ВВЕДЕНИЕ
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического управления и регулирования, в быту. Они преобразуют механическую энергию в электрическую (генераторы) и, наоборот, электрическую энергию в механическую.
Любая электрическая машина может использоваться как генератор, так и двигатель. Это её свойство называется обратимостью. Она может быть также использована для преобразования одного рода тока в другой (частоты, числа фаз переменного тока, напряжения) в энергию другого вида тока. Такие машины называются преобразователями.
Электрические машины в зависимости от рода тока электрической установки, в которой они должны работать, делятся на машины постоянного тока и машины переменного тока. Машины переменного тока могут быть как однофазными, так и многофазными. Наиболее широкое применение получили асинхронные двигатели и синхронные двигатели и генераторы.
Принцип действия электрических машин основан на использовании законов электромагнитной индукции и электромагнитных сил.
Электрические двигатели, используемые в промышленности, быту выпускают сериями, которые представляют собой ряд электрических машин возрастающей мощности, имеющих однотипную конструкцию и удовлетворяющих общему комплексу требований. Широко применяются серии специального назначения.
Общие сведения об электрических двигателях
. Классификация электрических двигателей
Электрический двигатель --- машина, предназначенная для преобразования электрической энергии в механическую.
Электрические двигатели классифицируют:
По принципу действия электрические двигатели различают:
Переменного тока (асинхронные, синхронные)
Постоянного тока (с независимым, параллельным, последовательным и смешанным возбуждением).
По форме исполнения электрические двигатели делят на 9 групп. Наиболее распространенны следующие типы:
На лапах с подшипниковыми щитами, горизонтальным валом (рис.1)
[pic]Рис.1
На лапах с подшипниковыми щитами, фланцем на подшипниковом щите, вертикальным валом (рис.2)
[pic]Рис.2
Без лап с подшипниковыми щитами, фланцем на одном подшипниковом щите
(рис.3)
[pic]Рис.3
По степени защиты от соприкосновения с токоведущими частями и попадания во внутрь посторонних тел, пыли, влаги выполняют различные модификации:
- Открытые электрические машины выполнены без специальных приспособлений для предохранения от случайного соприкосновения с вращающимися и токоведущими частями, она также не имеет специальных приспособлений для предотвращения попадания внутрь машины посторонних предметов. Их устанавливают только в машинных залах.
- Закрытые электрические машины снабжены специальными приспособлениями при помощи, которых корпус машины отделяется от окружающей среды, но не настолько плотно, чтобы считать её герметической.
Предназначается для использования в пыльных помещениях и на открытом воздухе.
- Защищенная электрическая машина снабжена специальными приспособлениями для предохранения от случайного прикосновения к её вращающимся и токоведущим частям, а также для предотвращения попадания внутрь машины посторонних предметов. Предназначается для установки в закрытых помещениях.
- Каплезащищенная электрическая машина снабжена приспособлениями для предохранения её внутренних частей от попадания капель влаги, падающих отвесно.
- Брызгозащищенные электрические машины снабжены приспособлениями для предохранения от попадания внутрь её брызг, падающих под углом до 45 градусов к вертикали с любой стороны.
- Водозащищённые электрические двигатели выполнены таким образом, что при обливании их вода не проникает внутрь машины.
- Взрывобезопасная машина выполнена таким образом, что она может противостоять взрыву внутри неё газов, которые могут там накопиться, и не допускать воспламенения взрывчатых или горючих газов содержащихся в окружающей среде при искрении внутри машины. Предназначается для установки на угольных шахтах и некоторых химических заводах.
- Герметическая электрическая машина выполнена таким образом, что все отверстия её закрыты настолько плотно, что при определенном наружном давлении исключается всякое сообщение между внутренним пространством машины и окружающей средой.
По способу охлаждения электрические машины классифицируют: - Естественно охлаждаемая электрическая машина не имеет приспособлений для усиления охлаждения. Этот тип охлаждения обычно применяется в машинах открытого типа. - Вентилируемая машина снабжена специальными приспособлениями для усиления охлаждения. - Электрическая машина с самовентиляцией оснащена вентилирующими приспособлениями на её вращающейся части. - Электрическая машина с независимой вентиляцией имеет вентиляционные устройства, не связанные с вращающейся частью машины. - Электрическая машина с проточной вентиляцией охлаждается воздухом внешней среды. - Продуваемая электрическая машина снабжена вентиляционными устройствами, прогоняющими воздух через внутренние части машины. - Обдуваемая электрическая машина снабжена для охлаждения вентиляционными устройствами, обдувающими наружные части машины. По номинальным режимам работы выделяют три основных режима работы. - Продолжительный режим – электрический двигатель работает при постоянной нагрузке R,н. При этом за время работы температура всех частей двигателя достигает установившегося значения t,уст. (График 1)
[pic]
Кратковременный режим --- периоды неизменной номинальной нагрузки чередуются с периодами отключения двигателя. За время работы под нагрузкой двигатель не успевает нагреться до установившейся температуры, а за время остановки охладиться до температуры окружающей среды. Различают двигатели с длительностью включения 10, 30, 60 и 90 минут. (График 2)
[pic] - Повторно-кратковременный режим --- кратковременные периоды t,p неизменной номинальной нагрузки чередуются с периодами t,n отключения электрического двигателя. За время работы электрический двигатель не успевает нагреться до установившейся температуры, а за время паузы не успевает охладиться до температуры окружающей среды. (График 3)
[pic]
Повторно-кратковременный режим характеризуется относительной продолжительностью включения
[pic] где t,p -- время работы при номинальной нагрузке t,n -- время отключения электрического двигателя
Предусмотрены следующие номинальные повторно- кратковременные режимы: 15, 25, 40 и 60%.
. Устройство электрических двигателей
. Двигатели постоянного тока
Электрические машины постоянного тока, как и какие-либо другие электрические машины – это электромеханические преобразователи энергии. Машины постоянного тока способны работать и как в режиме электрического двигателя, так и в режиме генератора постоянного тока. Двигатели постоянного тока используются гораздо чаще, чем генераторы постоянного тока. Это объясняется важными преимуществами этих двигателей. Возможностью плавно, простыми способами и в широких пределах регулировать частоту вращения. Значительным пусковым моментом и одновременно незначительным пусковым током. Способностью к перегрузкам.
Приведенные позитивные качества двигателей постоянного тока обуславливает широкое их применение в системах автоматического управления, автомобильном, железнодорожном, морском транспорте, городском транспорте и т. д.
