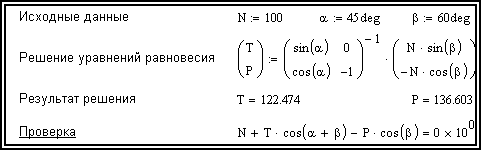
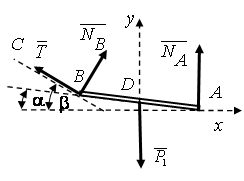
Задание Д-1
Дано:
![]()
Найти:
![]() и уравнение
траектории
на участке BC.
и уравнение
траектории
на участке BC.
Решение:
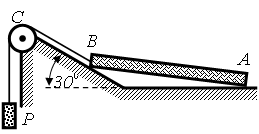
Рассмотрим движение тела принимаемого за материальную точку на участке AB ![]() .
.
Покажем силы
действующие
на тело: ![]() -
сила тяжести,
-
сила тяжести,
![]() -
нормальная
реакция поверхности,
-
нормальная
реакция поверхности,
![]() -
сила трения.
-
сила трения.
Знаем: ![]()
В проекциях
на оси ![]() и
и ![]() имеем:
имеем:
Так как тело
движется вдоль
оси ![]() ,
то проекции
перемещения
скорости и
ускорения на
ось
,
то проекции
перемещения
скорости и
ускорения на
ось ![]() равны 0, тогда
уравнение
равны 0, тогда
уравнение ![]() принимает вид:
принимает вид:
![]() ,
откуда
,
откуда ![]()
Знаем: ![]()
У нас: ![]()
Учтём ![]() в уравнение
в уравнение
![]()
![]() или
или
![]() ,
где
,
где ![]() -
постоянная
величина
-
постоянная
величина
Интегрируем
уравнение ![]()
![]() или
или
![]()
т.е. ![]()
![]()
Для определения
постоянных
интегрирования
![]() и
и ![]() запишем начальные
условия движения
тела на участке
AB. При
запишем начальные
условия движения
тела на участке
AB. При ![]() в положении
А имеем:
в положении
А имеем: ![]()
Подставим
начальные
условия в уравнения
![]() и
и ![]() получим:
получим:
![]() ,
откуда
,
откуда ![]()
![]() ,
откуда
,
откуда ![]()
Запишем уравнение
![]() и
и ![]() с учётом постоянных
интегрирования
с учётом постоянных
интегрирования
![]() и
и ![]()
В положении
B, при ![]() имеем:
имеем:
![]()
![]()
Запишем уравнение
![]() при
при ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рассмотрим движение тела на участке BC ![]() , T – время движения тела от B до C
, T – время движения тела от B до C
Знаем: ![]()
В проекциях на оси имеем:
![]() или
или
![]() ,
т.е.
,
т.е. ![]()
![]() или
или ![]()
или ![]() ,
т.е.
,
т.е. ![]()
Для определения
постоянных
интегрирования
![]() запишем начальные
условия движения
на участке BC.
запишем начальные
условия движения
на участке BC.
При ![]() в положении
B:
в положении
B:
![]()
![]()
Подставим эти
начальные
условия в уравнения
![]() :
:
![]()
![]()
![]()
![]()
Запишем уравнения
![]() с учётом найденных
постоянных
интегрирования:
с учётом найденных
постоянных
интегрирования:
В положении
С при ![]() :
:
![]()
![]()
Из ![]() выражаем t:
выражаем t:
![]()
Подставим в
![]() :
:

Ответ: ![]()
Задание Д-10-2
Дано:
![]()
![]()
Определить:
![]()
Решение:
Применим теорему об изменении кинетической энергии системы:
![]()
где ![]() и T – кинетическая
энергия системы
в начальном
и конечном
положениях;
и T – кинетическая
энергия системы
в начальном
и конечном
положениях;
![]() –
сумма работ
внешних сил,
приложенных
к системе, на
перемещении
системы из
начального
положения в
конечное;
–
сумма работ
внешних сил,
приложенных
к системе, на
перемещении
системы из
начального
положения в
конечное;
![]() – сумма работ
внутренних
сил системы
на том же перемещении;
– сумма работ
внутренних
сил системы
на том же перемещении;
т.к. система
состоит из
абсолютно
твёрдых тел,
соединяющих
нерастяжимыми
нитями и стержнями,
то ![]() ,
т.к. в начальном
положении
системы находится
в покое, то
,
т.к. в начальном
положении
системы находится
в покое, то ![]() ;
;
Тогда уравнение
![]() принимает вид:
принимает вид:
![]()
Вычислим кинетическую энергию системы в конечном положении:
![]()
Кинетическая энергия груза 1, движущегося поступательно:
![]()
Кинетическая энергия блока 2, совершающего вращательное движение:

