Реферат
тема: «Спутниковые системы местоопределения»
ОглавлениеОглавление
1. Введение
2. Спутниковые системы радиоместоопределения.
2.1 Исторический экскурс
3. Система местоопределения, использующая специализированную спутниковую радионавигационную систему.
4. Система местоопределения, использующая геостационарные спутники связи.
5. Глобальная навигационная спутниковая система
ГЛОНАСС-М.
6. Система Глобального Позиционирования (GPS)
5.1 GPS в деталях
7. Сравнение GPS и ГЛОНАСС
8. Последние новости GPS
8.1 Модернизация GPS - новые сигналы для гражданских пользователей
8.2 Отмена селективного доступа
9. Приёмники GPS
9.1 Приёмники GPS индивидуального пользования
10. Новости ГЛОНАСС
10.1 Китай собирается сотрудничать с Россией в деле эксплуатации и развития системы ГЛОНАСС
11. Перспективы развития ГЛОНАСС
12. ГЛОССАРИй
ЛИТЕРАТУРА
1. ВведениеВ сферу телекоммуникаций в настоящее время инвестировано 450 млрд. $ США. За фармацевтической и энергетической промышленностью связь занимает третье место в мировой шкале инвестиций, опережая химию и автомобилестроение. По оценкам братьев Салимон эти инвестиции возрастут до 2003 г. больше чем на 50%, достигнув 685 млрд. $ США. Возможно, одним из наиболее впечатляющих по своим масштабам итогов деятельности человечества в 20 столетии стало создание глобальных космических систем. В частности создание систем радиоместоопределения и телекоммуникации. Эти системы огромны как по своей стоимости реализации, так и по своими возможностям и масштабам. На создание системы связи Iridium уже было затрачено около 7 млрд. $ США, а на создание системы Globalstar 4 млрд. $. Однако они стали реальностью нашей жизни. Глобальные навигационные системы GPS и ГЛОНАСС были не только развернуты, но и опробованы в гражданском и боевом применении, функционирует целый ряд систем спутниковой связи использующих, как геостационарные, так и низколетящие спутники. Исторически развитие космических систем связи и навигации началось параллельно. Хотя в навигационных системах присутствовали служебные комплексы связи, но они не являлись системами связи массового обслуживания и играли обеспечивающую жизнедеятельность системы роль. В то же время на системы космической связи в начале их развития не возлагались функции измерения координат, хотя они нуждались в баллистическом обеспечении и следовательно в решении задачи определения местоположения ретрансляторов. То есть решение задач местоопределения в системах связи носило характер обеспечения их функционирования. Однако довольно быстро стало ясно, что для решения задачи управления и связи с подвижными объектами необходимо знание координат объектов. Возможности совмещения услуг местоопределения и связи нашло применение в обслуживании транспортных сухопутных перевозок, породив целое направление – телематику. Одновременно возможность измерения и передачи координат подвижных объектов давала возможность создания нового класса систем – систем глобального аварийного оповещения.
Современное поколение космических систем связи настолько тесно интегрирует в себя сервис координатометрии, что принципиально использует его в алгоритмах системы автоматизированного управления связью (АСУС) и тарификации. Относительно требований к точности определения координат, существуют требования Международной Морской Организацией (ИМО) сформулированные в 1983 г. в Резолюции А.529(13), содержащей стандарты точности судовождения удовлетворяющие нужды общей
навигации. При этом районы плавания для судов, следующих со скоростью до 30 узлов подразделяются на две основные зоны: открытое море и прибрежные районы и подходы к портам и портовые воды в которых ограничена свобода маневрирования судов.
В первой зоне точность судовождения должна быть не хуже 4% от расстояния до ближайшей навигационной опасности, с максимумом в 4 мили при наибольшем допустимом интервале времени от момента последнего местоопределения.
Во второй зоне точность регламентируется принятой в 1995г. Резолюцией ИМО А.815(19) по Всемирной Радионавигационной Системе (ВРНС) и эта точность не должна быть хуже 10 м с вероятностью 95%.
Информация о местоположении судна должна обновляться с интервалом не более 10 с. Однако, если информация о местоположении судна используется для непосредственного управления судном, или в электронных картах судовых электронных картографических систем, то в этих случаях обновление информации должно осуществляться с интервалом не более 2 с. Поэтому стали развиваться системы сочетающие возможность определения координат подвижных объектов и организации связи между ними. Первыми такими системами стали система OmniTracs и система Коспас-Сарсат действующие и в настоящее время. Первая предназначена для связи с подвижными объектами и определения их координат, вторая для аварийного оповещения. Поскольку в системах аварийного оповещения связная часть играет подчиненную роль, призванную обеспечить доставку сигнала и координат места бедствия далее будем рассматривать системы связи предоставляющие возможности местоопределения.
С технической точки зрения созданные системы радиоместоопределения Глонасс и GPS являются уникальными научно-техническими комплексами, обеспечивающими в настоящее время наибольшую точность глобальной временной и координатной привязки абонентов. Однако это стало возможным благодаря применению в бортовых радиотехнических комплексах ИСЗ наиболее передовых достижений в области квантовых стандартов частоты и созданию соответствующих систем баллистического обеспечения. Применяемые в настоящее время в этих системах радиосигналы обеспечивают необходимый уровень предельной точности проведения измерений координат.
2. Спутниковые системы радиоместоопределения.
Спутниковые системы радиоместоопределения - сравнительно новая, быстро развивающаяся ветвь навигации или отслеживания перемещения подвижных объектов.
2.1 Исторический экскурсРазвитие отечественной спутниковой радионавигационной системы (СРНС) ГЛОНАСС имеет уже практически сорокалетнюю историю, начало которой положено, как чаще всего считают, запуском 4 октября 1957 г. в Советском Союзе первого в истории человечества искусственного спутника Земли (ИСЗ). Измерения доплеровского сдвига частоты передатчика этого ИСЗ на пункте наблюдения с известными координатами позволили определить параметры движения этого спутника.
Эффект Допплера (по имени австрийского физика К. Допплера) состоит в изменении регистрируемой приемником частоты колебаний или длины волны при относительном движении приемника и источника этих колебаний.
Обратная задача была очевидной: по измерениям того же доплеровского сдвига при известных координатах ИСЗ найти координаты пункта наблюдения.
Научные основы низкоорбитальных СРНС были существенно развиты в процессе выполнения исследований по теме "Спутник" (1958—1959 гг.). Основное внимание при этом уделялось вопросам повышения точности навигационных определений, обеспечения глобальности, круглосуточности применения и независимости от погодных условий.
Проведенные работы позволили перейти в 1963 г. к опытно-конструкторским работам над первой отечественной низкоорбитальной системой, получившей в дальнейшем название "Цикада".