Кроме позитивных качеств у таких двигателей есть также негативные качества. Самым главным недостатком является присутствие в конструкции ненадежного узла – «щетко-коллекторного» механизма, искрение которого под нагрузкой делает невозможной эксплуатацию этих двигателей во взрывоопасных помещениях. Этот главный недостаток уменьшает область применения электрических двигателей постоянного тока. Сложная технология изготовления, необходимость особенного ухода за машиной также весомые недостатки.
Производство и широкое применение мощных силовых транзисторов и тиристоров для изготовления специальных источников электрической энергии с переменной частотой и напряжением, предназначенных для питания и частотного управления скоростью вращения асинхронного двигателя, приводит к вытеснению ними двигателей постоянного тока из областей их традиционного применения.
В последнее время созданы и успешно применяются двигатели постоянного тока, в которых механический коллектор заменен бесконтактным коммутатором на полупроводниковых элементах.
. Строение машин постоянного тока
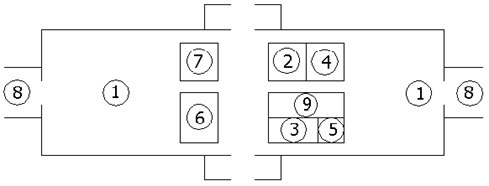
Конструктивно машина постоянного тока состоит из неподвижного статора и подвижного ротора, разделенных между собой воздушным зазором. (Рис.4)
Статор состоит из станины, к которой прикреплены сердечники основных и дополнительных полюсов. На этих сердечниках размещены катушки обмотки возбуждения и обмотки дополнительных полюсов. Станина, а также сердечники основных и дополнительных полюсов являются частью магнитопровода. Обмотка возбуждения образует магнитодвижущую силу (МДС) возбуждения и соответственно основной магнитный поток. Обмотка дополнительных полюсов образует МДС для компенсации реакции якоря и облегчает условия коммутации (устраняет искрение на скользящих контактах «щетка-коллектор»).
Сердечники основных полюсов или их наконечники, изготавливают шихтованными (из стальных штампованных листов), а дополнительные массивными или также шихтованными. Это делается с целью уменьшения потерь мощности от вихревых токов, которые наводятся в основных полюсах из-за пульсаций магнитного потока во время вращения якоря.
Полюса крепятся к станине с помощью болтов. Катушки основных и дополнительных полюсов изготавливают из изолированного медного провода круглого или прямоугольного сечения. Кроме приведенных выше обмоток, в наконечниках основных полюсов, машин постоянного тока со сложными условиями коммутации (прокатные двигатели, специального назначения и др.), размещают компенсационную обмотку, которая подключается последовательно с обмоткой якоря так, чтобы магнитный поток от неё был направленным навстречу потоку от тока якоря и полностью компенсировал бы его реакцию.
Якорь крепится на валу, состоит из сердечника (который является частью магнитопровода машины), обмотки и коллектора. Сердечник якоря, который перемагничивается с частотой f , собирают из листов электротехнической стали. В пазы сердечника вкладывают секции обмотки якоря. В каждом пазу уложено две части разных секций обмоток, одна поверх другой. Концы обмоток припаивают к соответствующим пластинам коллектора. Секции могут быть одновитковыми и многовитковыми. Якорь соединен со статором с помощью подшипниковых щитов, а на якоре закрепляются подшипники. Выводы от обмоток возбуждения и якорной группы размещают в клемной коробке. Вся машина крепится к фундаменту с помощью лап. Для охлаждения машины предусмотрены вентиляционные каналы.
Особым конструкционным компонентом электрических машин постоянного тока является коллектор. В основном коллектор изготавливают виде цилиндра, который собран из пластин из твердой меди. Между пластинами размещены изоляционные прокладки из миканита. Над коллектором устанавливают щетки, которые размещаются в щеткодержателях, укрепленных на подшипниковом щите с помощью траверсы. Щетки прижимаются к коллектору с помощью пружин, прижим которых можно регулировать.
[pic]
[pic]
Рис.4 Устройство электрического двигателя постоянного тока:
1 – щеткодержатель
2 – щетки
3 – коллектор
4 – якорь
5 – станина
6 – обмотка якоря
7 – сердечник дополнительного полюса
8, 9 – катушка и сердечник главного полюса
. Принцип действия электрического двигателя постоянного тока
Если обмотку возбуждения подключить к источнику электрической энергии, то по обмотке возбуждения будет протекать электрический ток. Под действием этого тока будет образовываться основное магнитное поле электрической машины. С помощью основных полюсов, в частности наконечников этих полюсов, формируется равномерное распределение индукции по дуге цилиндрической поверхности ротора. Обмотка возбуждения вместе с магнитопроводами статора и ротора называется индуктором, т.е. той частью машины, которая образует основное магнитное поле.
В результате взаимодействия магнитного поля обмоток якоря и магнитного поля полюсов создается вращающий момент и якорь машины приходит во вращение. Т.о. электрическая энергия преобразовывается в механическую энергию. Момент развиваемый электрическим двигателем вычисляется по формуле:
M=k(( где, M развиваемый момент электрическим двигателем
. магнитный поток эл.дв., Вб.
. ток обмотки якоря, А k конструктивная постоянная машины
При вращении якоря в проводниках его обмотки индуцируется ЭДС, направление которой противоположно направлению тока, поэтому её называют противо-ЭДС или обратной ЭДС. Эта ЭДС играет роль регулятора потребляемой мощности, т.е. изменение потребляемого тока происходит вследствие изменения противо- ЭДС. Приложенное напряжение уравновешивается противо-ЭДС, падением напряжения в обмотке якоря и щеточных контактах. Следовательно:
U=E+IRя Ток в обмотке якоря и частота его вращения определяются по формулам:
I= (U-E)/Rя и, n= (U-IRя)/ (с() где, с постоянная, определяется конструкцией машины. Условием установившегося режима двигателя является равенство вращающего и тормозного момента. Если вращающий момент, развиваемый двигателем Мэ, уравновешен тормозным моментом Мт, то частота вращения якоря остается постоянной. При нарушении равновесия моментов появляется дополнительный момент, создающий положительное или отрицательное ускорение вращения якоря. Если увеличить нагрузку (тормозной момент на валу двигателя Мт) то равновесие моментов нарушится (МэМэ), то частота вращения уменьшается непрерывно до остановки двигателя. Такие случаи могут возникать при больших тормозных моментах на валу и значительных понижениях напряжения в сети. При уменьшении нагрузки на валу двигателя (Мэ>Мт) вращение якоря начнет ускоряться, что вызовет увеличение противо-ЭДС в его обмотке. Ток в обмотке якоря уменьшится и снизится вращающий момент двигателя. Изменение частоты, противо-ЭДС и тока в якоре будет протекать также до восстановления равновесия моментов (Мэ=Мт). Однако в электрических двигателях постоянного тока сравнительно часто создаются условия, при которых равновесие моментов не восстанавливается при любом изменении частоты, так что вращающий момент всегда остается больше тормозного момента на валу двигателя (Мэ>Мт). В таких случаях частота вращения якоря непрерывно увеличивается, теоретически стремясь к бесконечности. Практически при значительном превышении номинальной частоты машина разрушается --- разрываются бандажи, скрепляющие лобовые соединения обмотки, проводники обмотки выходят из пазов и т.д. Такой аварийный режим называется разносом двигателя. Направление вращения якоря эл.двигателя постоянного тока зависит от полярности полюсов и от направления тока в проводниках обмотки якоря. Т.о. для реверсирования двигателя, т.е. для изменения направления вращения якоря, нужно либо изменить полярность полюсов, переключив обмотку возбуждения, либо изменить направление тока в обмотке якоря. Обмотка возбуждения обладает значительной индуктивностью и переключение ее нежелательно. Поэтому реверсирование двигателей постоянного тока обычно производится переключением обмотки якоря.
