Навигация
Спутниковые системы навигации GPS и ГЛОНАСС
73619
знаков
8
таблиц
8
изображений
Ростовский Государственный Строительный Университет
Кафедра Прикладной Геодезии
Спутниковые системы навигации GPS и Глонасс
Выполнил: студ гр. ПГ-579 Веремчук Р. В
Проверил: Яковлев В. А
Ростов-на-Дону
2004
Введение
В декабре 1976 г. было принято Постановление ЦК КПСС и Совета Министров СССР "О развертывании Единой космической навигационной системы ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система)". Это постановление по сути лишь узаконило уже начавшиеся работы по созданию новой системы и определило порядок ее разработки и испытаний. Технические предложения по системе ГЛОНАСС в составе КА 11Ф654 "Ураган" были разработаны в красноярском НПО прикладной механики (НПО ПМ) в начале 1976 г. и рассмотрены межведомственной комиссией в августе того же года. Система ГЛОНАСС представляет второе поколение отечественных спутниковых навигационных систем. Создание этой навигационной системы было предопределено потребностями новых потенциальных потребителей, нуждавшихся в высокоточной привязке своего положения во времени и пространстве. В качестве таких потребителей выступали авиация, морской флот, наземные транспортные средства, космические аппараты, а также специальные боевые комплексы (в частности, мобильные МБР средней и большой дальности). Широкое внимание к спутниковой навигации привлекла успешная эксплуатация низкоорбитальных навигационных спутниковых систем морскими потребителями. В 1976 г. на вооружение Советской Армии была принята навигационно-связная система "Циклон-Б" в составе шести космических аппаратов "Парус", обращающихся на околополярных орбитах высотой 1000 км. Через три года была сдана в эксплуатацию спутниковая радионавигационная система (СРНС) "Цикада" в составе четырех КА на орбитах того же класса, что и у КА "Парус". И если первая система использовалась исключительно в интересах МО СССР, то вторая предназначалась, главным образом, для навигации гражданских морских судов. Оснащение спутниковой навигационной аппаратурой судов торгового флота оказалось очень выгодным, поскольку благодаря повышению точности судовождения удавалось настолько сэкономить время плавания и топливо, что бортовая аппаратура потребителя окупала себя после первого же года эксплуатации. В ходе испытаний этих и предшествовавшей им системы "Циклон" было установлено, что погрешность местоопределения движущегося судна по навигационным сигналам этих спутников составляет 250... 300 м. Выяснилось также, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутникам собственных эфемерид, которые рассчитываются и закладываются на борт КА средствами наземного комплекса управления (НКУ). С целью повышения точности определения и прогнозирования параметров орбит навигационных спутников была отработана специальная схема проведения измерений параметров орбит средствами НКУ, разработаны более точные методики прогнозирования. Для выявления локальных особенностей гравитационного поля Земли, оказывающих воздействие на выбранные орбиты навигационных КА (НКА), на такие же орбиты были запущены специальные геодезические спутники "Космос-842" и "Космос-911". Комплекс принятых мер позволил уточнить координаты измерительных средств и вычислить параметры согласующей модели гравитационного поля, предназначенной специально для определения и прогнозирования параметров движения НКА. В результате точность передаваемых в составе навигационного сигнала собственных эфемерид была повышена практически на порядок, так что их погрешность на интервале суточного прогноза не превышала 70...80 м. Как следствие, погрешность определения морскими судами своего местоположения уменьшилась до 80...100 м.
Однако выполнить требования всех потенциальных классов новых потребителей низкоорбитальные системы не могли в силу принципов, заложенных в основу их построения. Так, если для неподвижных потребителей, имеющих двухканальную приемную аппаратуру, погрешность определения местоположения удалось снизить до 32 м (данные для американской СРНС "Транзит"), то при движении погрешности сразу же начинают возрастать из-за неточности счисления пути - низкоорбитальные СРНС не позволяли определять скорость движения. Более того, по получаемым измерениям можно определить только две пространственные координаты. Вторым недостатком низкоорбитальных систем было отсутствие глобальности покрытия, поскольку, например, на экваторе спутники проходили через зону видимости потребителя в среднем через 1.5 часа, что допускает проведение только дискретных навигационных сеансов. Наконец, ввиду использования в сеансе лишь одного НКА продолжительность измерений может доходить до 10...16 мин. Большая длительность сеансов и значительные интервалы между ними делают неизбежным применение специальных мероприятий для счисления пути. При этом ошибки счисления и ограничивают точность местоопределения. Тем не менее была испытана самолетная аппаратура применительно к сигналам как системы "Транзит", так и "Цикада". При этом подтвердилось, что погрешность определения местоположения слабо зависит от маневров самолета и действительно определяется преимущественно погрешностями знания путевой скорости, не выходя за пределы 1.8 км.
