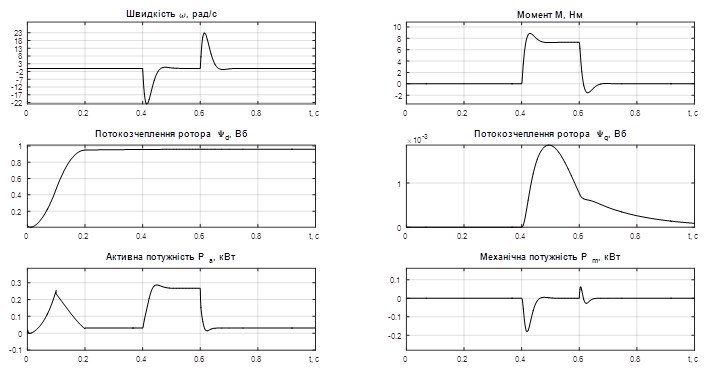
Рисунок 4.5 – Графік перехідних процесів при моделювання прямого векторного керування з швидкістю ![]()
Рисунок 4.6 – Графік перехідних процесів при моделювання прямого векторного керування з швидкістю ![]()
З приведених на рисунку 4.5 - 4.6 графіків, бачимо, що при нульовій швидкості система відпрацьовує положення 0. Система залишається полеорієнтованою і при накиданні моменту видно, що вектор потокозчеплення не змінює орієнтації. Система швидко реагує на навантаження і в свою чергу збільшує значення струм iq, який створює момент зворотного напрямку по відношенню до моменту навантаження, тим самим утримуючи систему на нульовому положенні. Цікавим є поведінка напруги, така форма обумовлена тим, що для утримання навантаження при нульовій швидкості інвертору необхідно прикласти до обмотки статора напругу, що можна і побачити на графіках вище.
Виконаємо дослід прибравши першу і другу похідні за швидкістю. Як видно на полеорієнтування це не впливає, але при відсутності похідних, з’являються додаткові похибки - коливання з різними знаками при розгоні та гальмуванні двигуна, а також накиданні і скиданні моменту навантаження, що видно з графіка швидкості (див. рис.4.7).
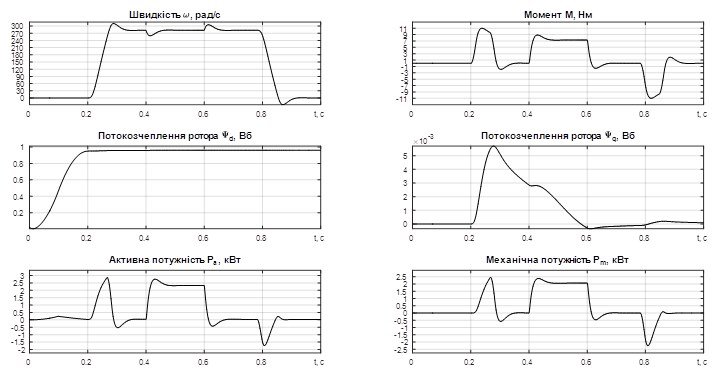
Рисунок 4.7 – Графік перехідних процесів при моделювання прямого векторного керування з номінальною швидкістю при відсутності 1-ї і 2-ї похідних за швидкістю
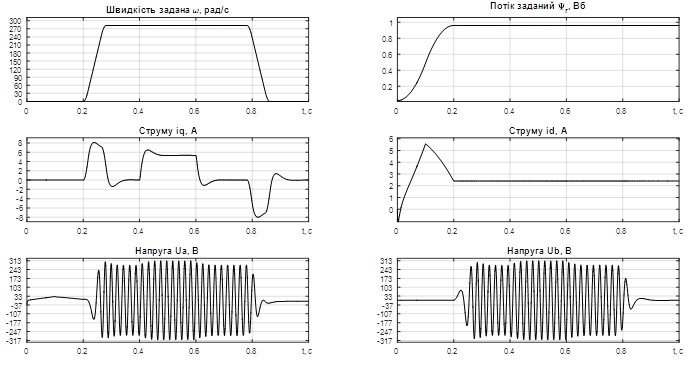
Рисунок 4.8 – Графік перехідних процесів при моделювання прямого векторного керування з номінальною швидкістю при відсутності 1-ї і 2-ї похідних за швидкістю
Бачимо, що при відсутності 1-ї і 2-ї похідних за швидкістю, в системі має місце полеорієнтування, але ми отримуємо неасимптотичне відпрацювання швидкості, це можна побачити з графіків вище, і видно, що маємо перерегулювання при розгоні і при гальмування, чого не було при наявності похідних. Струм iq, відображає поведінку моменту з отриманого можна заключити, що відпрацювання моменту при розгоні і гальмуванні також не відбувається.
