Содержание:
Введение
1. Передаточные механизмы.
2. Передняя опора (шасси самолёта ТУ-4)
Литература
Введение
КУЛИСА (франц . coulisse), звено кулисного механизма, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном (ползуном) поступательную пару. По виду движения различают кулисы вращающиеся, качающиеся, прямолинейно движущиеся.
КУЛИСНЫЙ МЕХАНИЗМ , рычажный механизм, в состав которого входит кулиса.
Кулисный механизм, шарнирный механизм, в котором два подвижных звена - кулиса и кулисный камень - связаны между собой поступательной (иногда вращательной при дуговой кулисе) кинематической парой.
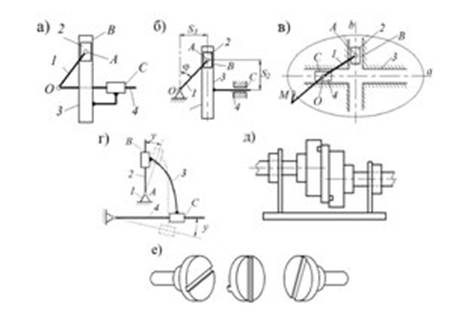
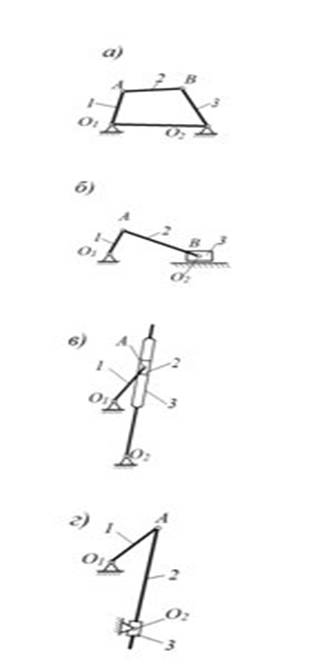
Наиболее распространённые плоские четырёхзвенные кулисные механизмы в зависимости от типа третьего подвижного звена делятся на группы: кривошипно-кулисные, кулисно-коромысловые, кулисно-ползунные, двухкулисные. Кривошипно-кулисные механизмы могут иметь вращающуюся, качающуюся или поступательно-движущуюся кулису. Кулисно-коромысловые механизмы, получающиеся из предыдущих при ограничении угла поворота кривошипа, выполняют с качающейся (рис. 1, а) и поступательно-движущейся (рис. 1, б) кулисой,
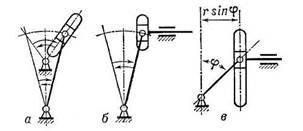
Рис.1.
применяют для преобразования движения, а также в качестве т. н. синусных механизмов (рис. 1, в) счётно-решающих машин. Кулисно-ползунные механизмы предназначаются для преобразования качательного движения в поступательное или наоборот, а также используются в качестве тангенсного механизма в счётно-решающих машинах. В машинах находят применение двухкулисные механизмы (рис. 2),
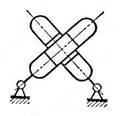
Рис.2.
обеспечивающие равенство угловых скоростей кулис при постоянном угле между ними. Это свойство используют, например, в муфтах, допускающих смещение осей соединяемых валов. Сложные многозвенные кулисные механизмы применяют для различных целей, например в системах регулирования наполнения цилиндров двигателей внутреннего сгорания, реверсивных механизмах паровых машин и др.
1.Передаточные механизмы
К передаточным относятся планетарный и кривошипношатунный механизмы. Эти механизмы позволяют осуществлять сложное движение.
В планетарном механизме вращательное движение превращается в планетарное, при котором деталь вращается вокруг своей оси и одновременно вокруг другой оси (например, так движутся планеты в пространстве — отсюда и название механизма).
Планетарный механизм (рис. 1.а) состоит из двух зубчатых колес: ведущего 1, которое называется солнечным, и ведомого 4, которое называется сателлит (их может быть несколько). Необходимыми условиями работы данного механизма являются жесткое соединение этих колес с помощью рычага — водила 2, который придает движение сателлиту, и неподвижность солнечному колесу 3. Планетарный механизм может быть выполнен на базе двух передач: зубчатой (а, б) с наружным или внутренним зацеплением или цепной (в). На базе цепной передачи можно передавать планетарное движение на большее расстояние, чем на базе зубчатой.