В 1979 г. была сдана в эксплуатацию навигационная система 1-го поколения "Цикада" в составе 4-х навигационных спутников (НС), выведенных на круговые орбиты высотой 1000 км, наклонением 83° и равномерным распределением плоскостей орбит вдоль экватора. Она позволяет потребителю в среднем через каждые полтора-два часа входить в радиоконтакт с одним из НС и определять плановые координаты своего места при продолжительности навигационного сеанса до 5 ... 6 мин.
В ходе испытаний было установлено, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутниками собственных эфемерид, которые определяются и закладываются на спутники средствами наземного комплекса управления. Поэтому наряду с совершенствованием бортовых систем спутника и корабельной приемоиндикаторной аппаратуры, разработчиками системы серьезное внимание было уделено вопросам повышения точности определения и прогнозирования параметров орбит навигационных спутников.
Была отработана специальная схема проведения измерений параметров орбит средствами наземно-комплексного управления, разработаны методики прогнозирования, учитывающие все гармоники в разложении геопотенциала.
Проведены работы по уточнению координат измерительных средств и вычислению коэффициентов согласующей модели геопотенциала, предназначенной специально для определения и прогнозирования параметров навигационных орбит. В результате точность передаваемых в составе навигационного сигнала собственных эфемерид была повышена практически на порядок и составляет в настоящее время на интервале суточного прогноза величину » 70 ... 80 м, а среднеквадратическая погрешность определения морскими судами своего местоположения уменьшилась до 80 ... 100 м.
ЭФЕМЕРИДЫ (в астрономии) - координаты небесных светил, параметры орбит спутников и другие переменные астрономические величины, вычисленные для ряда последовательных моментов времени и сведенные в таблицы.
Для оснащения широкого класса морских потребителей разработаны и серийно изготавливаются комплектации приемоиндикаторной аппаратуры "Шхуна" и "Челн". В дальнейшем спутники системы "Цикада" были дооборудованы приемной измерительной аппаратурой обнаружения терпящих бедствие объектов, которые оснащаются специальными радиобуями, излучающими сигналы бедствия на частотах 121 и 406 Мгц. Эти сигналы принимаются спутниками системы "Цикада" и ретранслируются на специальные наземные станции, где производится вычисление точных координат аварийных объектов (судов, самолетов и др.).
Дооснащенные аппаратурой обнаружения терпящих бедствие спутники "Цикада" образуют системы "Коспас". Совместно с американо-франко-канадской системой "Сарсат" они образуют единую службу поиска и спасения, на счету которой уже несколько тысяч спасенных жизней.
Успешная эксплуатация низкоорбитальных спутниковых навигационных систем морскими потребителями привлекла широкое внимание к спутниковой навигации. Возникла необходимость создания универсальной навигационной системы, удовлетворяющей требованиям всех потенциальных потребителей: авиации, морского флота, наземных транспортных средств и космических кораблей.
В 1995 г. было завершено развертывание СРНС ГЛОНАСС до ее штатного состава (24 НС). В настоящее время предпринимаются большие усилия по поддержанию группировки. Разработаны самолетная аппаратура АСН-16, СНС-85, АСН-21, наземная аппаратура АСН-15 (РИРВ), морская аппаратура "Шкипер" и "Репер" (РНИИ КП) и др.
Основным заказчиком и ответственным за испытания и управление системами являются Военно-космические силы РФ.
В рассматриваемый период времени в США также проведены интенсивные разработки СРНС. В 1958 г. в рамках создания первого поколения атомных ракетных подводных лодок "Полярис" была создана система "Транзит" (аналог СРНС "Цикада"), введенная в строй в 1964 г.
В начале 70-х годов начаты работы по созданию СРНС второго поколения — ОР5/"Навстар" (аналога отечественной системы ГЛОНАСС). Спутниковая радионавигационная система GPS полностью развернута в 1993.
В данном реферате рассматриваются системы радиоместоопределения (в дальнейшем - местоопределения), задачей которых является контроль за перемещением подвижных объектов в центре сбора информации о местоположении и движении объектов или, как иногда это называют, сопровождение подвижных объектов.
Спутниковые системы местоопределения подвижных объектов базируются на использовании радиолиний, обеспечивающих передачу сигналов между подвижным объектом, искусственным спутником Земли (ИСЗ) и наземной станцией, При этом подвижный объект, ИСЗ и наземная станция оснащаются радиотехническим оборудованием в зависимости от используемой конфигурации системы и метода определения координат объекта. Далее будут рассмотрены три наиболее распространенных типа конфигурации систем местоопределения.
3. Система местоопределения, использующая специализированную спутниковую радионавигационную систему.Спутниковой радионавигационной системой принято называть систему, в которой группировка ИСЗ выполняет роль опорных радионавигационных точек. К числу таких систем относятся NAVSTAR (США) и "Глонасс" (Россия). NAVSTAR (NAVigation System using Timing And Ranging) или GPS (Global Positioning System)
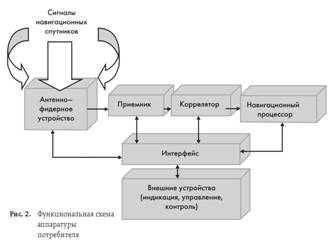
Эти системы относятся к категории пассивных систем с самоопределением. В них радиопередатчик имеется только на навигационных ИСЗ, а аппаратура, размещаемая на подвижном объекте, имеет только приемник сигналов ИСЗ, устройство обработки сигналов и вычисления координат объекта. В данных навигационных системах результаты вычисления координат объекта имеются только на самом объекте, т.е. аппаратура объекта сама определяет свои координаты. Общепринятое название этой аппаратуры -- аппаратура потребителя спутниковой навигации (АПСН).
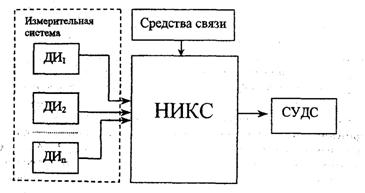
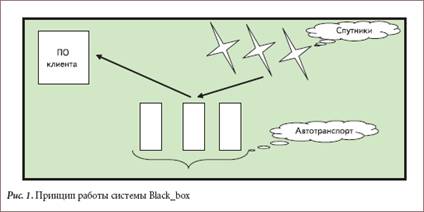
Схема построения системы радиоместоопределения и сопровождения подвижных объектов на основе спутниковой радионавигационной системы представлена на Рис. 1.
|
Аппаратура, устанавливаемая на подвижном объекте -- аппаратура потребителя, осуществляет прием на направленную антенну навигационных сигналов одновременно от нескольких ИСЗ (не менее 4-х), находящихся в зоне видимости. По поступающей от ИСЗ кодовой информации о параметрах излучаемого со спутника сигнала, а также данных об орбитальных параметрах движения ИСЗ (эфемеридная информация) в ЭВМ аппаратуры потребителя по заложенным алгоритмам определяются географические координаты подвижного объекта, скорость и направление движения.
