Навигация
Применение лазеров в военной технике (лазерная локация)
39497
знаков
0
таблиц
0
изображений
6. Применение лазеров в военной технике (лазерная локация)
а) наземная локация
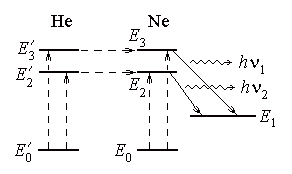
Как сообщает печать, за рубежом разрабатывается ряд стационарных лазерных локаторов. Эти локаторы предназначены для слежения за ракетами на начальном этапе полета, а также для слежения за самолетами и спутниками. Большое значение придается лазерному локатору, включенному в систему ПРО и ПКО. По проекту американской системы именно оптический локатор обеспечивает выдачу точных координат головной части или спутника в систему лазерного поражения цели. Локатор типа "ОПДАР" предназначен для слежения за ракетами на активном участке их полета. Тактические требования определяют незначительную дальность действия локатора, поэтому на нем установлен газовый лазер, работающий на гелий-неоновой смеси, излучающий электромагнитную энергию на волне 0.6328мкм при входной мощности всего 0.01Вт. Лазер работает в непрерывном режиме, но его излучение модулируется с частотой 100МГц. Передающая оптическая система собрана из оптических элементов по схеме Кассагрена, что обеспечивает очень незначительную ширину расходимости луча. Локатор монтируется на основании, относительно которого он может с помощью следящей системы устанавливаться в нужном направлении с высокой точностью. Эта следящая система управляется сигналами, которые поступают через кодирующее устройство. Разрядность кода составляет 21 единицу двоичной информации, что позволяет устанавливать локатор в нужном направлении с точностью около одной угловой секунды. Приемная оптическая система имеет диаметр входной линзы 300мм. В ней установлен интерференционный фильтр, предназначенный для подавления фоновых помех, а также устройство, обеспечивающее фазовое детектирование отраженной ракетой сигналов. В связи с тем, что локатор работает по своим объектам, то с целью увеличения отражательной способности ракеты на нее устанавливается зеркальный уголковый отражатель, который представляет собой систему из пяти рефлекторов, обеспечивающих распределение упавшей на них световой энергии таким образом, что основная ее часть идет в сторону лазерного локатора. Это повышает эффективность отражающей способности ракеты в тысячи раз. Локатор имеет три устройства слежения по углам: точный и грубый датчики по углам и еще инфракрасную следящую систему. Технические данные первого датчика определяются в основном оптическими характеристиками приемо-передающей системы. А так как диаметр входной оптической системы равен 300мм и фокусное расстояние равно 2000м, то это обеспечивает угловую разрешающую способность 80 угловых секунд. Сканирующее устройство имеет полосу пропускания 100Гц. Второй датчик имеет оптическую систему с диаметром 150мм и меньшее фокусное расстояние. Это дает разрешающую способность по углу всего 200 угловых секунд, т.е. обеспечивает меньшую точность, чем первый. В качестве приемников излучения оба канала оснащены фотоумножителями, т.е. наиболее чувствительными элементами из имеющихся. Перед приемником излучения располагается интерференционный фильтр с полосой пропускания всего в 1.5 ангстрема. Это резко снижает долю приходящего излучения от фона. Полоса пропускания согласована с длиной волны излучения лазера, чем обеспечивается прохождение на приемник только своего лазерного излучения. Локатор позволяет работать в пределах от 30 до 30000м. Предельная высота полета ракеты 18000м. Сообщается, что этот локатор обычно располагается от ракеты на расстоянии около 1000м и на линии,
составляющей с плоскостью полета ракеты 45 градусов. Измерение параметров движения ракеты с такой высокой точностью на активном участке полета дает возможность точно рассчитать точку ее падения. Локатор для слежения. Рассмотрим локатор созданный по заказу НАСА и предназначенный для слежения за спутниками. Он предназначался для слежения за собственными спутниками и работал совместно с радиолокатором, который выдавал координаты спутника с низкой точностью. Эти координаты использовались для предварительного наведения лазерного локатора, который выдавал координаты с высокой точностью. Целью эксперимента было определение того, насколько отклоняется истинная траектория спутника от расчетной, - чтобы узнать распределение поля тяготения Земли по всей ее сфере. Для этого на полярную орбиту был запущен спутник "Эксплорер-22". Его орбита была рассчитана с высокой точностью, но в качестве исходных данных вложили информацию, что поле тяготения определяется формой Земли, т.е. использовали упрощенную модель. Если же теперь в процессе полета спутника наблюдалось уменьшение высоты его относительно расчетной траектории, то очевидно, что на этом участке имеются аномалии в поле тяготения. По спутнику "Эксплорер-22" была, по сообщению НАСА, проведена серия экспериментов и часть этих данных была опубликована. В одном из сообщений говорится, что на расстоянии 960 км. ошибка в дальности составляла 3м. Минимальный угол, считываемый с кодируемого устройства, был равен всего пяти угловым секундам. Интересно, что в это время появилось сообщение, что американцев опередили в их работе французские инженеры и ученые. Сотрудники лаборатории Сан-Мишель де Прованс провели серию экспериментов по наблюдению за тем же спутником, используя лазерный локатор своего производства.