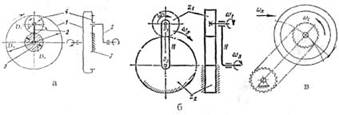
Рис. 2. Планетарные механизмы
Кривошипно-шатунный (кривошипно-ползунный, кривошипно-кулисный) механизм служит для превращения вращательного движения в возвратно-поступательное (рис. 2.). Механизм состоит из ведущего органа кривошипа 1, который на валу совершает вращательное движение, и шатуна 2, ползуна 3 (б) или кулисы, которые совершают возвратно-поступательное движение. Шатун соединятся с помощью пальца 4 с рабочим органом — поршнем 3 (а). На рис. 2.б дан вариант кривошипно-ползунного механизма, например, в овощерезках.
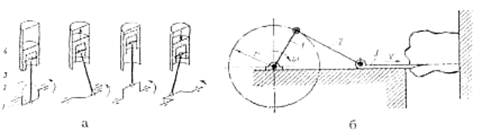
Рис. 3. Кривошипно-шатунный и кривошипно-ползунный механизмы
2. Передняя опора (шасси самолёта ТУ-4)
Опора располагается в носовой части фюзеляжа. Ниша опоры ограничена сверху полом кабины экипажа, по бокам продольными балками в виде сплошных стенок с поясами по верху и низу, спереди и сзади ниша зашита сплошными стенками усиленных шпангоутов. Снизу ниша закрывается двумя боковыми створками, шарнирно подвешенными к продольным балкам.
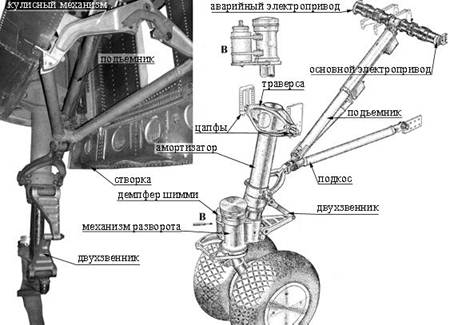
Рис.5.
Стойка передней опоры состоит из амортизатора, в верхней части которого приварена траверса с двумя цилиндрическими цапфами по бокам. С помощью этих цапф стойка подвешивается шарнирно к двум узлам, установленным на боковых балках ниши (Рис.6)
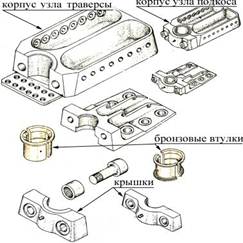
Рис.6.
Узлы разъемные и снабжены бронзовыми втулками, к которым подается смазка от масленок. Цапфы входят в эти втулки и прижимаются к корпусу узла крышками на болтах. На нижнем конце штока амортизатора жестко закреплен корпус механизма разворота колес. Внутри корпуса на роликовом подшипнике и бронзовом подпятнике вращается шпиндель, к которому снизу с помощью наклонной трубы присоединяются оси колес (Рис.7.)
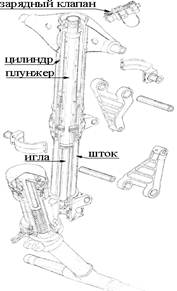
Рис.7.
Колеса своими подшипниками устанавливаются на эти оси и закрепляются слева и справа затяжными гайками с последующей контровкой шплинтами. При действии на колеса боковых нагрузок шпиндель поворачивается в корпусе механизма в пределах углов, ограниченных упорами на корпусе. Разворот самолета на земле обеспечивается дифференциальным торможением колес главных опор и свободным ориентированием по направлению движения колес передней опоры.
На шпинделе спереди закреплен кронштейн, от которого специальной тягой движение разворота колес передается на гидравлический демпфер шимми. Демпфер лопаточного типа закреплен болтами на корпусе механизма разворота (Рис.8.)
Тяга шпинделя через рычаг вращает валик с подвижными лопатками и перегоняет жидкость из одной полости в другую. Сопротивление жидкости предотвращает развитие автоколебаний типа шимми.