. Магнитное поле электрических машин постоянного тока
Магнитное поле электрических машин постоянного тока состоит из двух частей: основного магнитного поля и магнитного поля якоря. Ток Iв, который протекает по обмотке возбуждения с числом витков (в, образует магнитодвижущую силу (МДС) обмотки В.
Fв=Iв(в Под действием магнитодвижущей силы образуется магнитный поток Фо основного магнитного поля, который замыкается через основные полюса, магнитопровод статора и ротора и дважды пересекает воздушный зазор. Магнитный поток Фо основного поля вычисляют по закону Ома для магнитной цепи:
[pic]
где, Rб – воздушные зазоры, Rп – основные полюса, Rс – сопротивление статора, Rр – сопротивление ротора. Fп – магнитодвижущая сила обмотки одного полюса, которая связана с МДС возбуждения зависимостью:
Fв=2Fп Чтобы уменьшить пульсацию, необходимо распределить индукцию основного магнитного поля в воздушном зазоре как можно равномернее. Это достигается путем выбора формы наконечника основного полюса. Магнитное поле якоря возбуждает проводники с током обмотки якоря, распределение которых вдоль дуги поверхности ротора равномерное. Влияние магнитного поля якоря на основное магнитное поле машины называется реакцией якоря. Реакция якоря имеет негативное влияние на работу машины постоянного тока: искажается равномерное распределение магнитной индукции вдоль дуги зазора вследствие насыщения магнитопровода уменьшается основной магнитный поток Чтобы уменьшить негативное влияние реакции якоря, применяют: -- компенсационную обмотку. Компенсационная обмотка включается последовательно с обмоткой якоря, пропуская по ней ток якоря. Магнитный поток якоря и компенсационной обмотки возбуждаются одним и тем же током и направлены встречно. Таким образом происходит компенсация негативного влияния реакции якоря.
- дополнительные полюса. Обмотку дополнительного полюса включают последовательно с обмоткой якоря, поэтому магнитное дополнительных полюсов зависит от тока якоря. Дополнительные полюса размещают так, чтобы магнитное поле якоря и дополнительных полюсов были противоположными друг другу и таким образом компенсировалось влияние реакции якоря.
. Электромагнитный момент машины постоянного тока
Сила Ампера – это взаимодействие, а также сила взаимодействия любого магнитного поля на проводник с током.
На каждый проводник длинной L обмотки якоря с током Iа, который находится в магнитном поле с индукцией В, действует сила Ампера, значение которой равняется:
Fi=BIaL Направление силы Ампера определяется по правилу левой руки. Момент силы Ампера одного проводника, который лежит в пазу ротора диаметром D, равняется:
M=NM1=NBIaL(D/2)
Преобразуя формулу можно получить:
М=СмФоIя где, Фо -- магнитный поток Iя -- поток якоря См -- конструктивная постоянная двигателя, которая вычисляется по формуле
См=рN/2(a Ток якоря вычисляется:
[pic] Ея – электродвижущая сила якоря Rя – сопротивление обмотки якоря– приложенное напряжение
. Способы возбуждения основного магнитного поля машин постоянного тока
Основное магнитное поле машины образуется током в обмотке возбуждения. В зависимости от того как включается обмотка, различают такие способы возбуждения (Рис.5): независимое, в котором обмотка возбуждения питается от независимого источника питания (рисунок А); параллельное, в котором обмотка возбуждения включается параллельно обмотке якоря (рисунок Б); последовательное, в котором обмотка возбуждения и обмотка якоря включены последовательно (рисунок В); смешанное, с параллельной и последовательной обмоткой возбуждения (рисунок Г);
[pic] Рис.5
Кроме того, электрические машины постоянного тока могут возбуждаться постоянными магнитами. Начала и концы обмоток возбуждения, согласно стандартам, обозначаются так: обмотка якоря –Я1;Я2 обмотка дополнительных полюсов – Д1;Д2 компенсационная обмотка – К1;К2 обмотка возбуждения независимая – М1;М2 обмотка возбуждения параллельная –Ш1;Ш2 обмотка возбуждения последовательная – С1;С2
. Потери и кпд машин постоянного тока
В машинах постоянного тока при работе происходят потери энергии, которые складываются из трех составляющих.
Первой составляющей являются потери в стали Рст на гистерезис и на вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На её перемагничивание затрачивается мощность, называемая потерями на гистерезис. Одновременно при вращение якоря в магнитном поле в сердечнике его индуцируются вихревые токи. Потери на гистерезис и на вихревые токи, называемые потерями в стали, обращаются в теплоту и нагревают сердечник якоря. Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря. Магнитная индукция определяет эдс машины или, иначе, напряжение, а частота перемагничивания зависит от частоты вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и частота его вращения постоянны.
Ко второй составляющей относятся потери энергии на нагревание проводов обмотки возбуждения и якоря проходящими по ним токами, называемые потерями в меди, — Роб. Потери в обмотке якоря и в щеточных контактах зависит от тока в якоре, т.е. являются переменными — меняются при изменении нагрузки.