Данные о координатах и скорости подвижного объекта могут представляться потребителю в визуальной форме на табло и запоминаются с регистрацией времени измерения.
Для передачи навигационных параметров подвижного объекта в центр сбора данных на подвижном объекте используется отдельный канал связи подвижной спутниковой службы (ПСС). В данной схеме указан канал спутниковой связи подвижного объекта с наземной станцией центра сбора через геостационарный спутник связи (ГСС). Сеанс измерения навигационных параметров и их передача от подвижного объекта включается по запросу из центра сбора При этом не требуется вмешательства оператора на подвижном объекте.
Глобальная спутниковая радионавигационная система NAVSTAR (NAV igation System using Timing And Ranging) или GPS (Global Positioning System) создана для высокоточного навигационно-временного обеспечения объектов, движущихся в космосе, воздухе, на земле и в воде.
В ее состав входят навигационные спутники, наземный комплекс управления и аппаратура потребителей (пользователей). Применяемый в системе принцип состоит в том, что специальные приемники, установленные у потребителей, измеряют дальности до нескольких спутников и определяют свои координаты по точкам пересечения поверхностей равного удаления. Величина временной задержки определяется сопоставлением кодов сигналов, излучаемых спутником и генерируемых приемным устройством, методом временного сдвига до их совпадения Временной сдвиг определяется по часам приемника. Для нахождения широты, долготы, высоты и исключения ошибок в определении временного сдвига, приемник пользователя должен “видеть” и принимать навигационные сигналы от четырех спутников.
Скорость определяется по доплеровскому сдвигу несущей частоты сигнала спутника, вызываемому движением пользователя. Доплеровский сдвиг замеряется при сопоставлении частот сигналов, принимаемых от спутника и генерируемых приемником.
Навигационные сигналы излучаются на двух частотах L-диапазона (L-band, полосы радиочастот от 390 до 1550 МГц); 1575,42 МГц (L1) и 1227,6 МГц (L2). На L2 излучаются сигналы с военным кодом P(Y) с высокоточной информацией и защищенным от имитационных помех.
P-код представляет из себя последовательность псевдослучайных бистабильных манипуляций фазы несущей частоты с частотой следования ,равной 10,23 МГц и периодом повторения в 267 суток. Каждый недельный сегмент этого кода является уникальным для одного из спутников GPS и непрерывно генерируется им в течение каждой недели, начиная с ночи с субботы на воскресенье. На L1 излучаются сигналы и с военным кодом P(Y) и с общедоступным гражданским кодом, который часто называют C/A. Прием сигналов по коду P(Y) обеспечивает работу с высокой точностью измерений. Сравнение времени прихода сигналов на частотах L1 и L2 позволяет вычислить дополнительную задержку, возникающую при прохождении радиоволн через ионосферу, что значительно повышает точность измерений навигационных данных.
Прием сигналов на частоте L1 с кодом C/A не позволяет определить ошибки, вносимые ионосферой. Структура кода C/A обеспечивает худшие характеристики в режиме SPS (стандартная точность измерений). Так, если в режиме PPS с вероятностью 0,95 ошибки измерения долготы и широты не превышают 22-23 метра, высоты - 27-28 метров и времени - 0,09 мкс, то в SPS они увеличиваются соответственно до 100 метров, 140 метров и 0,34 мкс. Первоначально режим SPS был необходим для грубого определения пользователями своих координат для вхождения в код P(Y). В настоящее время уровень электроники программного обеспечения и методов обработки навигационной информации позволяет осуществлять достаточно быстрый захват P(Y) без кода С/А, а также проводить высокоточные определения по фазе несущей сигнала. Кроме того, полностью отработанный наземный автоматический режим дифференциальной коррекции позволяет в ограниченном регионе получать точное определение относительных координат взаимного расположения двух приемников, отслеживающих сигналы одних и тех же ИСЗ GPS. При использовании гражданского C/A- кода определяют координаты автомобиля с точностью от 2 до 5 метров.
28 марта 1994 года система GPS начала функционировать в штатной конфигурации-24 КА в 6 орбитальных плоскостях. Запуском 17 января 1997 г, который закончился аварией, должен был начаться этап замены ИСЗ серий 2 и 2А новыми аппаратами 2R. Компания LOCKHEED MARTIN изготавливает 21 аппарат этой серии, которые планируется запустить до 2001 г.
Габаритные размеры корпуса ИСЗ - 1.52 м 1.93 м 1.91 м, размах солнечных батарей 19.3 м, площадь 13.4 кв. м. Мощность бортовой системы электропитания к концу срока эксплуатации 1136 Вт. Масса аппарата при запуске 2032 кг, на рабочей орбите 1075 кг. Навигационную аппаратуру поставляет ITT AEROSPASE/COMMUNICATIONS.
Новые спутники имеют трехосную стабилизацию и позволят обеспечить определение времени с точностью до 0.000001 сек, положение объекта с точностью до единиц метров и скорость - примерно до 0.1 м/сек. Срок службы увеличен до 10 лет по сравнению с 7 годами для ИСЗ типа 2А. Стоимость ИСЗ серии 2R составляет 40 млн. долл.
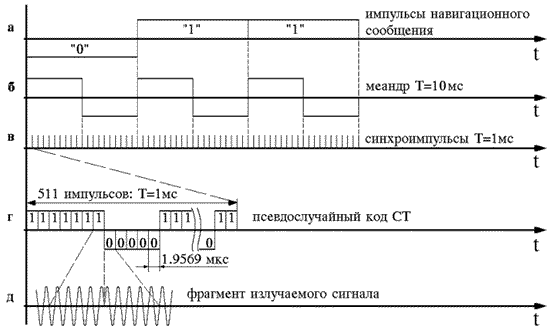
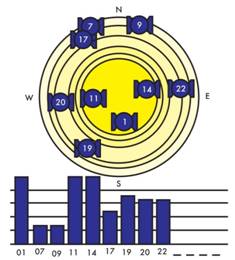
Группировка из 24 ИСЗ ГЛОНАСС выведена на орбиту и позволяет определить координаты с погрешностью не более 50 м для гражданского кода. Создан наземный сегмент управления спутниками, разработанный в СССР и реализованный Россией. В настоящее время в России отсутствует серийный производитель абонентской аппаратуры ГЛОНАСС для гражданского пользования. Структура орбитальной группировки и наблюдаемость ИСЗ системы даны в приложении.
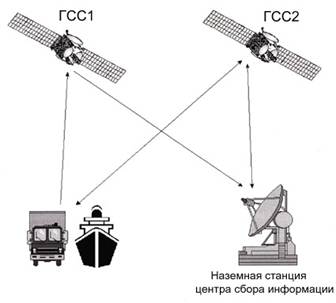
4. Система местоопределения, использующая геостационарные спутники связи.Широкое развитие спутниковой связи на основе геостационарных спутников, вращающихся на экваториальных орбитах с периодом 24 часа, позволили использовать эти спутники как неподвижные опорные радионавигационные точки для измерения относительно них координат подвижных объектов.