Для установки колес в нейтральное положение после отрыва самолета от земли внутри шпинделя смонтирован пружинно-роликовый механизм установки колес по полету. Он состоит из качалки, шарнирно закрепленной в верхней части шпинделя. На внешнем конце качалки установлен ролик, а внутренней ее конец с помощью вертикального стержня давит на пружину, закрепленную в шпинделе и имеющую предварительную затяжку порядка 4000 Н (Рис.9.)
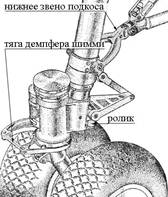

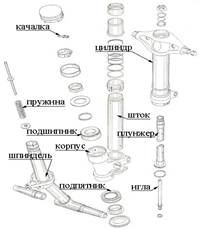
Рис.7. Рис.8. Рис.9.
При развороте колес шпиндель перемещает качалку с роликом по окружности вперед или назад, заставляя ролик перекатываться по профилированной цилиндрической поверхности, которая закреплена на корпусе механизма разворота. Профиль выполнен таким образом, что любой разворот колес от нейтрального положения перемещает ролик вверх и, сжимая пружину, увеличивает усилие на ролик. В таком отклоненном от нейтрали положении ролик может удерживаться только боковыми нагрузками на колесах. После отрыва самолета от земли эти нагрузки на колесах исчезают и усилие пружины заставляет ролик скатываться в нижнюю точку профиля, устанавливая колеса в нейтральное положение строго по полету.
Амортизатор стойки жидкостно-газовый плунжерного типа с иглой. Цилиндр и шток амортизатора связаны между собой двухзвенником, исключающим разворот штока в цилиндре.
В выпущенном положении стойка удерживается задним складывающимся подкосом. Нижнее звено подкоса выполнено в виде штампованной вилки, которая крепится к цапфам на муфте цилиндра. Верхнее звено подкоса представляет собой сварную трубчатую раму, которая своими цапфами крепится к двум узлам на боковых стенках ниши
Между собой верхнее и нижнее звенья подкоса связаны пространственным шарниром, состоящим из серьги и двух взаимно перпендикулярных болтов (Рис.10.) Все цапфы подкоса снабжены бронзовыми втулками и смазкой от масленок. К верхнему звену подкоса присоединен винтовой подъемник, второй конец которого связан с редуктором (Рис.11.)
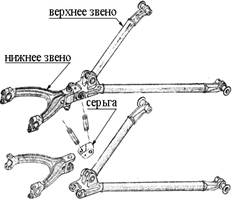
Рис.10.

Рис.11.
Коническая шестерня редуктора получает вращение от двух независимых электроприводов, один из которых питается от аварийной сети. Вращение шестерен редуктора передается на стальной винт, на котором установлена бронзовая гайка (Рис.12.)
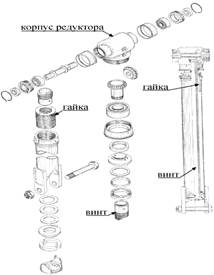
Рис.12.
Перемещение гайки вдоль оси винта стальной трубой с вильчатым наконечником, присоединенным к подкосу поворачивает его верхнее звено вверх при уборке и вниз при выпуске стойки. На корпусе подъемника установлены два блока концевых выключателей, которые выключаю привод в крайних положениях стойки и обеспечивают ее надежную фиксацию за счет самоторможения винтовой пары (Рис.13.)
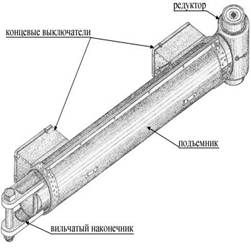
Рис.13.
Створки ниши открываются при выпуске и закрываются при уборке стойки. В выпущенном положении створки фиксируются кулисным механизмом, состоящим из двух шарнирно связанных между собой рычагов, концы которых присоединены к створками. В открытом положении створок рычаги запираются подпружиненным стопором, не позволяющим рычагам складываться (Рис.14.)
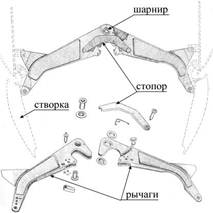
Рис.14.
