Навигация
2.2 Трение качения.
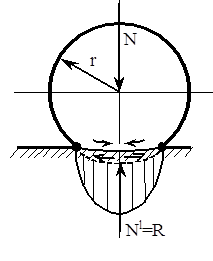
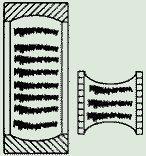
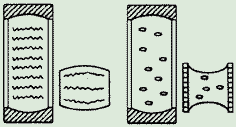
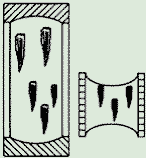
Если бы колесо, катящееся по основанию, не испытывало проскальзывания, то такое движение было бы чистым качением и путь, проходимый любой точкой поверхности колеса по основанию за один оборот, составлял бы 2pr. Однако качения без проскальзывания не бывает. Колесо и основание испытывают упругие деформации. При этом колесо в зоне контакта сжимается, а основание - растягивается (стрелки на рис. а).
а) б)
Взаимодействия колеса с опорой.
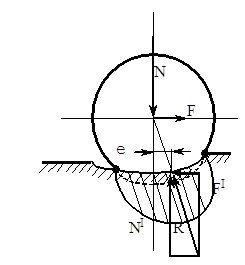
Поэтому на контакте постоянно происходит проскальзывание колеса относительно основания. Это один из источников рассеяния энергии. Другим источником является вязкоупругое поведение материалов основания колеса. Если к оси колеса не приложено тяговое усилие, то дуга контакта симметрична (см. рис. а), и реакция опоры соосна с нормальной нагрузкой. Если приложить тяговое усилие и колесо приходит в движение, то зона контакта искажается (см. рис.б). Материал сзади колеса не успевает восстановить форму. При малых скоростях коэффициент трения качения увеличивается с повышением скорости, а при больших - уменьшается.
Также существует гидродинамическое трение как один из основных видов трения.
Гидродинамическое (жидкостное) трение характеризуется тем, что трущиеся поверхности разделены слоем масла. Минимальная толщина слоя должна быть больше, чем суммарная высота наиболее высоких микронеровностей обеих поверхностей: hmin³ (Rmax1+Rmax2).
2.3 Фрикционные автоколебания.
Проведём самый простой эксперимент. Будем тянуть тело с помощью троса, в который врезана пружина динамометра, и притом потянем за хвостик с постоянной скоростью. Окажется, что само тело не двигается с той же скоростью, а перемещается толчками. И это легко качественно объяснимо с помощью представленной выше картины. Действительно, один конец пружины прикреплен к телу, а второй начинает удаляться. К телу приложена упругая сила пружины, пропорциональная ее растяжению. Вначале эта сила мала и меньше силы упругого сцепления контакта (трения покоя), так что тело стоит на месте, а точнее, испытывает только незаметное микросмещение. При дальнейшем вытягивании сила пружины преодолевает силу контакта и тело начинает скользить по поверхности. Но сила сопротивления скольжению ниже статического трения, и возникает положительная разность сил, разгоняющая тело. Пружина начнет сжиматься, а создаваемая ею упругая сила - уменьшаться, тело тормозится, вновь прилипает к поверхности, и придется затратить еще время, чтобы вновь растянуть пружину для преодоления трения покоя.
Таким образом, движение тела оказывается колебательным, в котором периодически сменяются фазы прилипания и скольжения (по-английски это звучит короче - stick and slip). Такое движение принято называть фрикционными автоколебаниями: фрикционными потому, что они порождены трением (friction), а авто потому, что они не навязаны извне какой-либо внешней колеблющейся силой, а являются внутренним свойством системы. Внешнее воздействие - движение конца троса не является колебательным, трос движется с постоянной скоростью. Конечно, через этот трос мы «подпитываем» тело энергией, поэтому-то колебания являются незатухающими, несмотря на потери энергии в контакте.