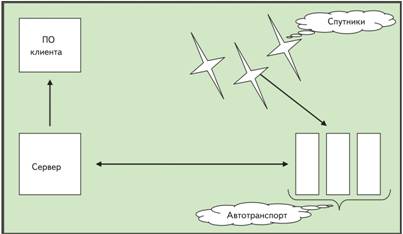
Схема построения системы местоопределения с двумя геостационарными спутниками связи представлена на Рис. 2. Примером таких систем могут служить системы EUTELTRACS (ECA) и GEOSTAR (США).

Спутники ГСС-1 и ГСС-2 не являются составной частью системы местоопределения, они выполняют роль ретрансляторов сигналов в линии радиосвязи между наземной станцией центра сбора и аппаратурой подвижного объекта.
При этом ГСС-1 обеспечивает ретрансляцию сигналов от наземной станции к подвижному объекту и обратно, а ГСС-2 только от подвижного объекта к наземной станции.
Координаты подвижного объекта вычисляются на наземной станции по сигналам, полученным от подвижного объекта с двух направлений (от ГСС-1 и ГСС-2). система четырех объектов, в которой координаты трех объектов ГСС-1, ГСС-2 и наземной станции известны, позволяет по методу триангуляции рассчитать координаты четвертого объекта, если измерить дальности от подвижного объекта до ГСС-1 и ГСС-2. Приближенно это можно представить следующим образом. Если измерены дальности от ГСС-1 и ГСС-2 до объекта L1 и L2, то подвижный объект находится на линии пересечения двух сфер, описанных радиусом L1 с центром на ГСС-1 и радиусом L2 с центром на ГСС-2. Пересечение же этой линии с поверхностью Земли даст точку местоположения подвижного объекта.
Значения L1 и L2 определяются вычитанием из известных расстояний от наземной станции до ГСС-1 и ГСС-2 дальностей от наземной станции до подвижного объекта через ГСС-1 и ГСС-2 соответственно. Эти дальности определяются на наземной станции по временной задержке между запросным сигналом от наземной станции и ответными сигналами от подвижного объекта, принимаемыми через ГСС-1 и ГСС-2.
Полученные на наземной станции координаты подвижного объекта могут быть переданы ему по каналу связи через ГСС-1.
Аппаратура каждого подвижного объекта имеет свой код, что позволяет наземной станции устанавливать связи одновременно со всеми объектами, с группой или с одним.
В нормальном состоянии аппаратура на подвижном объекте находится в пассивном режиме (прием сигналов от наземной станции). Активизация (включение передатчика) аппаратуры осуществляется по запросу от наземной станции.
Наземная станция и центр сбора могут быть совмещены или соединены между собой отдельным каналом связи (радиорелейным, телефонным, спутниковым).
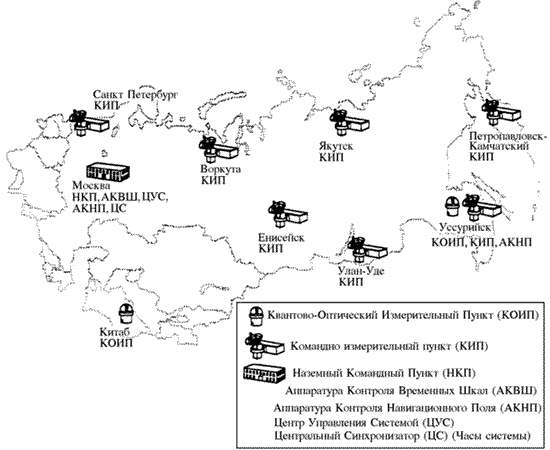
5. Глобальная навигационная спутниковая система
 |
ГЛОНАСС-М.
|
Назначение:
Обеспечение навигационной информацией и сигналами точного времени военных и гражданских наземных, морских, воздушных и космических потребителей.
С 1996 года по предложению Правительства Российской Федерации Международная организация гражданской авиации и Международная морская организации используют систему ГЛОНАСС вместе с системой GPS (США) в качестве международных.
Характеристики:
| Зона обслуживания | Глобально по поверхности Земли в воздушном и околоземном космическом пространстве |
| Возможность использования | В любой момент, независимо от времени суток, года и метеоусловий |
| Точность навигационных определений (вероятность 0,95): в стандартном режиме: | |
| - по плановым координатам | » 20 м |
| - по высоте | » 30 м |
| - по скорости | 5 м/с |
| - по времени привязки к Госэталону | 0,7 мкс |
| в дифференциальном режиме | от 0,1 м до 5 м |
| Доступность | 99,64% |
| Количество КА в орбитальной группировке | 24 (по 8 КА в трех плоскостях) |
| Орбита | круговая |
| - высота | 19140 км |
| - наклонение | 64,8° |
| Частотный диапазон | » 1,6 ГГц |
| - частота L1 | » 1,2 ГГц |
| Гарантированный срок функционирования КА | 7 лет |
| Средства выведения: | |
| - одиночный запуск с к. Плесецк | РН "Союз-2" и РБ "Фрегат" |
| - групповой запуск (3 КА) с к. Байконур | РН "Протон" и РБ "Бриз-М" |
6. Система Глобального Позиционирования (GPS)
Global Positioning System (GPS) - спутниковая система определения местонахождения подвижных объектов.
Система GPS создана министерством обороны США и позволяет с точностью до 20 м определять в любой точке земного шара место нахождения неподвижного либо движущегося объекта на земле, в воздухе и на море в трех измерениях с очень высокой точностью. Более того, GPS сообщает скорость передвижения объекта. Эта система позволяет оснастить речные и морские суда, автомобили, самолеты электронными картами, на которых показывается место нахождения объекта и кратчайший (либо наиболее удобный) путь к пункту назначения. GPS используется также для составления географических карт и в задачах геодезии. Система широко используется и гражданскими абонентами.
Система создана в спутниковой сети, образованной спутниками связи, вращающимися вокруг земли по высоким орбитам. В 1995 г. сеть имела 24 спутника. Для вхождения в GPS каждый абонент должен иметь небольшое устройство. Последнее в бытовом варианте имеет размер, равный портсигару, что позволяет носить его в кармане костюма. Устройство с высокой точностью показывает три координаты объекта, находящегося в любой точке планеты. Одним из важнейших компонентов устройства являются атомные часы, способные измерять время с точностью до наносекунды. Сигналы устройства синхронизируются с приемо-передатчиками спутников связи.
5.1 GPS в деталяхКроме высокой точности измерения координат своего местоположения и скорости различных подвижных объектов, а также определения времени, важными ее достоинствами являются непрерывность выдачи информации, всепогодность и скрытность.