І останній дослід виконаємо для дослідження робастності. Оскільки будемо вважати, що система не буде входити у зону насичення і ми будемо працювати на лінійній ділянці кривої намагнічування, то можна вважати, що власні індуктивності ротора і статора, а також взаємоіндуктивність будуть залишатися незмінними. Виходячи з цього можна сказати, що найбільший вплив на роботу двигуна, який відпрацьовує задану траєкторію руху, буде справляти зміна параметрів активного опору ротора і статора. Оскільки статор має кращі умови охолодження, тому активний опір статора вважають менш впливовим, а ніж активний опір ротора.
Тому введемо наступні варіації:
 ;
; 
Побудуємо перехідні процеси для основних величин, та проаналізуємо як впливає кожна варіація на моделювання процесів.
При ![]() , видно що вектор потокозчеплення зорієнтований, але бачимо невелике збільшення напруги, яке перевищує допустиме значення яке може видавати інвертор і це при швидкості
, видно що вектор потокозчеплення зорієнтований, але бачимо невелике збільшення напруги, яке перевищує допустиме значення яке може видавати інвертор і це при швидкості ![]() , яка повинна забезпечувати межу при відсутності варіації значення напруги на виході інвертора. Ззбільшення напруги призводить до збільшення струму і як видно з графіків, при такій варіації момент який створюється при розгоні більший за номінальний, тому для створення цього моменту і відбувається збільшення струму.
, яка повинна забезпечувати межу при відсутності варіації значення напруги на виході інвертора. Ззбільшення напруги призводить до збільшення струму і як видно з графіків, при такій варіації момент який створюється при розгоні більший за номінальний, тому для створення цього моменту і відбувається збільшення струму.
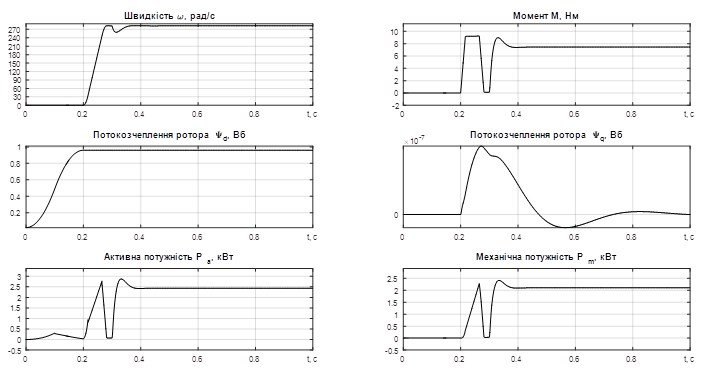 Рисунок 4.9 – Графіки перехідних процесів при
Рисунок 4.9 – Графіки перехідних процесів при ![]()
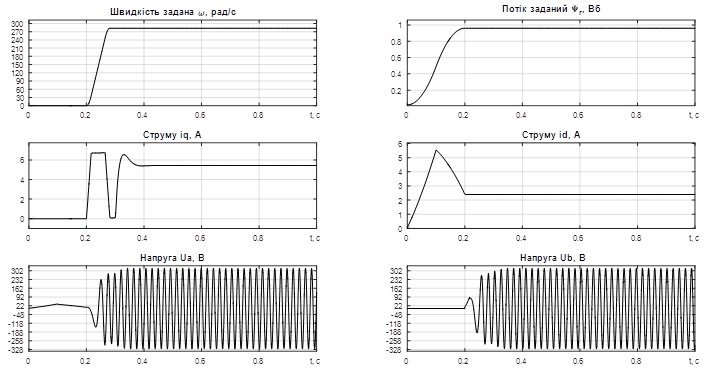
Рисунок 4.10 – Графіки перехідних процесів при ![]()
При варіації ![]() , ми аналогічну картину як і у попередньому випадку, але бачимо, що напруга не виходить за свої межі, тому можна сказати, що ця варіація сприймається легше, а ніж передня.