Третья составляющая — механические потери Рмех, представляющие собой потери энергии на трение в подшипниках, трение вращающихся частей о воздух и щеток о коллектор. Эти потери зависят от частоты вращения якоря машины. Поэтому механические потери также постоянны и не зависят от нагрузки. Кпд машины в процентах (=Р2/Р1·100(, где Р2 — полезная мощность, Р1 — потребляемая машиной мощность. При работе машины в режиме двигателя потребляемая мощность Р1=I, полезная мощность Р2=UI-Рст-Роб-Рмех;
[pic] [pic][pic]
. Универсальные коллекторные двигатели
Принципиально любой двигатель постоянного тока может работать от сети переменного тока, так как развиваемый двигателем вращающий момент, зависящий от произведения тока в якоре и магнитного поля полюсов, не меняет направления при одновременном изменении направления тока в якоре и магнитного потока полюсов. Для создания достаточно большого вращающего момента необходима одновременность изменения направления тока в якоре и магнитного потока полюсов, т.е. совпадение по фазе тока в якоре и магнитного потока полюсов. В двигателе последовательного возбуждения ток в якоре является одновременно и током возбуждения. Пренебрегая углом сдвига фаз между током возбуждения и магнитным потоком, можно считать их изменения одновременными.
При малых мощностях коллекторные двигатели делают универсальными, т.е. предназначенными для работы как от сети переменного, так и от сети постоянного тока. Такие двигатели обычно выполняют без компенсационной обмотки. При работе от сети постоянного тока двигатель включается зажимами «0» и «—» (см. рис.6), а при работе от сети переменного тока — зажимами «0» и «1». Таким образом, при работе на переменном токе число витков обмотки возбуждения значительно меньше, чем при работе на постоянном токе, так что коэффициент мощности оказывается сравнительно высоким, несмотря на отсутствие компенсационной обмотки.
[pic]Рис.6
Однофазные коллекторные двигатели переменного тока малой мощности находят применение в установках автоматики, связи и бытовых целей.
. Помехи радиоприему и способы их подавления при работе коллекторных электродвигателей.
Электромагнитное излучение, сопровождающее работу коллекторного двигателя, создает помехи радиоприему. При работе коллекторного двигателя уровень создаваемых ими радиопомех не должен превышать установленных норм. Радиопомехи от коллекторного двигателя распространяются в виде электромагнитного излучения и в виде электрических сигналов через электросеть.
Для подавления электромагнитных излучений применяют экранирование электрических двигателей. В качестве экрана используют заземленный корпус двигателя. Если в подшипниковом щите со стороны коллектора имеются окна или корпус двигателя и передний подшипниковый щит (со стороны коллектора) изготовлены из пластмассы, то неметаллические части закрывают металлической сеткой и заземляют.
Для подавления радиопомех, проникающих в электрическую сеть, применяют разнообразные фильтры. В качестве фильтров используют конденсаторы, включенные между каждым токоведущим проводом и заземленным корпусом двигателя (Рис.7). Значение емкости С подбирают опытным путем. Конденсаторы должны быть рассчитаны на рабочее напряжение двигателя. Часто конденсаторные фильтры располагают в коробке выводов двигателя.
[pic]Рис.7
. Двигатели переменного тока
. Общие сведения об асинхронных двигателях
Асинхронный двигатель имеет такие позитивные качества, как несложная технология изготовления, простота эксплуатации, высокая надежность и способность к перегрузкам, отсутствие искрения. Благодаря этим свойствам асинхронный двигатель нашел широкое применение в промышленности для привода станков и механизмов, а также сельскохозяйственных машинах разного назначения. Однако управление частотой вращения асинхронного двигателя в широком диапазоне значительно сложнее, чем двигателя постоянного тока. Это ограничивает применение асинхронных двигателей в тех случаях, когда необходимо изменять частоту вращения двигателя в широких пределах. Однако следует отметить, что в последнее время, в связи с быстрым развитием силовой электроники, с появлением мощных полупроводниковых тиристоров и транзисторов, параметры которых постоянно улучшаются, возросло применение асинхронных двигателей с частотным регулированием скорости вращения. Асинхронные двигатели постепенно вытесняют двигатели постоянного тока, особенно в тех случаях, где искрение недопустимо, например в нефтяной, газовой и химической промышленности
. Принцип действия асинхронных двигателей
Наиболее распространенные среди электрических двигателей получил трехфазный асинхронный двигатель, впервые сконструированный известным русским электриком М.О.Доливо-Добровольским в 1890году.
Асинхронный двигатель отличается простотой конструкции и несложностью обслуживания. Как и любая машина переменного тока, асинхронный двигатель состоит из двух основных частей - ротора и статора. Асинхронная машина обладает свойством обратимости, то есть может быть использована как в режиме генератора, так и в режиме двигателя. Из-за ряда существенных недостатков асинхронные генераторы практически не применяются, тогда, как асинхронные двигатели получили очень широкое распространение.
Многофазная обмотка переменного тока создает вращающееся магнитное поле, частота вращения которого в минуту рассчитывается по формуле:
N1=60f1/p
где: n- частота вращения магнитного поля статора; f - частота тока в сети; р - число пар полюсов.
Если ротор вращается с частотой, равной частоте вращения магнитного поля статора, то такая частота называется синхронной.
Если ротор вращается с частотой, не равной частоте магнитного поля статора, то такая частота называется асинхронной.
В асинхронном двигателе рабочий процесс может протекать только при асинхронной частоте, то есть при частоте вращения ротора, не равной частоте вращения магнитного поля. Номинальная частота вращения асинхронного двигателя зависит от частоты вращения магнитного поля статора и не может быть выбрана произвольно. При стандартной частоте промышленного тока f1=50Гц возможные синхронные частоты вращения (частоты вращения магнитного поля)
N1=60f1/p=3000/p
Работа асинхронного электродвигателя основана на явлении, названном “диск Араго - Ленца”
Это явление заключается в следующем: если перед полосами постоянного магнита поместить медный диск, свободно сидящий на оси, и начать вращать магнит вокруг его оси при помощи рукоятки, то медный диск будет вращаться в том же направлении (Рис.7).
[pic]Рис.7
Это объясняется тем, что при вращении магнита его магнитное поле пронизывает диск и индуктирует в нем вихревые токи. В результате взаимодействия вихревых токов с магнитным полем магнита, возникает сила, приводящая диск во вращение. На основании закона Ленца направление всякого индуктивного тока таково, что он противодействует причине, его вызвавшей. Поэтому вихревые токи в теле диска стремятся задержать вращение магнита, но, не имея возможности сделать это, приводят диск во вращение так, что он следует за магнитом. При этом частота вращения диска всегда меньше, чем частота вращения магнита.