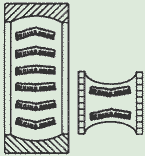
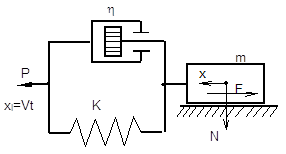 Причинами колебаний являются реологические свойства контакта, а также упругие свойства элементов пары трения и их связей с другими деталями. Главным проявлением реологии контакта является рост статической силы трения с увеличением времени неподвижного контакта и скачкообразное падение силы трения при переходе от покоя к движению, а затем падение силы трения с ростом скорости скольжения, вызванное, главным образом, скачком температуры на пятнах контакта. Динамическая модель такой системы изображена на рисунке:
Причинами колебаний являются реологические свойства контакта, а также упругие свойства элементов пары трения и их связей с другими деталями. Главным проявлением реологии контакта является рост статической силы трения с увеличением времени неподвижного контакта и скачкообразное падение силы трения при переходе от покоя к движению, а затем падение силы трения с ростом скорости скольжения, вызванное, главным образом, скачком температуры на пятнах контакта. Динамическая модель такой системы изображена на рисунке:
Схема модели фрикционных автоколебаний.
Фрикционные автоколебания - крайне нежелательный эффект в технике. Для многих машин требуется обеспечить плавное, без толчков, медленное движение. Сварочный робот должен плавно вести сварочный аппарат вдоль свариваемого шва: если возникнут колебания, то в одном месте будет перегрев и свариваемые пластины деформируются, а в другом сварка не осуществится вовсе, аппарат его проскочит. А ведь робот - это механизм, в узлах которого обязательно возникает трение. При работе разных механизмов часто возникают колебания, связанные с трением. Они приводят к появлению скрипов, которые проявляются при движении (скрип колес, тормозов, скрип протекторов автомобилей, когда машина идет юзом и др.).
Обрисованная картина указывает и на два главных пути уменьшения трения: улучшить качество обработки поверхностей, чтобы уменьшить пики, а тем самым силу страгивания, или обеспечить возможно лучший доступ смазки и сохранность поверхностного слоя. Это самые важные пути, и они предназначены не только для борьбы за плавность хода, но прежде всего для борьбы с ненужными потерями энергии в скользящих контактах. Поиском эффективных видов смазочных материалов и способов их подвода к скользящим поверхностям занимается большое количество специалистов. В зависимости от уровня гашения колебания могут существовать либо не возникать вовсе. От этого зависит устойчивость, надежность и долговечность механических систем, что необходимо учитывать при проектировании механизмов и замене деталей при ремонте и техобслуживании.
Похожие работы
... к началу обучения, соотношение с качествами личности молодого специалиста, – является первоосновой количества и качества работы ВУЗа по организации воспитывающего обучения (профессионального обучения, формирования творческого потенциала личности, ответа на вопросы о том, чему учить и как учить). Опираясь на приведенные выше базовые положения, естественнонаучные закономерности развития творческих ...
... перевода машин и механизмов на использование более чистых источников энергии (солнечной, водородной, электрической); повышение знаний инженеров и обслуживающего персонала в области триботехники, а также взаимосвязи триботехнических показателей с экономикой и экологией. Проблемы технического обновления различных отраслей машиностроения Ушедший в историю 20 век не освободил ...
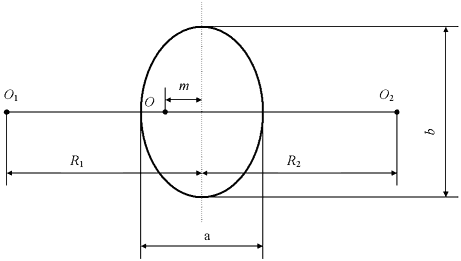
... [1], при фиксированных Fn (нажим в контакте) и f, именно значение β определяет величину Ft, а, следовательно, и момент на выходном валу. Влияние пассивной адаптивности можно определить из рассмотрения зоны фрикционного контакта ведущего и ведомого тел качения вариатора (рис.1). Рис. 1. Зона фрикционного контакта ведущего и ведомого тел качения вариатора Центры О1 и О2 а также, радиусы ...

... и заклиниванием тел качения; вмятины на дорожках качения подшипников с шагом, равным расстоянию между телами качения; вмятины на дорожках качения двухрядных сферических, устанавливаемых в опоры универсальных шарниров; скалывание рабочих бортов внутренних колец радиальноупорных шарикоподшипников с углом контакта 300; глубокие вмятины в зоне контакта в одном ряду тел качения сферических двухрядных ...
0 комментариев