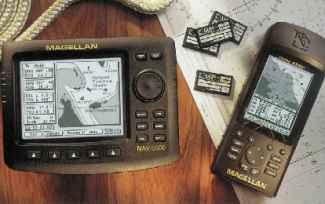
Сигналы, несущие навигационную информацию, излучаются на двух частотах: 1575,45 МГц (L1) и 1227,6 Мгц (L2). На второй частоте излучаются только сигналы с военным кодом P(Y), несущим высокоточную информацию (P — Precision, точный) и защищенным криптографическим методом от имитационных помех, о чем свидетельствует индекс Y. На первой частоте передаются сигналы как с кодом P(Y), так и общедоступным кодом C/A. Сигналы обоих кодов представляют собой псевдошумовую последовательность импульсов, с помощью которой осуществляется фазовая манипуляция несущей частоты. Военный код P(Y) имеет продолжительность 267 суток, а код С/А — 1 мс. Прием сигналов с кодом P(Y) дает возможность работы в режиме высокой точности измерений (PPS), а сравнение времени прихода сигналов на частотах L1 и L2 позволяет вычислять дополнительную задержку, возникающую при прохождении сигналов через ионосферу из-за нелинейности (увеличении пути) распространения в ней радиоволн.
Прием сигналов с кодом С/А только на одной частоте не дает возможности вычислять ошибки, вносимые при прохождении радиоволн через ионосферу. Кроме того, сама структура кода обеспечивает значительно худшие характеристики в режиме стандартной точности измерений (SPS). За счет преднамеренного ухудшения точности путем ввода ошибок при формировании навигационных параметров (режим избирательного доступа — SA) погрешность измерений в режиме SPS может быть доведена до 300 м и более.
Кроме кодов С/А и Р навигационные спутники регулярно передают специальные сообщения, которые содержат дополнительные сведения: о состоянии спутников и их параметрах — системном времени, эфемеридах (наборах параметров, точно описывающих орбиты спутников), прогнозе ионосферной задержки, показателях работоспособности. Передача навигационного сообщения длиной 1500 бит осуществляется со скоростью 50 бит/с на частотах L1 и L2. Для передачи полного сообщения обо всех спутниках требуется 12,5 минуты.
7. Сравнение GPS и ГЛОНАСССистемы GPS и ГЛОНАСС во многом подобны, но имеют и различия (что хорошо видно из таблицы А). Они разрабатывались с учетом наиболее вероятных областей применения. Поэтому ГЛОНАСС имеет преимущества на высоких широтах, а GPS — на средних.
Таблица A. Основные характеристики навигационных систем ГЛОНАСС и GPS
| Характеристки | ГЛОНАСС | GPS |
| Количество спутников (проектное) | 24 | 24 |
| Количество орбитальных плоскостей | 3 | 6 |
| Количество спутников в каждой плоскости | 8 | 4 |
| Тип орбиты | Круговая (S=0+-0,01) | Круговая |
| Высота орбиты | 19100 км | 20200 км |
| Наклонение орбиты, град | 64,8+-0,3 | 55 (63) |
| Период обращения | 11 ч 15,7 мин. | 11 ч 56,9 мин. |
| Способ разделения сигналов | Частотный | Кодовый |
| Навигационные частоты, МГц: | 1602,56 — 1615,5 | 1575,42 |
| Период повторения ПСП | 1 мс | 1 мс (С/А-код) |
| Тактовая частота ПСП, МГц | 0,511 | 1,023 (С/А-код) |
| Скорость передачи цифровой информации, бит/с | 50 | 50 |
| Длительность суперкадра, мин | 2,5 | 12,5 |
| Число кадров в суперкадре | 5 | 25 |
| Число строк в кадре | 15 | 5 |
| Погрешность* определения координат в режиме ограниченного доступа: | не указана | 18 (P,Y-код) |
| Погрешности* определения проекций линейной скорости, см/с | 15 (СТ-код) | <200 (С/А-код) |
| Погрешность* определения времени | 1000 (СТ-код) | 340 (С/А-код) |
| Система отсчета пространственных координат | ПЗ-90 | WGS-84 |
| * Погрешности в определении координат, скорости и времени для системы ГЛОНАСС — 0,997, для GPS — 0,95. | ||
Недостатками ГЛОНАСС являются:
необходимость сдвига диапазона частот вправо, так как в настоящее время ГЛОНАСС мешает работе как подвижной спутниковой связи, так и радиоастрономии;
при смене эфемерид спутников, погрешности координат в обычном режиме увеличиваются на 25—30м, а в дифференциальном режиме — превышают 10 м;
при коррекции набежавшей секунды нарушается непрерывность сигнала ГЛОНАСС. Это приводит к большим погрешностям определения координат места потребителя, что недопустимо для гражданской авиации;
сложность пересчета данных систем ГЛОНАСС и GPS из-за отсутствия официально опубликованной матрицы перехода между используемыми системами координат.
Приемники, одновременно работающие с сигналами ИСЗ GPS и ГЛОНАСС, в Украине изготавливаются на ГП «Оризон» (г. Смела).
8. Последние новости GPS 8.1 Модернизация GPS - новые сигналы для гражданских пользователей
25 января 1999г. вице-президент США Альберт Гор заявил о выделении 400 млн. долларов из “президентского” бюджета на модернизацию GPS и введении двух новых “гражданских” сигналов на запускаемых в будущем спутниках.
Второй "гражданский" сигнал будет размещен на существующей частоте L2 (1227.6MHz), вместе с существующим “военным” сигналом. Он будет предназначен для использования в приложениях (геодезия и т.д.), не связанных непосредственно с опасностью для жизни людей. Наличие этого сигнала предусматривается на спутниках, запускаемых с 2003 года.
Третий "гражданский" сигнал будет расположен на частоте 1176.45MHz внутри диапазона международного радионавигационного сервиса для авиации и мореплавания. Он предназначен для использования в приложениях, имеющих повышенные требования к безопасности (гражданская авиация и др.). Наличие этого сигнала предусматривается на спутниках, запускаемых с 2005 года.
Два новых "гражданских" сигнала в совокупности с существующим на частоте L1 (1575.42 MHz) существенно расширят возможности GPS.