В асинхронных двигателях постоянный магнит заменен вращающимся магнитным полем, создаваемым трехфазной обмоткой статора при включении ее в сеть переменного тока.
Вращающееся магнитное поле статора пересекает проводники обмотки ротора и индуктирует в них ЭДС, то есть электродвижущую силу. Если обмотка ротора замкнута на какое-либо сопротивление или накоротко, то по ней под действием индуктируемой электродвижущей силы проходит ток.
В результате взаимодействия тока в обмотке ротора с вращающемся магнитным полем обмотки статора создается вращающейся момент, под действием которого ротор начинает вращаться по направлению вращения магнитного поля.
Если предположить, что в какой-то момент времени частота вращения ротора оказалась равной частоте вращения поля статора, то проводники обмотки ротора не будут пересекать магнитное поле статора и тока в роторе не будет. В этом случае вращающийся момент станет равным нулю и частота вращения ротора уменьшится по сравнению с частотой вращения поля статора, пока не возникнет вращающейся момент, уравновешивающий тормозной момент, который складывается из момента нагрузки на валу и момента сил трения в машине.
Асинхронная машина кроме двигательного режима может работать в генераторном режиме и режиме электромагнитного тормоза.
Генераторный режим возникает в том случае, когда ротор с помощью постоянного двигателя вращается в направлении вращения магнитного поля с частотой вращения, большей частоты вращения магнитного поля. Если ротор под действием посторонних сил начнет вращаться в сторону, противоположную направлению вращения магнитного поля, то возникает режим электромагнитного тормоза.
Режим электромагнитного тормоза начинается при n=0.
Для изменения направления вращения ротора, то есть для реверсирования двигателя, необходимо изменить направление вращения магнитного поля, созданного обмотками статора. Это достигается изменением чередования фаз обмоток статора, для чего следует поменять местами по отношению к зажимам сети любые два из трех проводов, соединяющих обмотку статора с сетью.
Вне зависимости от направления вращения ротора его частота n всегда меньше частоты вращения магнитного поля статора.
. Устройство асинхронных электродвигателей.
Сердечник статора, представляющий собой полый цилиндр, его набирают из отдельных листов электротехнической стали толщиной 0,5-0,35мм. Для сердечников асинхронных двигателей применяются холоднокатаные электротехнические стали марок 2013,02312,02411 и другие. Листы или пластины штампуют с впадинами (пазами), изолируют лаком или окалиной для уменьшения потерь на вихревые потоки, собирают в отдельные пакеты и крепят в станине двигателя.
К станине прикрепляют также боковые щиты с помещенными на них подшипниками, на которые опирается вал ротора. Станину устанавливают на фундамент (Рис.8).
Рис.8 Устройство асинхронного двигателя с короткозамкнутым ротором
[pic]
1. Вал
2,9 Подшипники
3,8 Подшипниковые щиты
4 Статор
5 Ротор
6 Корпус
7 Обмотка
В продольные пазы статора укладывают проводники его обмотки, которые соединяют между собой так, что образуется трехфазная система. На щитке машины имеется шесть зажимов, к которым присоединяются начала и концы обмоток каждой фазы. Для подключения обмоток статора к трехфазной сети они могут быть соединены звездой или треугольником, что дает возможность включать двигатель в сеть с двумя разными линейными напряжениями. Например, двигатель может работать от сети с напряжением 220 и 127в. На щитах машины указаны оба напряжения сети, на которые рассчитан двигатель, то есть 220/127в или 380/220в.
Для более низких напряжений, указанных на щитке, обмотка статора соединяется треугольником, для более высоких – звездой. При соединении обмотки статора треугольником на щитке машины верхние зажимы объединяют перемычками с нижними, а каждую пару соединенную вместе зажимов подключают к линейным проводам трехфазной сети. Для включения звездой три нижних зажима на щитке соединяют перемычками в общую точку, а верхние подключают к линейным проводам трехфазной сети (Рис.9).
[pic] Рис.9
Роторы асинхронных электродвигателей выполняют двух видов: с короткозамкнутой и фазной обмотками. Первый вид двигателей называют асинхронными двигателями с короткозамкнутым ротором, а второй – асинхронными двигателями с фазным ротором или асинхронными двигателями с контактными кольцами. Наибольшее распространение имеют двигатели с короткозамкнутым ротором. Сердечник ротора также набирают из стальных пластин толщиной 0,5мм, изолированных лаком или окалиной для уменьшения потерь на вихревые токи. Пластины штампуют с впадинами и собирают в пакеты, которые крепят на валу машины. Из пакетов образуются цилиндры с продольными пазами, в которых укладывают проводники обмотки ротора. В зависимости от типа обмотки асинхронные машины могут быть с фазным и короткозамкнутым ротором. Короткозамкнутая обмотка ротора выполняется по типу беличьего колеса. В пазах ротора укладывают массивные стержни, соединенные на торцевых сторонах медными кольцами. Часто короткозамкнутую обмотку ротора изготовляют из алюминия. Алюминий в горячем состоянии заливают в пазы ротора под давлением. Такая обмотка всегда замкнута накоротко и включение сопротивления в нее невозможно. Фазная обмотка ротора выполнена подобно статорной, то есть проводники соответствующим образом соединены между собой, образуя трехфазную систему. Обмотки трех фаз соединены звездой. Начала этих обмоток подключены к трем контактным медным кольцам, укрепленным на валу ротора. Кольца изолированы друг от друга и от вала и вращаются вместе с ротором. При вращении колец поверхности их скользят по угольным или медным щеткам, неподвижно укрепленным над кольцами. Обмотка ротора может быть замкнута на какое-либо сопротивление или накоротко при помощи указанных выше щеток. Двигатели с короткозамкнутым ротором проще и надежнее в эксплуатации, значительно дешевле, чем двигатели с фазным ротором. Однако двигатели с фазным ротором обладают лучшими пусковыми и регулировочными свойствами.