Кинетическая энергия катка 3, совершающего плоское движение:

т.к. ![]()

тогда формула
![]() приобретает
следующий вид:
приобретает
следующий вид:


Определим сумму работ всех внешних сил, приложенных к системе, не заданном перемещением:
![]()
Работа силы
трения ![]() :
:
![]()
Работа силы
трения ![]() :
:
![]()
Работа
силы тяжести
![]() :
:
![]()
Определим, на кокой угол повернётся каток 3 при прохождении грузом 1 расстояния S:
![]()
Работа пары сил сопротивления качания тела 3:
![]() где
где ![]()
![]()
Силы ![]() (т.к. сила
(т.к. сила ![]() приложена в
мгновенном
центре скоростей)
работы не совершают.
приложена в
мгновенном
центре скоростей)
работы не совершают.
Поэтому
![]()


Приравниваем
значения T
и ![]() :
:
![]()
Задание К-1
Тема: «Определение скорости и ускорения точки по заданным уравнениям её движения»
Дано:
![]()
![]()
![]()
Решение:
Уравнения движения (1) и (2) являются параметрическими уравнениями траектории движения точки М. Чтобы получить уравнение траектории в координатной форме, исключим время t из уравнений (1) и (2).
Из уравнения
(2): ![]() подставим в
уравнение (1),
получим
подставим в
уравнение (1),
получим ![]()
Это уравнение параболы.
Построим параболу по точкам, значения которых приведены в таблице:
| y | -10 | -8 | -6 | -4 | -2 | 0 | 2 | 4 | 6 | 8 | 10 |
| x | 3,531 | 2,979 | 2,551 | 2,245 | 2,061 | 2 | 2,061 | 2,245 | 2,551 | 2,979 | 3,531 |
Найдём положение точки М при t=0
![]()
![]()
Это точка
![]() (2;0)
(2;0)
Найдём положение
точки М при ![]()
![]()
![]()
Это точка
![]() (2,75;-7)
(2,75;-7)
Модуль скорости ![]() где
где ![]()
при ![]() поэтому покажем
поэтому покажем
![]() из
из ![]() в направлении
положительного
отсчёта оси
x.
в направлении
положительного
отсчёта оси
x.
![]() поэтому
покажем
поэтому
покажем ![]() из точки
из точки ![]() в отрицательном
направление
оси y.
Итак, при
в отрицательном
направление
оси y.
Итак, при ![]()
![]()
Масштаб ![]() :
1 см - 2 см/с
:
1 см - 2 см/с
Определяем ускорение, которое имеет точка, движущаяся по параболе.
![]() где
где ![]() поэтому покажем
поэтому покажем
![]() в направлении
положительного
отсчёта оси
x
их точки
в направлении
положительного
отсчёта оси
x
их точки ![]()
Аналогично
![]()
Итак, при ![]()
![]()
Масштаб ![]() :
1 см - 2 см/
:
1 см - 2 см/![]()
Знаем: ![]() при
при ![]()
![]() значит движение
точки ускоренное,
поэтому покажем
значит движение
точки ускоренное,
поэтому покажем
![]() в сторону вектора
в сторону вектора
![]()
Полное ускорение ![]() откуда
откуда ![]()
при ![]()
![]()
![]() покажем из
точки
покажем из
точки ![]() по нормали к
траектории.
по нормали к
траектории.
Знаем: ![]() где