СРНС второго поколения изначально проектировались как системы, которым все перечисленные недостатки не свойственны. Главным требованием при проектировании было обеспечение потребителю в любой момент времени возможности определения трех пространственных координат, вектора скорости и точного времени, что достигается путем одновременного приема сигналов от как минимум четырех НКА. В конечном итоге, это привело к реализации важной технической идеи - координации пространственного положения НКА на орбитах и координации по времени излучаемых спутниками сигналов. Координация движения всех НКА придает системе сетевые свойства, которых она лишается при отсутствии коррекции положения НКА.
В качестве орбит для новой системы первоначально были выбраны средневысокие (20000 км) полусуточные орбиты, которые обеспечивали оптимальное соотношение между количеством КА в системе и величиной зоны радиообзора. Однако впоследствии высота рабочей орбиты была уменьшена до 19100 км. Это было сделано исходя из того, что для КА, имеющих период обращения, равный половине суток, проявляется резонансный эффект влияния определенных гармоник геопотенциала, приводящий к достаточно быстрому "разрушению" заданного относительного положения НКА и конфигурации системы в целом. Очевидно, что в этом случае для поддержания системы пришлось бы чаще проводить коррекции орбиты каждого КА. При выбранной высоте орбиты для гарантированной видимости потребителем не менее четырех спутников их количество в системе должно составлять 18, однако оно было увеличено до 24-х с целью повышения точности определения собственных координат и скорости потребителя путем предоставления ему возможности выбора из числа видимых спутников четверки, обеспечивающей наивысшую точность. Следует отметить, что в настоящее время это требование потеряло актуальность, поскольку современная стандартная навигационная аппаратура потребителя (НАП) имеет возможность принимать сигналы от 8 до 12 НКА в зоне радиовидимости одновременно, что позволяет не заботиться о выборе оптимальной четверки, а просто обрабатывать все принимаемые измерения.
Одной из главных проблем создания СРНС, обеспечивающей беззапросные навигационные определения одновременно по нескольким спутникам, является проблема взаимной синхронизации спутниковых шкал времени с точностью до миллиардных долей секунды (наносекунд, нс), поскольку рассинхронизация излучаемых спутниками навигационных сигналов всего в 10 нс вызывает дополнительную погрешность в определении местоположения потребителя до 10...15 м. Для решения задачи высокоточной синхронизации бортовых шкал времени потребовалась установка на спутниках высокостабильных цезиевых стандартов частоты и наземного водородного стандарта (на порядок более стабильного), а также создания наземных средств сличения шкал с погрешностью 3...5 нс.
В 1977-78 гг. в НПО ПМ проводилось эскизное проектирование системы, материалы которого были одобрены в сентябре 1978 г. межведомственной комиссией под председательством генерал-майора И. В. Мещерякова. Тактико-техническое задание (ТТЗ) на систему ГЛОНАСС было согласовано с главнокомандующими всех видов Вооруженых Сил и министерствами: Минобщемашем, Минрадиопромом, Минавиапромом, Миноборонпромом, Минморфлотом, Минрыбхозом, Минсудпромом и Министерством гражданской авиации. В ноябре 1978 г. ТТЗ было утверждено Министром обороны СССР.
Однако к тому времени из-за слишком долгого периода согласования задания были сорваны первоначальные сроки по развертыванию системы. Поэтому 29 августа 1979 г. по ГЛОНАСС вышло новое Постановление ЦК и СМ. В нем были установлены следующие сроки выполнения работ по системе:
- начало летных испытаний и создание системы из 4-6 КА "Ураган" для проверки основных принципов и технических характеристик -1981 год;
- создание системы из 10-12 КА "Ураган" (в двух орбитальных рабочих плоскостях) и сдача ее на вооружение в составе и с тактико-техническими характеристиками по согласованию между Минобороны, Минобщемашем и Минрадиопромом - 1984 год;
- дооснащение системы до 24 КА - 1987 год.