В настоящее время асинхронные двигатели выполняют преимущественно с короткозамкнутым ротором и лишь при больших мощностях и специальных случаях используют фазную обмотку ротора. Асинхронные двигатели производят мощностью от нескольких десятков ватт до 15000кВт при напряжениях обмотки статора до 6кВ. Между статором и ротором имеется воздушный зазор, величина которого оказывает существенное влияние на рабочие свойства двигателя. Наряду с важными положительными качествами – простой конструкции и обслуживания, малой стоимостью – асинхронный двигатель имеет и некоторые недостатки, из которых наиболее существенным является относительно низкий коэффициент мощности. У асинхронного двигателя соs( при полной нагрузке может достигать значения 0,85-0,9; при недогрузках двигателя его соs резко уменьшается и при холостом ходе составляет 0,2-0,3. Низкий коэффициент мощности асинхронного двигателя объясняется большим потреблением реактивной мощности, которая необходима для возбуждения магнитного поля. Магнитный поток в асинхронном двигателе встречает на своем пути воздушный зазор между статором и ротором, который в большей степени увеличивает магнитное сопротивление, а следовательно, и потребляемую двигателем мощность. В целях повышения коэффициента мощности асинхронных двигателей воздушный зазор стремятся делать наиболее минимальным, доводя его у малых двигателей (порядка 2-5кВт) до 0,3мм. В двигателях большой мощности воздушный зазор приходится увеличивать по конструктивным соображениям, но все же он не превышает 2-2,5мм. (справочные данные в таблице см. Таблица1) Вал ротора вращается в подшипниках, которые укреплены в боковых щитах, называемых подшипниковыми щитами. Главным образом это подшипники качения и только в машинах большой мощности иногда используются подшипники скольжения.
Подшипниковые щиты прикрепляют болтами к корпусу статора. В корпус запрессовывают сердечник статора.
Таблица1: Допустимые величины зазора между ротором и статором асинхронных двигателей
|Частота |Зазор, мм., при мощности электрического двигателя, кВт | |вращения, | | |об/мин | |
Из питающей сети (1) переменное напряжение промышленной частоты (~ U, = f) поступает на вход выпрямителя (2).
Для сглаживания пульсаций выпрямленного напряжения на выходе выпрямителя устанавливается фильтр (3).
И уже постоянное (= U) (сглаженное) напряжение подаётся на вход управляемого импульсного инвертора тока (4).
Электронные ключи инвертора по сигналам системы управления (8) открываются и запираются таким образом, что формируемые при этом различные по длительности импульсы тока складываются в результирующую кривую синусоидальной формы с необходимой частотой.
Для сглаживания пульсаций, на выходе инвертора может устанавливаться дополнительный высокочастотный фильтр (5).
Затем напряжение подаётся на обмотки электродвигателя (М), который является приводом механизма технологической системы (6).
Подлежащий регулированию параметр технологической системы измеряется датчиком (7), управляющий сигнал от которого подаётся в систему управления ЧРП (8). Либо внешняя система управления (9) собирает информацию о многих параметрах, характеризующих работу технологической системы, обрабатывает её и подаёт результирующий сигнал в систему управления приводом.
В зависимости от величины, иногда скорости изменения этого сигнала, и программных установок, микропроцессорная система управления ЧРП формирует и подаёт управляющие импульсы на электронные ключи выпрямителя и инвертора.
Для самоконтроля и защиты система управления собирает и обрабатывает сигналы о наличии или величине ряда параметров, характеризующих работу собственных подсистем. Контролируются токи и напряжения на входе, выходе из преобразователя и в магистрали постоянного тока. Измеряется температура элементов и регулируется производительность системы охлаждения преобразователя. Контролируется состояние отдельных элементов вплоть до отдельного ключа. При наличии специального датчика в корпусе электродвигателя измеряется, а при отсутствии датчика рассчитывается по электрическим характеристикам потребляемой двигателем энергии температура двигателя.
Таковы общие принципы частотного регулирования электроприводов. Конкретные схемные решения в зависимости от условий различны, различаются и принципы управления частотно-регулируемым электроприводом.
Как и большинство технических решений такого рода, частотное регулирование электроприводов имеет свои недостатки и ограничения.
. Автоматическое управление двигателями переменного тока
Асинхронные двигатели с короткозамкнутым ротором запускают прямым включением в сеть. Схемы управления двигателями переменного тока имеют коммутационную аппаратуру, устройства защиты и различные блокировки. Простейшей схемой управления асинхронным двигателем с короткозамкнутым ротором является схема с автоматом и контактором или с реверсивным магнитным пускателем.
Схема пуска асинхронного двигателя с помощью контактора показана на рис.21
Рис.21
Защитные функции выполняет автомат QF, отключающий двигатель при коротких замыканиях и чрезмерных бросках тока. Контактор КМ обеспечивает дистанционное управление двигателем с помощью кнопок управления SB1, SB2.
Схема управления асинхронного двигателя с помощью реверсивного магнитного пускателя показана на рис.22
Рис.22
Защита двигателя от коротких замыканий осуществляется плавкими вставками, а от перегрузок – встроенными в магнитный пускатель M тепловыми реле FP1 и FP2. Магнитный пускатель производит дистанционный пуск, реверс и остановку асинхронных двигателей мощностью до 75кВт, работающих в продолжительном режиме. Иногда его можно использовать при кратковременном или повторно- кратковременном режиме с небольшим количеством включений в час. Командным аппаратом является кнопочная станция с кнопками SB1 («Стоп»), SB2 («Назад») и SB3 («Вперед»). Торможение в рассмотренных схемах осуществляется за счет трения в подвижных частях механизма.
Схема торможения асинхронного электродвигателя в функции времени (Рис.23, а). При вращении двигателя реле времени КТ включено и замыкающим контактом подготавливает цепь контактора торможения КМТ к работе. При нажатии кнопки SB1(«Стоп») контактор КМ теряет питание и своим размыкающим контактом подключает контактор КМТ к сети. Начинается процесс динамического торможения двигателя, длительность которого определяется установкой реле КТ.
Рис.23, а. Схема динамического торможения асинхронного двигателя в функции времени
Схема торможения АД в функции времени с прямым её контролем индукционным реле (Рис.23, б). При включенном двигателе контактор КМВ втянут, реле КС, замкнув свой контакт, подготовило к включению контактор КМТ. После нажатия кнопки SB1(«Стоп») контактор КМВ отключается и своим вспомогательным контактом включает контактор КМТ. Начинается процесс торможения в режиме противовключения. При угловой скорости двигателя, близкой к нулю, контакт реле К размыкается и отключает контактор КМТ, двигатель останавливается.
[pic]
Рис.23, б
Типовые схемы управления электрическими двигателями постоянного тока
. Пуск в ход двигателей постоянного тока
В начальный момент пуска в ход якорь двигателя неподвижен, противо- ЭДС равна нулю (Е=0). При непосредственном включении двигателя в сеть в обмотке якоря будет протекать чрезмерно большой ток Iпус=U/Rя. Поэтому непосредственное включение в сеть допускается только для двигателя очень маленькой мощности, у которых значение падения напряжения в якоре относительно большое и изменения тока не столь велики.