где ![]() - радиус кривизны траектории в точки
- радиус кривизны траектории в точки ![]()
при ![]()
Из точки ![]() вдоль нормали
n
отложим
вдоль нормали
n
отложим ![]() и получим точку
и получим точку
![]() –
центр кривизны
параболы в
точке
–
центр кривизны
параболы в
точке ![]()
Координаты
точки, а также
её скорость,
ускорение и
их проекции
на координатные
оси для ![]() приведены ниже
приведены ниже
| координаты, см | скорость, см/с | ускорение, см/ | радиус кривизны, см | |||||||
| x | y |
|
|
|
|
|
|
|
|
|
| 2,75 | -7 | 3 | -14 | 14,32 | 6 | 0 | 6 | 1,257 | 5,867 | 34,95 |
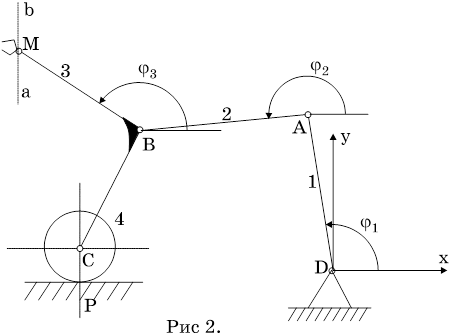
Задание К-4
Дано:
ОА=35 см, АВ=65 см,
r=15 см, ![]()
Найти:
![]()
Решение:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Ответ: ![]()
т. Р – полюс звена 2
т. Р` – полюс звена 3
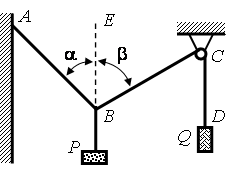
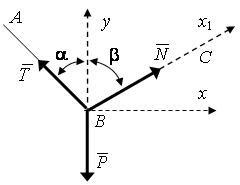
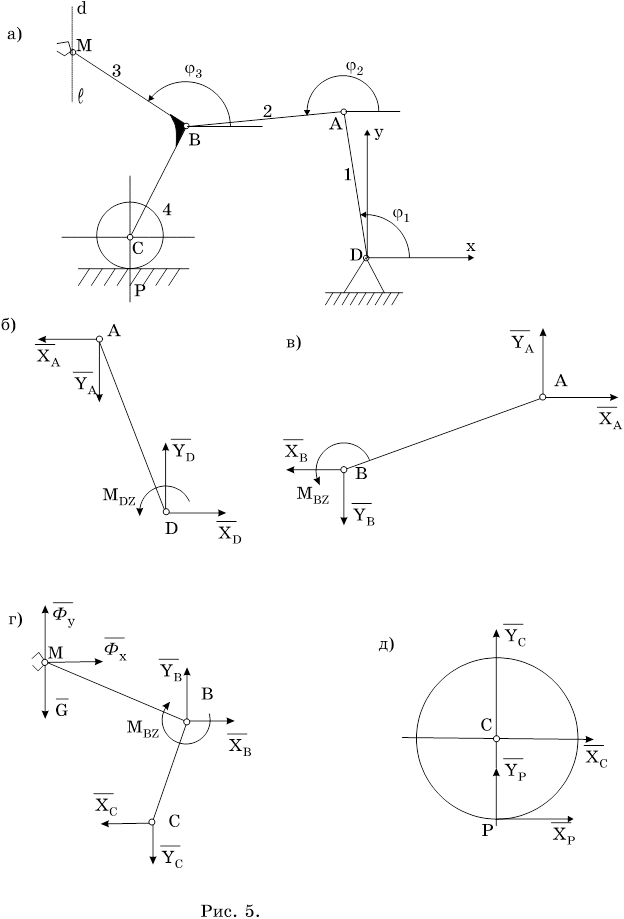
Задание С-7-22
Тема: Определение реакций опор твёрдого тела.
Дано:
![]()
Определить: все реакции опор конструкции (в нашем случае реакции цилиндрических шарниров А и В и стержня CD)
Решение:
Предположим, что реакции подшипников будут направлены следующим образом ![]() реакция стержня
реакция стержня ![]() вдоль DC кверху.
вдоль DC кверху.
Спроецируем все силы системы на соответствующие оси координат.
![]() где
где ![]() направление
других реакций
см. выше.
направление
других реакций
см. выше.
Составим уравнение равновесия сил системы:
а) ![]() или
или ![]()
б) ![]() вдоль оси
вдоль оси ![]() никаких взаимодействий
не происходит
никаких взаимодействий
не происходит
в) ![]()
Т.к. неизвестных пока больше чем уравнений => составим уравнения равновесия моментов сил системы:
г) ![]()
д) ![]() т.к.
т.к. ![]() направление
направление
![]() было выбрано
верно.
было выбрано
верно.
е) ![]()
Зная ![]() найдём
найдём ![]() из е) :
из е) :![]()
![]() т.к.
т.к. ![]() истинное направление
истинное направление ![]() противоположно выбранному.
противоположно выбранному.
Зная ![]() и
и ![]() найдём
найдём ![]() из а) :
из а) :![]()
![]() направление
направление
![]() противоположно
выбранному.
противоположно
выбранному.
Найдём ![]() из г) :
из г) :
![]() т.к.
т.к. ![]() направление
направление
![]() выбрано верно.
выбрано верно.
Зная ![]() найдем
найдем ![]() из в) :
из в) : т.к.
т.к. ![]() направление
направление
![]() выбрано верно.
выбрано верно.
Т.к. ![]()
Т.к. ![]()
Проверка:
Для проверки
выберем новую
систему координат
с центром в
точке ![]() (
(![]() точка приложения
силы G) и
осями соноправленными
со старыми (см.
рисунок)
точка приложения
силы G) и
осями соноправленными
со старыми (см.
рисунок)