В нижней части штока амортизатора закреплен цилиндрический кулачек. В конце уборки стойки кулачек нажимает на стопор кулисного механизма и отпирает его. При дальнейшем движении стойки кулачек заставляет рычаги складываться и поворачивает створки на закрытие. В убранном положении стойки кулачек через рычаги прижимает створки к окантовке ниши и удерживает их в закрытом положении.
Литература:
1. Артоболевский И. И., Механизмы в современной технике, т, 1—2, М., 1970
2. Кожевников С. Н., Есипенко Я. И., Раскин Я. М., Механизмы, 3 изд., М., 1965;
3. Мелик-Степанян А. М., Проворнов С. М., Детали и механизмы, М., 1959
Похожие работы
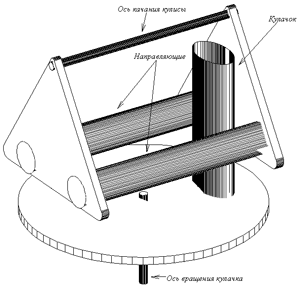
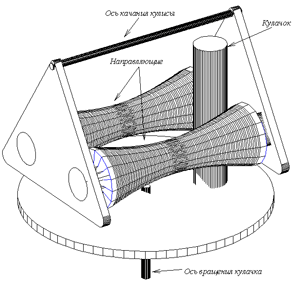
... движения при любом изменении положения самой конструкции за счет постоянного касания кулачка с каждой направляющей в одной точке. При этом не требуется использования дополнительных деталей, например подшипников, что позволяет без проблем изготовить подобные кулисно-рычажные механизмы малых размеров. Это дало возможность использования описанного механизма, в частности, в серийном производстве ...
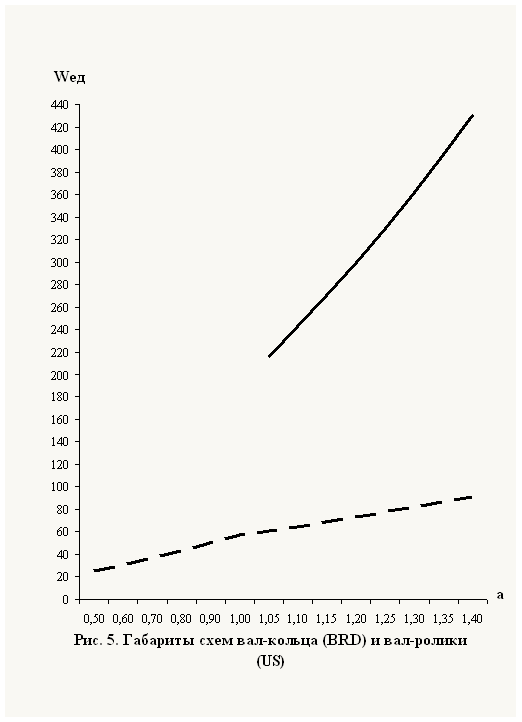
... механизмов, результаты вычисления сводим в табл. 1 и строим графики на рис. 5. Таблица 1. Вычисление габаритов схем валикокольцевых механизмов (ВКМ) a 0,50 0,60 0,70 0,80 0,90 1,00 1,05 1,10 1,15 1,20 1,25 1,30 1,35 1,40 - - - - - - 216,72 242,88 270,48 299,52 330 361,92 395,28 430,08 25,12 ...

... приведены только частоты их вращения, то изображенные внутри корпуса передачи являются одним из вариантов синтеза редуктора. Рис. 2.6. Синтез механизма 7. Эксплуатационные свойства машин и механизмов 1. Надежность машин и механизмов как важнейшее эксплуатационное свойство. Под надежностью понимают свойство изделия выполнять заданные функции, сохраняя свои эксплуатационные показатели в ...
... об отклонении фрезы от заданной программы обработки; регуляторы, реагирующие на отклонение угловой скорости главного вала машины и устанавливающие нормальную заданную угловую скорость этого вала и т.д. К этим же механизмам относятся и измерительные механизмы по контролю размеров, давления, уровней жидкостей и т.д. К механизмам подачи, транспортировки, питания и сортировки обрабатываемых сред и ...
0 комментариев