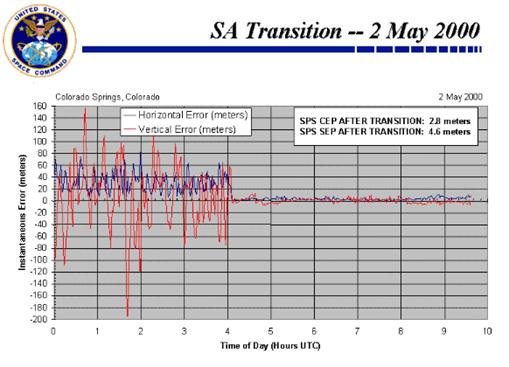
8.2 Отмена селективного доступа1 мая 2000 года Президент США объявил о прекращении с 0:00 часов 2 мая 2000 года (время Восточного побережья США) действия так называемого “селективного доступа” (Selective Availability или S/A) – преднамеренного “загрубления” сигналов спутников GPS-Navstar Министерством Обороны США, не позволяющего пользователю, не имеющему специальных полномочий, определять свое местоположение точнее 100 метров.
Это решение, а также прошлогоднее заявление вице-президента США Альберта Гора о введении двух новых “гражданских” сигналов на запускаемых в будущем спутниках является реализацией решения Президента США, принятого в марте 1996 года о расширении использования GPS в гражданских целях.
Отмена действия S/A позволит в несколько раз улучшить точность автономного местоопределения – по данным Национальной Геодезической Службы США до 20, а возможно до 10 метров.
Приведенные ниже рисунки иллюстрируют точность GPS при действующем и отключенном S/A.

 На рисунках – данные наблюдений с 7:30 до 14:00 UTC 2 мая этого года (до и после отключения S/A) на одной из CORS станций, подведомственных Службе Береговой Охраны США в штате Теннеси и данные одной из станций US Space Command.
На рисунках – данные наблюдений с 7:30 до 14:00 UTC 2 мая этого года (до и после отключения S/A) на одной из CORS станций, подведомственных Службе Береговой Охраны США в штате Теннеси и данные одной из станций US Space Command.
S/A ON S/A OFF

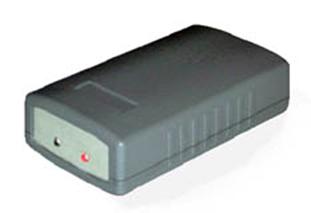
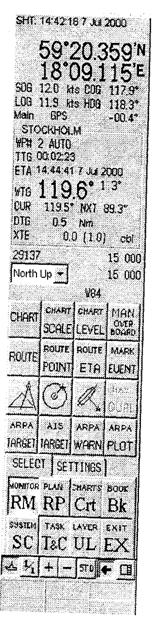
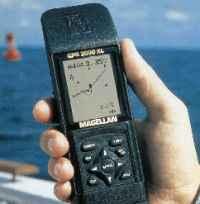 Наиболее распространенными являются приемники СРНС для индивидуального пользования водителями автомобильного транспорта. Они имеют размер карманного калькулятора с клавиатурой и жидкокристаллическим дисплеем, на котором отображаются координаты пользователя, курс, расстояние и направление до контрольных точек маршрута, пройденный маршрут движения, карта местности, параметры видимых спутников (рис. 6).
Наиболее распространенными являются приемники СРНС для индивидуального пользования водителями автомобильного транспорта. Они имеют размер карманного калькулятора с клавиатурой и жидкокристаллическим дисплеем, на котором отображаются координаты пользователя, курс, расстояние и направление до контрольных точек маршрута, пройденный маршрут движения, карта местности, параметры видимых спутников (рис. 6).
 Стоимость такого приемника колеблется от 100 до 1000 долларов.
Стоимость такого приемника колеблется от 100 до 1000 долларов.
Для индивидуального пользования разработаны также устройства, которые представляют собой специальные портативные компьютеры с навигационной программой и цифровой картой, текущий фрагмент которой высвечивается на миниатюрном ЖК-дисплее. Примером могут служить приборы «CARIN» — Car Information and Navigation (Philips), «Travelpilot» (Bosch) и др. Это, по сути, электронные лоцманы, дающие указания водителю синтезированным голосом, заранее сообщая обо всех поворотах, стоянках и прочих особенностях данного маршрута.
Для точного определения своего местонахождения компьютер получает информацию от трех источников: от GPS-приемника, от электронного компаса и от датчиков пройденного пути, установленных на колесах. В считанные секунды с момента включения зажигания (и питания) система определяет свое местонахождение с точностью +/- 100 м, а затем, используя базу данных в CD-ROM, уточняет его до +/- 10 м. Достаточно указать с помощью специальных символов на дисплее конец маршрута, и через 5 секунд компьютер выдаст оптимальную траекторию движения.
Наибольшее распространение эти системы получили в европейских странах, где почти для любой местности составлены электронные цифровые карты. Диапазон цен на это оборудование простирается от 1500 до 7500 DM. Но есть и более доступные по цене навигационные приборы, например «Филипс-Рутфайндер», которые по внешнему виду напоминают электронную записную книжку и стоят около 500 DM. Вводя с клавиатуры исходный пункт и место назначения, пользователь менее чем за минуту получает детальное описание маршрута, длительность пути, время прибытия в конечный пункт и другие параметры. База данных для вычислений хранится на магнитной карточке, которая вставляется в считывающее устройство «Рутфайндера». Этим прибором можно пользоваться даже при пеших прогулках по незнакомому городу (рис. 7).
|
10. Новости ГЛОНАСС
10.1 Китай собирается сотрудничать с Россией в деле эксплуатации и развития системы ГЛОНАСС
Во время визита премьер-министра России Михаила Касьянова в Пекин, который состоялся в конце октября - начале ноября 2000 г., был подписан договор о сотрудничестве между Россией и Китаем в области эксплуатации и развития российской глобальной навигационной спутниковой системы ГЛОНАСС. Китай проявил интерес к установки терминалов этой системы на своих самолетах и в аэропортах.
Эта навигационная система является аналогом американской системы глобального позиционирования GPS. Она предназначается для определения точного положения и скорости движения объекта, расположенного в любой точке земного шара. В законченном виде система ГЛОНАСС должна будет состоять из 24 спутников. Сейчас на орбите находятся 14 спутников, но только 9 из них находятся в рабочем состоянии. Для полноценной эксплуатации системы требуется 1,5 млрд рублей в год.
11. Перспективы развития ГЛОНАССВ настоящее время на базе системы ГЛОНАСС предполагается создание Единой глобальной системы координатно-временного обеспечения (ЕС КВО). Кроме спутниковой системы, ЕС КВО включает:
ü Государственную систему Единого времени с эталонной базой страны;
ü Государственную систему и службу определения параметров вращения Земли;
ü систему наземной и заатмосферной оптической астрометрии;
ü космическую геодезическую систему и др.
Считается, что возможности существенного повышения точности навигационных определений связаны с созданием глобальной системы отсчета, использующей самоопределяющиеся навигационно-геодезические КА без привлечения измерений с поверхности Земли.
При разработке направлений и путей совершенствования системы учитывается постоянный рост требований пользователей к точности навигационных определений и целостности системы. При этом под целостностью в данном случае понимается способность самой системы обеспечивать предупреждение пользователей о тех моментах времени, когда система не должна использоваться для навигационных определений. Одним из важнейших путей решения этой проблемы является интеграция двух спутниковых радионавигационных систем - ГЛОНАСС и GPS.