=> реакция ![]() ;
;
![]() и
и ![]() -
найдены верно.
-
найдены верно.
![]()
![]()
=>
реакция ![]() и
и ![]() -
найдены верно.
-
найдены верно.
Задание С-2
Тема: «Определение реакций опор составной конструкции»
Дано:
![]()
![]()
![]()
![]()
Определить: Все реакции опор (в нашем случае в неподвижном шарнире А и в подвижном шарнире В). Трением пренебрегаем.
Решение:
Предположим, что реакции шарнира будут направлены следующим образом: ![]() перпендикулярно вверх,
перпендикулярно вверх, ![]() горизонтально вправо (см. рис.), а реакция подвижного шарнира В
горизонтально вправо (см. рис.), а реакция подвижного шарнира В ![]() направлена перпендикулярно вверх.
направлена перпендикулярно вверх.
Рассчитаем результирующее распределение нагрузки ![]()
![]()
![]() приложена
к балке под
центром тяжести
эпюры (т.е. посередине
АС)
приложена
к балке под
центром тяжести
эпюры (т.е. посередине
АС)
Введём систему координат с осями ![]() и
и ![]() причём
причём ![]() ;
; ![]() ; теперь спроецируем все имеющиеся в системе силы на выбранные оси: (сила скользирующий вектор)
; теперь спроецируем все имеющиеся в системе силы на выбранные оси: (сила скользирующий вектор)
![]() ,
, ![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]()
Составим уравнение равновесия системы сил. Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на оси координат были = 0, а также сумма моментов всех сил относительно какой-либо точки плоскости была = 0.
В нашей системе 3 неизвестных => составим уравнение равновесия моментов сил системы. Для простоты выберем за моментную точку пересечения линий действия ![]() и
и ![]() т.е. точку А.
т.е. точку А.
![]() (Против часовой
стрелки берём
с плюсом, по
с
минусом)
(Против часовой
стрелки берём
с плюсом, по
с
минусом)
![]()
![]()
![]()
![]() ,
т.к. значение
,
т.к. значение
![]() направление
выбрано правильно
направление
выбрано правильно
Теперь подставим значение ![]() в уравнения 1 и 2
в уравнения 1 и 2
![]() ,
т.к.
,
т.к. ![]() направление
было выбрано
правильно.
направление
было выбрано
правильно.
![]() ,
,
![]() истинное направление
противоположно
выбранному.
истинное направление
противоположно
выбранному.
Проверка:
Для проверки
нужно составить
уравнение
моментов, причём
через моментную
точку не должны
проходить линии
действия реакций
=> Возьмём за
моментную точку
N (N
находится на
линии действия
![]() за 1 м от СА)
за 1 м от СА)
![]()
![]()
![]()
![]() ;
; ![]() ,
т.к.
,
т.к. ![]() результат
полученный
при сложении
моментов сил
погрешн
результат
полученный
при сложении
моментов сил
погрешн
Похожие работы
... , а в ходе решения обрести уверенность, что ответ получен правильный. Для этого решение необходимо проверить, специалисты сказали бы – «провести экспертизу проекта». В пособии показано, как в задачах статики можно провести подобную экспертизу, то есть путем проверки убедиться в правильности решения. Общие методические указания Основная практическая задача статики - определение реакций связей, ...
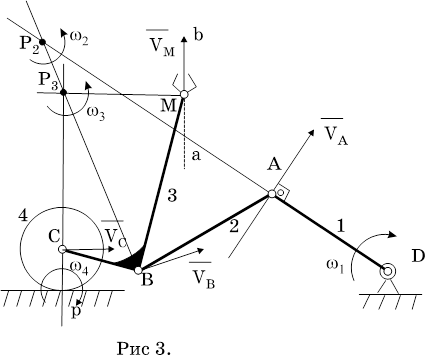
(3) w3z=w3z (j1, j2, j3, VM); w4z=w4z (j1, j2, j3, VM) или Vc=Vc (j1, j2, j3, VM) Из уравнений (3) определяют угловые скорости звеньев для фиксированного момента времени при заданных в этот момент значениях j1, j2, j3. Изменение j1, j2, j3, а следовательно и w1z, w2z, w3z во времени определится,если дополнить систему (3) уравнениями: ...
... характеристикой. Министерство образования Российской Федерации Регистрационный № 06-0613-ВР ГОСУДАРСТВЕННЫЙ ОБРАЗОВАТЕЛЬНЫЙ СТАНДАРТ СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ ГОСУДАРСТВЕННЫЕ ТРЕБОВАНИЯк минимуму содержания и уровню подготовки выпускников по специальности 0613 Государственное и муниципальное управление (базовый уровень среднего профессионального образования) Квалификация - ...
... цепи W1(s) = Wp(s) представлено как параллельное соединение простейших звеньев. 2.9 Неопределенность моделей систем управления Математические модели не отражают исчерпывающим образом динамические свойства систем управления в силу идеализации и упрощений, неизбежных при моделировании, неточной реализации алгоритмов управления и изменений характеристик объектов и других элементов в ...
0 комментариев