, ми аналогічну картину як і у попередньому випадку, але бачимо, що напруга не виходить за свої межі, тому можна сказати, що ця варіація сприймається легше, а ніж передня.
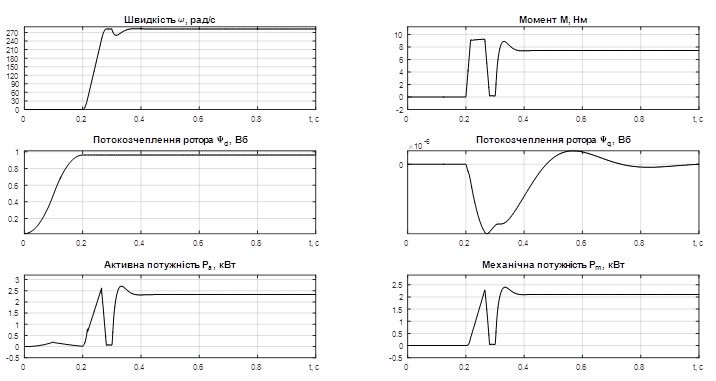
Рисунок 4.11 – Графіки перехідних процесів при![]()
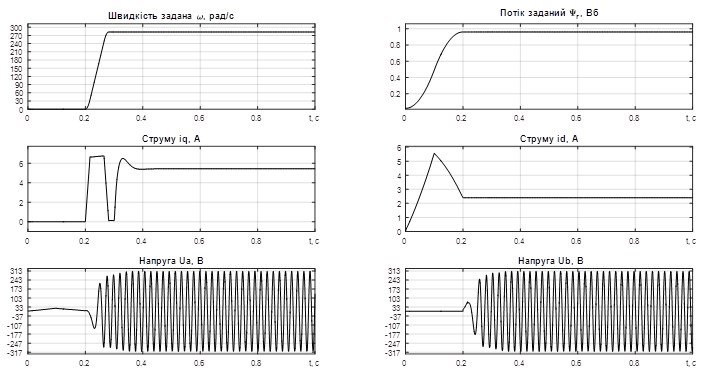
Рисунок 4.12 – Графіки перехідних процесів при ![]()
При варіації ротора ![]() , видно значне погіршення перехідних процесів, при накиданні моменту немає асимптотичного відпрацювання швидкості, бачимо, як поводить себе момент вектор потокозчеплення незорієнтован, що можна побачити з графіків залежності нижче. Виріс струм iq, а потокозчеплення постійно коливається.
, видно значне погіршення перехідних процесів, при накиданні моменту немає асимптотичного відпрацювання швидкості, бачимо, як поводить себе момент вектор потокозчеплення незорієнтован, що можна побачити з графіків залежності нижче. Виріс струм iq, а потокозчеплення постійно коливається.