Основными разработчиками системы в Постановлении были определены:
- НПО ПМ Минобщемаша - по системе в целом;
- ПО "Радиоприбор" (ныне РНИИ КП) Минобщемаша - по наземному комплексу управления, бортовому радиотехническому комплексу, аппаратуре потребителей;
- ЛНРТИ (ныне РИРВ) Минрадиопрома - по навигационно-временному комплексу.
Однако и эти порядок и сроки пришлось еще раз уточнить в июле 1981 г. В новом Постановлении ЦК и СМ сроком начала развертывания системы был назван 1982 г.
Летные испытания системы ГЛОНАСС были начаты 12 октября 1982 г. запуском первого КА 11Ф654 "Ураган" N11л и двух габаритно-весовых макетов 11Ф654ГВМ. Затем в последующих шести запусках на орбиту выводились по два штатных КА и одному ГВМ. Это было связано с неготовностью электронной аппаратуры спутников. Лишь с восьмого запуска в рамках развертывания системы ГЛОНАСС (16 сентября 1986 г.) на орбиту были выведены сразу три штатных КА. Дважды (10 января и 31 мая 1989 г.) вместе с двумя КА "Ураган" на орбиту выводились пассивные геодезические КА ПКА "Эталон", используемые для уточнения параметров гравитационного поля и его влияния на орбиты КА "Ураган".
Для отработки навигационной аппаратуры были изготовлены базовые комплекты по шесть штук каждого наименования для ВВС, ВМФ, СВ, МГА, ММФ и РВСН. Всего для летных испытаний было выделено 22 космических аппарата (9-10 запусков). Это число КА было израсходовано к 16 сентября 1987 г. Однако к этому моменту система не была развернута даже для ограниченного использования (12 КА в двух плоскостях). Лишь после запуска 4 апреля 1991 г. в составе ГЛОНАСС оказалось одновременно 12 работоспособных КА.
24 сентября 1993 г. первая очередь системы ГЛОНАСС была принята на вооружение. С этого момента стали проводиться запуски КА в третью орбитальную плоскость. 14 декабря 1995 г. после 27-го запуска "Протона-К" с "Ураганами" развертывание штатной конфигурации системы ГЛОНАСС было завершено. Всего с октября 1982 г. по декабрь 1998 г. на орбиту были выведены 74 КА "Ураган" и восемь его габаритно-весовых макетов (ГВМ). За время развертывания системы шесть "Ураганов" оказались на нерасчетных орбитах из-за отказов разгонного блока 11С861. По оценкам, проведенным в 1997 г., на развертывание системы было потрачено почти 2.5 млрд $.
Основные принципы работы системы ГЛОНАСС
Спутники системы ГЛОНАСС непрерывно излучают навигационные сигналы двух типов: навигационный сигнал стандартной точности (СТ) в диапазоне L1 (1,6 ГГц) и навигационный сигнал высокой точности (ВТ) в диапазонах L1 и L2 (1,2 ГГц). Информация, предоставляемая навигационным сигналом СТ, доступна всем потребителям на постоянной и глобальной основе и обеспечивает, при использовании приемников ГЛОНАСС возможность определения:
· горизонтальных координат с точностью 50-70 м (вероятность 99,7%);
· вертикальных координат с точностью 70 м (вероятность 99,7%);
· составляющих вектора скорости с точностью 15 см/с (вероятность 99,7%)
· точного времени с точностью 0,7 мкс (вероятность 99,7 %).
Эти точности можно значительно улучшить, если использовать дифференциальный метод навигации и/или дополнительные специальные методы измерений.
Сигнал ВТ предназначен, в основном, для потребителей МО РФ, и его несанкционированное использование не рекомендуется. Вопрос о предоставлении сигнала ВТ гражданским потребителям находится в стадии рассмотрения.