б) голографические индикаторы на лобовом стеклеДля использования в прицельно-навигационной системе ночного видения, предназначенной для истребителя F-16 и штурмовика A-10 был разработан голографический индикатор на лобовом стекле. В связи с тем, что габариты кабины самолетов невелики, то с тем, что-бы получить большое мгновенное поле зрения индикатора разработчиками было решено разместить коллимирующий элемент под приборной доской. Оптическая система включает
три раздельных элемента, каждый из которых обладает свойствами дифракционных оптических систем: центральный изогнутый элемент выполняет
функции коллиматора, два других элемента служат для изменения положения лучей. Разработан метод отображения на одном экране объединенной информации: в форме растра и в штриховой форме, что достигается благодаря использованию обратного хода луча при формировании растра с интервалом времени 1.3мс, в течении которого на ТВ-экране воспроизводится информация в буквенно-цифровой форме и в виде графических данных, формируемых штриховым способом. Для экрана ТВ-трубки индикатора используется узкополосный люминофор, благодаря чему обеспечивается хорошая селективность голографической системы при воспроизведении изображений и пропускание света без розового оттенка от внешней обстановки. В процессе этой работы решалась проблема приведения наблюдаемого изображения в соответствие с изображением на индикаторе при полетах на малых высотах в ночное время (система ночного видения давала несколько увеличенное изображение), которым летчик не мог пользоваться, поскольку при этом несколько искажалась картина, которую можно бы было получить при визуальном обзоре. Исследования показали, что в этих случаях летчик теряет уверенность, стремится лететь с меньшей скоростью и на большой высоте. Необходимо было создать систему, обеспечивающую получение действительного изображения достаточно большого размера, чтобы летчик мог пилотировать самолет визуально ночью и в сложных метеоусловиях, лишь изредка сверяясь с приборами. Для этого потребовалось широкое поле индикатора, при котором расширяются возможности летчика по пилотированию самолета, обнаружению целей в стороне от маршрута и производству противозенитного маршрута и маневра атаки целей. Для обеспечения этих маневров необходимо большое поле зрения по углу места и азимуту. С увеличением угла крена самолета летчик должен иметь широкое поле зрения во вертикали. Установка коллимирующего элемента как можно выше и ближе к глазам летчика была достигнута за счет применения голографических элементов в качестве зеркал для изменения направления пучка лучей. Это хотя и усложнило конструкцию, однако дало возможность использовать простые и дешевые голографические элементы с высокой отдачей.