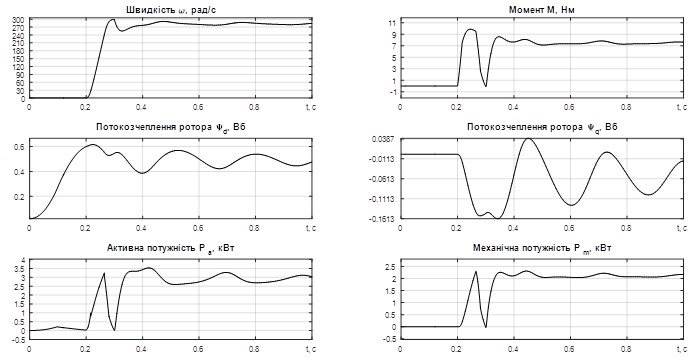 Рисунок 4.13 - Графіки перехідних процесів при
Рисунок 4.13 - Графіки перехідних процесів при ![]()
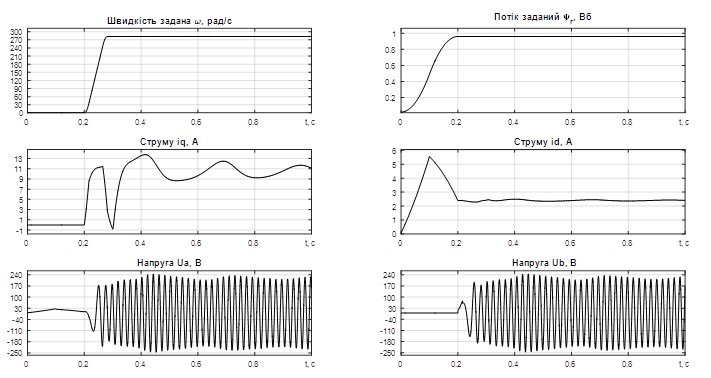
Рисунок 4.14 - Графіки перехідних процесів при ![]()
При варіації ротора ![]() , маємо взагалі нерільні процеси, які не можуть відповідати практичній реалізації. Видно, що порушено орієнтування вектора потокозчеплення і значення потоку виросло до 1.2, що є неможливим справжньому житті, згідно обмеження потоку значенням одиниці. Тому усі процеси як майже подвійне зростання номінальної напруги, можна не розглядати за наявності попередніх зауважень.
, маємо взагалі нерільні процеси, які не можуть відповідати практичній реалізації. Видно, що порушено орієнтування вектора потокозчеплення і значення потоку виросло до 1.2, що є неможливим справжньому житті, згідно обмеження потоку значенням одиниці. Тому усі процеси як майже подвійне зростання номінальної напруги, можна не розглядати за наявності попередніх зауважень.
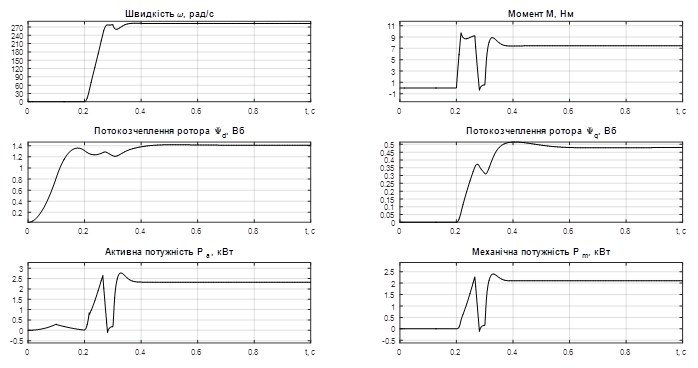
Рисунок 4.15 - Графіки перехідних процесів при ![]()
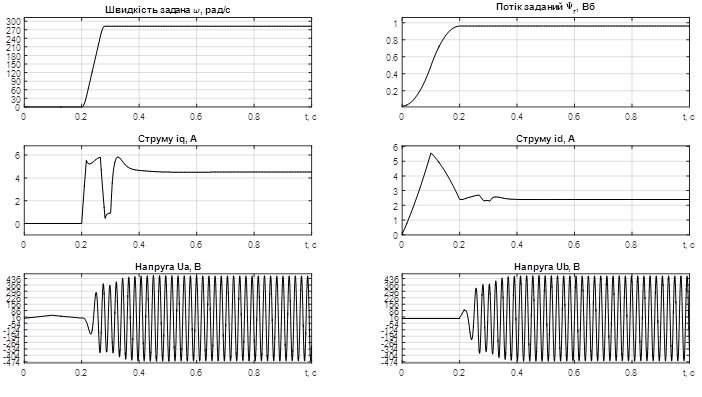
Рисунок 4.16 - Графіки перехідних процесів при ![]()
Побудуємо основні графіки залежності варіації активного опора ротора, так як це є найкритичніша варіація від: активної потужності, ккд, струму iq. При чому будемо змінювати значення номінального моменту, тому візьмемо діапазон зміни моменту у діапазоні ![]() ,
, ![]() ,
, ![]() .