В машинах постоянного тока большой мощности падение напряжения в обмотке якоря при полной нагрузке составляет несколько процентов от номинального напряжения, т.е. IRя=(0,02—0,01)U. Следовательно, пусковой ток в случае включения двигателя в сеть с номинальным напряжением во много раз превышает номинальный.
При пуске в ход для ограничения пускового тока используют реостаты, включаемые последовательно с якорем двигателя. Пусковые реостаты представляют собой проволочные сопротивления, рассчитываемые на кратковременный режим работы, и выполняются ступенчатыми, что дает возможность изменять ток в якоре двигателя в процессе пуска его в ход.
Схема двигателя параллельного возбуждения с пусковым реостатом показана на рис.24.
Рис.24 Пусковой реостат этого двигателя имеет три зажима, обозначаемые буквами Л, Я, Ш. Зажим Л соединен с движком реостата и подключается к одному из полюсов рубильника (к линии). Зажим Я соединяется с сопротивлением реостата и подключается к зажиму якоря. Зажим Ш соединен с металлической шиной, помещенной на реостате (шунт). Движок реостата скользит по шине так, что между ними имеется непрерывный контакт. К зажиму Ш через регулировочный резистор Rр присоединяется обмотка возбуждения. Другие зажимы якоря и обмотки возбуждения соединены между собой перемычкой и подключены к другому полюсу рубильника, включающего двигатель в сеть. При пуске в ход включается рубильник и движок реостата переводится на контакт 1, так, что последовательно с якорем соединено полное сопротивление реостата ПР, которое выбирается таким, чтобы больший ток при пуске в ход Imax не превышал номинальный ток более чем в 1,7(2,5 раза, т.е. Rn=(U/Imax)—Rя. При включении двигателя в сеть по обмотке возбуждения также проходит ток, возбуждающий магнитный поток. В результате взаимодействия тока в якоре с магнитным полем полюсов создается пусковой момент. Если пусковой момент окажется больше тормозного момента на валу двигателя (Мпуск>Мт), то якорь машины придет во вращение.
Когда ток в якоре уменьшится до небольшого значения Imin, движок пускового реостата переводится на контакт 2, при этом сопротивление реостата уменьшится на одну ступень. Ток в якоре снова возрастет до значения Imax, а с увеличением тока в якоре возрастет вращающий момент, вследствие чего частота вращения ротора вновь увеличится. Переключая движок реостата, сопротивление пускового реостата постепенно (ступенями) уменьшается, пока оно полностью не будет выведено (движок реостата на контакте 5), и в рабочем режиме ток и частота вращения якоря принимают установившиеся значения.
При отключении двигателя от сети металлическая шина пускового реостата должна быть соединена с зажимом 1. Это необходимо для того, чтобы не было разрыва цепи обмотки возбуждения, имеющий значительную индуктивность. Кроме того, движок пускового реостата переводится на холостой контакт 0, и рубильник отключается.
. Регулирование частоты вращения двигателей постоянного тока
В двигателях постоянного тока имеется возможность плавно и экономично регулировать частоту вращения в широких пределах. Благодаря этому весьма ценному свойству они получили широкое распространение и часто являются незаменимыми. Частота вращения якоря двигателя при любой схеме возбуждения определяется следующим выражением:
[pic], где Rc – сопротивление последовательной обмотки возбуждения (Для двигателя параллельного возбуждения Rc=0). Это выражение показывает, что частота вращения двигателя зависит от напряжения сети, сопротивления цепи якоря и магнитного потока.
Частоту вращения регулируют путем изменения напряжения сети в том случае, когда источником электрической энергии двигателя является какой- либо генератор.
Для регулирования частоты вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается КПД двигателя.
Регулируют частоту вращения якоря двигателя также изменением магнитного потока, который зависит от тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат, а в двигателях последовательного возбуждения для этой цели шунтируют обмотку возбуждения каким-либо регулируемым сопротивлением. Этот способ регулирования частоты практически не создает дополнительных потерь и экономичен.
. Автоматическое управление двигателями постоянного тока
Типовая схема автоматического пуска двигателя в функции времени в две ступени показана на рис.25
[pic]Рис.25
Для автоматического пуска используют два электромагнитных реле времени КТ1 и КТ2, контакты которых работают с выдержкой времени только при отключении реле. После подачи напряжения в цепь управления (перед пуском двигателя) реле КТ1 получает питание и, втягиваясь, размыкает свой контакт, не позволяя тем самым сразу включать контакторы ускорения КМ2 и КМ3. После включения контактора КМ1 двигатель работает на искусственной характеристике 1 (см.рис.26).
Рис.26
Реле КТ1 (Рис.25) начинает отсчет времени и через время t1, определяемое его установкой, замыкает свой контакт в цепи контактора КМ2. Срабатывание контактора ускорения КМ2 приводит к закорачиванию сопротивления добавочного резистора R1, и двигатель разгоняется по искусственной характеристике 2 (Рис.26) Одновременно закорачивается катушка КТ2, и через время t2 реле КТ2 своим замыкающим контактом включает контактор КМ3. При этом происходит шунтирование сопротивления добавочного резистора R2 и двигатель выходит на естественную характеристику 3 (см.рис.26), на которой двигатель разгоняется до установившейся угловой скорости wуст.
Остановка двигателя в схемах автоматического управления обычно происходит в режиме динамического торможения или противовключением. Динамическое торможение чаще всего осуществляется в функции скорости, ЭДС или времени. Типовая схема управления динамическим торможением двигателем постоянного тока в функции ЭДС показана на рис.27
[pic]Рис.27
В исходном состоянии перед торможением двигатель работает с установившейся угловой скоростью wуст. Контактор КМ1 включен, и пусковые сопротивления закорочены. После нажатия кнопки SB1 («Стоп») контактор КМ1 отключается и своим силовым контактом отсоединяет якорь двигателя от сети. Размыкающий вспомогательный контакт КМ1 закрывается в цепи реле KV, которое оказывается под напряжением V(eд, так как двигатель продолжает вращаться и при наличии тока возбуждения в якоре наводится ЭДС. Реле KV срабатывает и включает контактор напряжения KM, который подключает сопротивление торможения к цепи якоря. Двигатель переходит в режим динамического торможения (Рис.27). При снижении скорости двигателя уменьшается его ЭДС, катушка реле KV отключается и контактор КМ2 теряет питание. Реле KV должно срабатывать при минимально Возможном напряжении.