Можно выделить четыре основных направления модернизации СРНС ГЛОНАСС:
1) улучшение совместимости с другими радиотехническими системами;
2) повышение точности навигационных определений и улучшение сервиса, предоставляемого пользователям;
3) повышение надежности и срока службы бортовой аппаратуры спутников и улучшение целостности системы;
4) развитие дифференциальной подсистемы.
Одним из элементов первого направления является уже упоминавшееся сокращение и смещение занимаемого диапазона частот. К настоящему времени находящиеся в эксплуатации КА уже полностью прекратили передачу радиосигналов в полосе 1610.6...1613.8 МГц диапазона L1 (литера частот k=16...20), используемой при радиоастрономических исследованиях. В дальнейшем КА "Ураган", уже находящиеся на орбите, будут использовать литеры частот k=0...12, 22...24, а литеры частот 13, 14 и 21 будут иметь ограниченное применение: после запуска КА на этапе ввода в эксплуатацию, а также при проведении профилактических работ. Литер k=0 потребителями системы не используется и служит для проверки находящихся на орбите резервных спутников.
На втором этапе, с началом запуска модернизированных КА "Ураган-М", излучение сигналов с борта КА будет осуществляться только на несущих частотах с литерами k=0...12. Наконец, на третьем этапе (ориентировочно с 2005 г.) КА "Ураган-М" будут использовать для излучения навигационных сигналов несущие частоты с k = -7 ... 4, а несущие частоты с номиналом 5 и 6 будут использоваться только как технологические при работе спутников с НКУ.
С целью повышения точности навигационных определений потребителями на борту КА "Ураган-М" будет установлен новый цезиевый стандарт частоты. Кроме того, модернизированные КА будут излучать сигналы для гражданских пользователей в двух диапазонах волн L1 и L2, что позволит практически полностью исключить ионосферную погрешность измерений пользователям, оборудованным двухчастотными приемниками.
Совместное использование для навигации двух систем - ГЛОНАСС и GPS, дает пользователям дополнительные преимущества, главными из которых являются повышение достоверности навигационного определения за счет увеличения числа доступных КА в зоне радиовидимости потребителя. Целый ряд предпосылок существенно облегчает интеграцию двух систем, в частности, приводя лишь к незначительному усложнению и удорожанию комбинированных приемников ГЛОНАСС-GPS. К таким предпосылкам можно отнести:
· схожесть принципов синхронизации и измерения навигационных параметров;
· малое различие в используемых системах координат;
· близкий частотный диапазон;
· общность принципов баллистического построения;
· готовность правительств России и США предоставить системы для использования различными потребителями мирового сообщества.
Режим дифференциальной навигации основан на том, что большинство погрешностей СРНС во времени и в пространстве относительно постоянны. Следовательно, если одновременно с обработкой навигационных сигналов потребитель будет получать поправки к ним, характеризующие точность навигации в данном районе, то это, как показывает опыт, позволяет снизить погрешности определения координат и высоты до 5 м. Для обеспечения работы в таком режиме создаются дифференциальные подсистемы СРНС, которые подразделяются на широкозонные, региональные и локальные.
В России наиболее активно развивается последний тип дифференциальных подсистем.
К настоящему времени определились три основных класса локальных дифференциальных подсистем (ЛДПС) СРНС:
¨ морские, для обеспечения мореплавания в проливных зонах, узкостях и акваториях портов и гаваней в соответствии с требованиями Международной морской организации;
¨ авиационные, для обеспечения захода на посадку и посадки воздушных судов по категориям Международной организации гражданской авиации;
¨ локальные, для геодезических, землемерных и других специальных работ.
Предполагается, что сеть морских ЛДПС, работающих по сигналам систем ГЛОНАСС и GPS, будет охватывать все побережье России и акватории прилегающих морей. В настоящее время отдельные средства проходят предварительную проверку на Балтике.
К слову, имеются и весьма специфические применения ЛДПС СРНС, например, для контроля за перемещением машин инкассаторов.
Признавая, что КНС ГЛОНАСС является национальным достоянием России, распоряжением Президента РФ от 18.02.99 г. поручено Правительству РФ принять меры по безусловному сохранению и развитию КНС ГЛОНАСС и увеличению количества пользователей системы. Во исполнение этого распоряжения Правительство РФ в 22.03.99 г. приняло постановление, в котором определена ответственность федеральных органов исполнительной власти за поддержание и развитие КНС ГЛОНАСС и представлен "План первоочередных мероприятий по сохранению и развитию КНС ГЛОНАСС".
В соответствии с этим "Планом ..." разработана "Программа поддержания и развития КНС ГЛОНАСС на период до 2003 года", в которой предусматриваются мероприятия по безусловному сохранению КНС ГЛОНАСС, а так же ускоренное оснащение отечественного парка пользователей, работающих одновременно по сигналам от двух систем: ГЛОНАСС и GPS.
Программа развития космической навигации России базируется на следующих принципах:
Ø Модернизация КНС осуществляется поэтапно с учетом реальных возможностей промышленности и бюджетного финансирования;
Ø Государство гарантирует международному сообществу поддержание КНС с требуемыми характеристиками на период до 2010 г.;
Ø Разработка и эксплуатация системы учитывает возможность сотрудничества с другими странами в части координации использования КНС, внедрения передовых технологий, элементной базы;
Ø Навигационный сигнал КНС ГЛОНАСС сертифицирован на соответствие международным стандартам;
Ø Точностные характеристики КНС (СКО) в пределах 1 - 10 м обеспечиваются с применением дифференциального режима измерений, свыше 10 м в режиме прямой навигации;
Ø Выполнение требований по целостности и оперативному оповещению потребителей о состоянии системы осуществляется с помощью оперативного канала мониторинга целостности системы;
Долговременная программа развития КНС реализовывается по следующим укрупненным этапам.
Этап 1 (до 2003 г.). Поддержание КНС ГЛОНАСС на минимально допустимом уровне запусками КА «Глонасс», модернизация контура информационного обмена наземного комплекса управления, расширенное оснащение потребителей аппаратурой, работающей по сигналам двух систем: ГЛОНАСС и GPS. Разработка и создание КА "Глонасс-М" .
Этап 2 (до 2005 г.). Развертывание на базе КА "Глонасс-М" рабочей орбитальной группировки до 18 КА, переход в новый частотный диапазон навигационного сигнала. Отработка технологии эфемеридно-временного обеспечения с использованием межспутниковых измерений. Расширение номенклатуры и количества потребителей, работающих по сигналам КНС ГЛОНАСС и GPS. Разработка и создание маломассогабаритного КА "Глонасс-К".