.

|
|
|
|
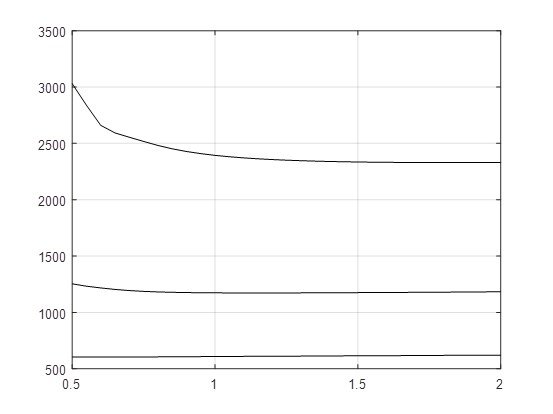
Рисунок 4.17 – Графік залежності активної потужності від зміни варіації опора ротора
З графіка отриманого вище, можна заключити, що він не відповідає дійсності, так як моделювання показує, що при варіації опора ротора від 1 до 0,5, збільшується активна потужність, що неяким чином не може відповідати дійсності. Наочно це видно по графікам перехідних процесів з варіацією, та без неї.
|
|
|
|
|
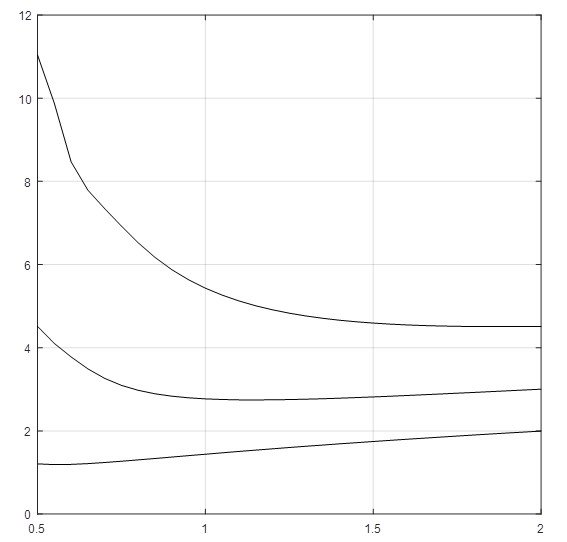
Рисунок 4.18 – Графік залежності Iq від зміни варіації опора ротора
|
|
|
|
|
|
|
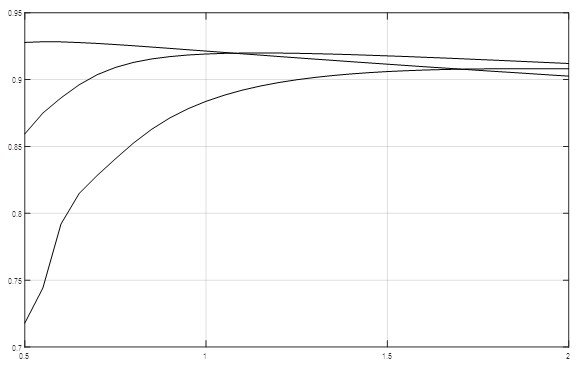
Рисунок 4.19 – Графік залежності ККД від зміни варіації опора ротора
З отриманих вище графіків видно, що варіація опору не найкращим шляхом впливає на перехідні процеси у системі. Система прямого векторного керування, без компенсації зобастості є чутливою, до зміни опору, особливо ротора, у наслідок чого система не тільки може втрачати полеорієнтування, але і взагалі можуть бути такі випадки коли система не буде працювати.
Похожие работы
... або телефонного паперу змазати клеєм БФ-2. Поверхня ізоляції шпильки покрити ізоляційним лаком БТ-99 і просушити на повітрі протягом 3 годин. Розділ 4. Технічне обслуговування й ремонт електричних машин 4.1 Обсяг робіт по технічному обслуговуванню й ремонту Найважливішою умовою правильної експлуатації електричних машин є своєчасне проведення планово-попереджувальних ремонтів і періодичних ...
0 комментариев