. Реверсирование двигателя постоянного тока
Для того чтобы изменить направление вращения двигателя постоянного тока необходимо изменить полярность питания на обмотке возбуждения или якоре. Изменение полярности питания двигателя направление вращения не изменит. Простейшая схема реверсирования двигателя приведена на рис.34.
[pic] Рис.34
Схема состоит из двух магнитных пускателей К1 и К2, кнопок ПВ («Пуск вперед»), ПН («Пуск назад») и СТ («Стоп»), двигателя постоянного тока.
При включении кнопки ПВ («Пуск вперед») электрический ток проходит по цепи: «+» источника питания, замкнутая кнопка СТ («Стоп»), замкнутые контакты кнопки ПВ («Пуск вперед), замкнутые контакты К2, магнитный пускатель К1, «--» источника питания. Магнитный пускатель сработает и замкнет свои сигнально-блокировочные (в цепи управления) и силовые контакты (в цепи якоря). Когда сигнально-блокировочный контакт К11, подключенный параллельно кнопки ПВ, замкнется кнопку ПВ можно отпустить. Через замкнутые контакты К1, в цепи ротора, напряжение сети будет приложено к якорю, по цепи: «+» источника питания, замкнутый контакт К1, сопротивление Rя, катушка якоря, замкнутый контакт К2, «--» источника питания. Двигатель начнет вращаться. Второй сигнально-блокировочный контакт К11 разомкнется и заблокирует магнитный пускатель К2, для того чтобы не включались одновременно два пускателя «Вперед» и «Назад».
Для того чтобы двигатель вращался в другую сторону необходимо нажать кнопку ПН («Пуск назад»). Электрический ток потечет по цепи: : «+» источника питания, замкнутая кнопка СТ («Стоп»), замкнутые контакты кнопки ПН («Пуск назад»), замкнутые контакты К1, магнитный пускатель К2, «--» источника питания. Магнитный пускатель К2 сработает и замкнет свои контакты. Когда сигнально-блокировочный контакт К21, подключенный параллельно кнопки ПН, замкнется кнопку ПН можно отпустить. Через замкнутые контакты К2, в цепи ротора, напряжение сети будет приложено к якорю, по цепи: «+» источника питания, замкнутый контакт К2, катушка якоря, сопротивление Rя, замкнутый контакт К1, «--» источника питания. Двигатель начнет вращаться в противоположном направлении.
Для остановки двигателя необходимо нажать кнопку СТ («Стоп») цепь питания магнитных пускателей будет порвана. Обесточенные пускатели разомкнут свои контакты в цепи якоря и двигатель остановится.
. Защита электрических двигателей
Нормальная эксплуатация электрических двигателей возможна при правильной организации их защиты от выхода из строя в различных аварийных режимах.
Применяют следующие виды электрической защиты электродвигателей: максимально-токовую от коротких замыканий или недопустимых бросков тока; защиту от перегрева, обрыва обмотки возбуждения перенапряжения, превышения напряжения, самозапуска и др.
Максимально-токовая защита двигателя обеспечивает немедленное отключение его силовой цепи при возникновении недопустимо больших токов. В силовых цепях эта защита осуществляется: плавкими предохранителями, автоматическими выключателями и максимально-токовыми реле (Рис.28, а, б, в)
Рис.28[pic]
Рис.28 Типовые узлы защиты электродвигателей при коротких замыканиях: а. С плавкими предохранителями б. С автоматами в. С максимально-токовыми реле
[pic]
Ток плавкой вставки в предохранителях и ток установки автомата или максимально-токового реле выбирают для асинхронных короткозамкнутых двигателей из следующих условий: нормальный пуск (tп>5 c) Iвст.ном.(0,4Iп; тяжелый пуск (tп>10 c) Iвст.ном.((0,5(0,6)Iп ; независимо от условий пуска Iвст.ном.((1,3(1,5)Iп .
Защита двигателя от перегрева обеспечивает отключение электрической машины в случае перегрузки механизма. При продолжительном режиме работы асинхронного двигателя используют два тепловых реле FР1 и FР2 (Рис.29) или автоматы с тепловым расцепителем, при повторно-кратковременном режиме – два максимально-токовых реле FA1 и FA2 (Рис.30). Реле FA3 служит для защиты двигателя от коротких замыканий. Для асинхронных двигателей используют два тепловых или максимально-токовых реле в двух фазах, а для машин постоянного тока ставят одно реле.
Номинальный ток нагревательного элемента теплового реле и теплового расцепителя автомата выбирают из условия
Iн.э.= Iт.р.( Iном.
Рис.29
В схему (Рис.30) вводится реле времени КТ, которое шунтирует контакты реле FA1 и FA2 во время пуска двигателя (пусковой ток значительно больше, чем ток нагрева). Ток уставки максимально токовых реле выбирают следующим образом: I3ф
Похожие работы
... В 3 Экономическая часть 3.1 Обоснование модернизации ЭО и автоматики станка Для экономического обоснования модернизации электрооборудования и автоматики токарно винторезного станка 16Б16П нам необходимо провести техникоэкономическое сравнение двух вариантов схем управления станком. Обоснование выбора сравниваемых вариантов производим по величине приведенных затрат. Исходя из сведений ...
... 5 -7м ), что связано с увеличением площади устоев. 2.3. Определение мощности и выбор электродвигателя для электро- механического привода двустворчатых ворот судоходного шлюза. Электроприводы основных механизмов судоходных гидротехнических сооружений являются ответственными элементами электрооборудования шлюзов. Несоответствие выбранного привода технологическому режиму, неполный счет факторов, ...

... путем изменения воздухо-производительности вентилятора. 2. Общая электротехническая часть 2.1 Характеристики систем инженерного обеспечения здания свинарника В проектируемом свинарнике – откормочнике на 600 голов имеются следующие системы инженерного обеспечения: кормораздача, навозоудаление, водоснабжение, связь, вентиляция и отопление. Кормовая мешанка приготавливается в кормоцехе, ...
... реле, а также исключают подмагничивание сердечника трансформатора 2ИСТ полуволной переменного тока, которая замыкается через выпрямители блока БВС. Установка блока БВС непосредственно в стрелочном электроприводе вызвана тем, чтобы при сообщении проводов 2-2 и 2-4 (или 2-3 и 2-5) не появился ложный контроль положения стрелки, т.к обмотка контрольного реле будет обтекаться переменным током и реле ...
0 комментариев