Этап 3 (до 2010 г.). Развертывание штатной орбитальной группировки на базе маломассогабаритного КА "Глонасс-К". Расширение использования межспутниковой радиолинии для решения задач автономного эфемеридно-временного обеспечения, оперативного управления и контроля КА, обеспечения целостности. Создание наземной сети станций мониторинга КНС ГЛОНАСС и функциональных дополнений. Оснащение парка потребителей НАП, работающей по сигналам ГЛОНАСС, GPS, Galileo.
Сравнительные характеристики навигационных КА
| Наименование КА | "Глонасс" | "Глонасс-М" | "Глонасс-К" |
| 1. Решаемые задачи: | |||
| • излучение навигационного сигнала | + | + | + |
| • межспутниковые измерения | - | + | + |
| 2. Количество выводимых КА одновременно: | |||
| • РН «Протон», РБ ДМ/Бриз-М | 3 КА (ДМ) | 3 КА (Бриз-М) | 6 КА (Бриз-М) |
| • РН "Союз-2" (мод.1А), РБ "Фрегат" | - | 1КА | 2КА |
| 3. Гарантированный САС, лет | 3 | 7 | 10 и более |
| 4. Погрешность навигационных определений (план/высота), 3s | 50/70 | 15/25 | 15/25 |
| 5. Срок начала летных испытаний | 1982 | 2001 | 2004 |
В соответствии с Соглашением от 26 июня 1996 г. между Правительством РФ и ИКАО о предоставлении системы ГЛОНАСС для использования международному авиационному сообществу, ИКАО в 2000 г. завершает разработку стандартов и рекомендуемой практики, стандартизирующих использование системы ГЛОНАСС в составе глобальной навигационной спутниковой системы GNSS и до 2002 г. планирует скорректировать их в части использования системы ГЛОНАСС-М. Этим же Соглашением гарантируется поддержание характеристик системы ГЛОНАСС в течение не менее 15 лет.
Во исполнение Распоряжения Президента РФ от 18.02.99 г. (упомянуто выше) Правительство РФ выступило с Заявлением о предоставлении КНС ГЛОНАСС в качестве основы для создания и развития международных глобальных спутниковых систем.
НПО ПМ совместно с кооперацией основных изготовителей принимает участие в разработке международной навигационной системы GNSS-2. Проработаны вопросы по возможности размещения на КА "Глонасс-М" дополнительной полезной нагрузки (бортовая навигационная аппаратура европейской разработки), создания наземного комплекса мониторинга, определен облик перспективного навигационного аппарата. КА "Глонасс-К", разработанный НПО ПМ с учетом последних достижений науки и техники, предложен Европейскому сообществу в качестве космической платформы для международной навигационной системы GNSS-2.
12. ГЛОССАРИЙ
GPS (Global Positioning Systems) — глобальная система позиционирования.
ГЛОНАСС — глобальная навигационная спутниковая система.
SPS (Standard Positioning Service) — стандартная точность измерений.
PPS (Precise Positioning Service) — прецизионное определение местоположения.
NAVSTAR (NAVigation System with Time And Ranging) — навигационная система определения времени и дальности.
C/A (Coarse Acquisition) — грубый захват.
S/A (Selective Availability) — избирательный доступ.
СРНС – спутниковая радионавигационная система
ЕС КВО – Единая глобальная система координатно-временного обеспечения
КА – космический аппарат
НКА – навигационный КА
ЭО –эфемеридное обеспечение
UTC – координированное всемирное время
ЛИТЕРАТУРА
1. ГЛОНАСС, Интерфейсный контрольный документ. КНИЦ, 1995.
2. GPS Interface Control Document (ICD-GPS-200), 1991.
3. Rossbach U. et al. Transformation Parameters Beetween PZ-90 and WGS-84, 1996.
4. Misra P. et al. SGS85-WGS84 Transformation, Manuscripta Geodaetica, Vol.19, 1994.
5. Бутенко В.В., "Возможности использования ПКА “Эталон” для решения фундаментальных и прикладных задач геодезии, геофизики и геодинамики", Геодезия и картография, № 12, 1993.
6. Журнал «Новости навигации» , номер 2(4) 1999.
7. Богданов В.А., Сорочинский В.А., Якшевич Е.В. "Спутниковые системы морской навигации." – М.: Транспорт, 1987.
8. Баранов Ю.К. "Определение места судна с помощью навигационных спутников." - М.: Транспорт, 1984.
9. Оружие России. Том VI: Ракетно-космическая техника. - М.:Военный Парад, 1997.-589 стр. с илл.
10. Н.М. Волков, Н.Е. Иванов, В.А. Салищев, В.В. Тюбалин. Глобальная навигационная спутниковая система "ГЛОНАСС"//Успехи современной радиоэлектроники. 1997. №1.
11. А. Владимиров. В полете - тройка "Ураганов"//Новости космонавтики. 1999. №2,3.
12. http://www.geokosmos.ru
13. http://www.satellite.srd.mtuci.ru
14. http://www.mcc.rsa.ru
15. http://www.terraspace.ru/activity/geodez/library
16. http://www.rssi.ru/SFCSIC/SFCSIC_main.html
17. http://www.online.ru/news
18. http://www.ustu.ru/cnit/rcnit/inf_techn/slovar/item0145.htm
19. http://www.comizdat.com.ua/nets/y1999/no2/a51.htm
20. http://kunegin.narod.ru/ref1/glonass/6.htm
Похожие работы
... КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее. Алгоритмы приема и измерения параметров спутниковых радионавигационных сигналов К сегменту потребителей систем GPS и ГЛОНАСС относятся приёмники сигналов спутников. По измерениям параметров этих сигналов решается навигационная задача. Приёмник можно разделить на три функциональные части ...

... изложенным в таблице №8. Установка программного обеспечения так же входит в стоимость поставки комплекта. Таким образом, внедрение системы мониторинга автотранспорта на предприятии ГУП РМЭ "Пассажирские Перевозки" не требует снятия транспорта с линии и появления в структуре организации нового отдела. 5. Безопасность жизнедеятельности при внедрении и использовании системы мониторинга "WEB-GPS ...

... информации. Набираемая информация отображается на дисплее, что позволяет контролировать ее правильность. Клавиатура и дисплей АИС должны быть независимыми от других навигационных устройств. Судовыми системами отображения АИС могут быть система отображения электронных карт (ECDIS, ECS, RCDS), РЛС, САРП или дисплей персонального компьютера. АИС и связанные с ней датчики информации питаются от ...
... из бака с целью последующей его продажи: спутниковая система мониторинга записывает все сливы топлива с указанием их времени, даты, продолжительности и объёма. Для оперативных служб система GPS мониторинга транспорта является незаменимым источником информации в режиме реального времени, помогая в принятии ответственных решений. Система мониторинга автотранспорта используется для Скорой помощи, ...
0 комментариев