В США разрабатывается голографический координатор для распознавания и сопровождения целей. Основным назначением такого коррелятора является выработка и контроль сигналов управления наведения ракеты на среднем и заключительном участках траектории полета. Это достигается путем мгновенного сравнения изображений земной поверхности, находящейся в поле зрения системы в нижней и передней полусфере, с изображением различных участков земной поверхности по заданной траектории, хранимым в запоминающем устройстве системы.. Таким образом обеспечивается возможность непрерывного определения местонахождения ракеты на траектории с использованием близко лежащих участков поверхности, что позволяет проводить коррекцию курса в условиях частичного затемнения местности облаками. Высокая точность на заключительном этапе полета достигается с помощью сигналов коррекции с частотой меньше 1 Гц. Для системы управления ракетой не требуется инерциальная система координат и координаты точного положения цели. Как сообщается, исходные данные для данной системы должны обеспечиваться преварительной аэро- или космической разведкой и состоять из серии последовательных кадров, представляющих собой Фурье-спектр изображения или панорамные фотографии местности, как это делается при использовании существующего площадного коррелятора местности. Применение этой схемы, как утверждают специалисты, позволит производить пуски ракет с носителя, находящегося вне зоны ПВО противника, с любой высоты и точки траектории, при любом ракурсе, обеспечит высокую помехоустойчивость, наведения управляемого оружия после пуска по заранее выбранным и хорошо замаскированным стационарным целям. Образец аппаратуры включает в себя входной объектив, устройство преобразования текущего изображения, работающего в реальном масштабе времени, голографической линзовой матрицы, согласованной с голографическим запоминающим устройством, лазера, входного фотодетектора и электронных блоков. Особенностью данной схемы является использование линзовой матрицы из 100 элементов, имеющих формат 10x10. Каждая элементарная линза обеспечивает обзор всей входной аппаратуры и, следовательно, всего сигнала от поступающего на вход изображения местности или цели. На заданной фокальной плоскости образуется соответственно 100 Фурье спектров этого входного сигнала. Таким образом мгновенный входной сигнал адресуется одновременно к 100 позициям памяти. В соответствии в линзовой матрице изготавливается голографическая память большой емкости с использованием согласованных фильтров и учетом необходимых условий применения. Сообщается, что на этапе испытания системы был выявлен ряд ее важных характеристик.
1. Высокая обнаружительная способность как при низкой, так и при высокой контрастности изображения, способность правильно опознать входную информацию, если даже имеется только часть ее.
2. Возможность плавного автоматического перехода сигналов сопровождения при смене одного изображения местности другим, содержащимся в запоминающем устройстве.
3. Возможность расширения зоны пуска ракеты путем запоминания несколько близко расположенных участков местности, из которых каждая имеет соответствующую ориентацию на цель. В процессе полета ракета может быстро переведена на заданную траекторию, зависящую от динамики ракеты.
Список использованной литературы:
1.Энциклопедический словарь юного физика (гл.редактор Мигдал А.Б.) Москва “Педагогика” 1991г.
2.О.Ф.Кабардин “Физика” Москва “Просвещение” 1988г.
3.”Газовые лазеры” (под. ред. Н.Н.Соболева) Москва “Мир” 1968г.
4. Л. В. Тарасов «Лазеры: Действительность и надежды» Москва «Наука», 1985
Похожие работы
... лазеры непрерывного действия на сотни киловатт. В этих лазерах «перенаселенность» верхних энергетических уровней создается ! при расширении и адиабатном охлаждении сверхзвуковых газовых потоков, нагретых до нескольких тысяч кельвин. 5)Применение лазеров. Лазеры используют во многих сферах деятельности. Ведь лазер это удивительный источник света. Лазеры, конечно, при желании могут применяться в ...
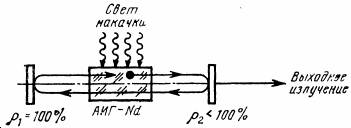
... синхронизации мод. Большое время жизни верхнего лазерного уровня (т = 0,23 мс) позволяет АИГ-Nd быть весьма хорошим для работы в режиме модулированной добротности. Конструкция АИГ-Nd ЛАЗЕРОВ Среди многообразия лазеров с непрерывной накачкой широкое применение нашли три вида: одномодовые лазеры с модуляцией добротности, лазеры с 'преобразованием частоты и мощные лазеры непрерывного режима. ...
... k соответствуют кольца меньшего диаметра. Число k неизвестно. Его можно исключить, вычитая соотношение (10) из (11). В результате, после алгебраических преобразований получается формула для расчёта длины волны l излучения лазера: . (12) 2. Порядок выполнения работы 1. Попросите лаборанта подключить блок питания лазера к сети. Под наблюдением лаборанта включите тумблер «Сеть» на ...
... , причём в условиях, когда давление поглощающего газа значительно меньше активного. С помощью поглощающей ячейки достигнута относительная стабильность частоты излучения ~ 10-13 — 10-14 Полупроводниковые лазеры. Среди Л. видимого и инфракрасного диапазонов полупроводниковые Л. занимают особое положение по ряду своих характеристик. В полупроводниках удаётся получить очень большие коэффициенты ...
0 комментариев