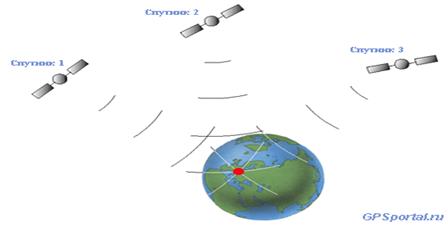
Для определения пространственных координат и точного времени требуется принять и обработать навигационные сигналы не менее чем от 4-х спутников ГЛОНАСС. При приеме навигационных радиосигналов ГЛОНАСС приемник, используя известные радиотехнические методы, измеряет дальности до видимых спутников и измеряет скорости их движения.
Одновременно с проведением измерений в приемнике выполняется автоматическая обработка содержащихся в каждом навигационном радиосигнале меток времени и цифровой информации. Цифровая информация описывает положение данного спутника в пространстве и времени (эфемериды) относительно единой для системы шкалы времени и в геоцентрической связанной декартовой системе координат. Кроме того, цифровая информация описывает положение других спутников системы (альманах) в виде кеплеровских элементов их орбит и содержит некоторые другие параметры. Результаты измерений и принятая цифровая информация являются исходными данными для решения навигационной задачи по определению координат и параметров движения. Навигационная задача решается автоматически в вычислительном устройстве приемника, при этом используется известный метод наименьших квадратов. В результате решения определяются три координаты местоположения потребителя, скорость его движения и осуществляется привязка шкалы времени потребителя к высокоточной шкале Координированного всемирного времени (UTC).
Радионавигационное поле
Навигационные радиосигналы, излучаемые штатными НКА, образуют радионавигационное поле в околоземном пространстве.
В СРНС ГЛОНАСС каждый штатный НКА излучает навигационные радиосигналы 1600 МГц и 1250 МГц в сторону Земли с помощью передающих антенн, рабочая часть диаграммы направленности (ДН) которых имеет ширину 2 =38 и “освещает” диск Земли с избытком до высоты h0 над поверхностью.
Рабочую часть ДН можно представить в виде конусного радиолуча с углом 2 0 при вершине. Очевидно, что
sin 0=(h0+r)/(H+r),
где r = 6400 км радиус Земли; H = 19100 км высота орбиты НКА.
Подставив 0=19 , получим h0 = 2000 км.
При полной ОГ (24 штатных НКА) радионавигационное поле на высотах h h0 = 2000 км непрерывно в пространстве, т.е. потребитель в любой точке этого пространства “освещается” радиолучами не менее чем от четырех НКА, образующих по отношению к нему удовлетворительное по геометрическому фактору созвездие для оперативного автономного определения координат и вектора скорости.
На высотах h h0 радионавигационное поле становится дискретным в пространстве. Космические объекты на высотах h
Похожие работы



... , что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система. · ГЛОНАСС Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР. Принадлежит министерству обороны России. Является попыткой ...
... этому адресу. Вызываемое устройство, организовав GPRS-сеанс и получив динамический IP-адрес, устанавливает TCP/IP-соединение с вызывающим устройством. 3. Анализ функционирования систем безопасности, использующих gsm каналы 3.1 Анализ помехоустойчивости и помехозащищённости gsm канала Помехи в радиоканале создаются как за счет искажений сигнала при его распространении, так и в результате ...
... , таких как: телекоммуникация, радиоместоопределение(системы навигации gps, глонасс и др.), главной задачей большинства геостационарных спутников является формирование изображений видимой земной поверхности. Спутниковые системы связи с геостационарными спутниками-ретрансляторами идеально подходят для решения таких задач, как организация телевизионного и звукового вещания на обширных территориях и ...
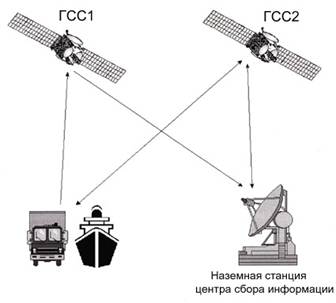



... контроль за перемещением подвижных объектов в центре сбора информации о местоположении и движении объектов или, как иногда это называют, сопровождение подвижных объектов. Спутниковые системы местоопределения подвижных объектов базируются на использовании радиолиний, обеспечивающих передачу сигналов между подвижным объектом, искусственным спутником Земли (ИСЗ) и наземной станцией, При этом ...
0 комментариев