Навигация
Ликвидация вертикальных конфликтов межсоединений в канале перед трассировкой
16388
знаков
0
таблиц
2
изображения
А.В. Мухлаев, С.Н. Щеглов, М.Д. Сеченов
Введение
Низкая временная и пространственная сложность алгоритмов канальной трассировки делает их наиболее приемлемыми в САПР электронных систем, где решаются задачи огромной размерности (несколько миллионов транзисторов). Указанное обстоятельство обусловило повышенный интерес разработчиков САПР к группе канальных алгоритмов и, как следствие, большое число различных типов канальных трассировщиков.
Наибольшее внимание исследователей традиционно привлекала группа канальных алгоритмов, относящихся к безизломным канальным трассировщикам. Подробнее остановимся на указанной группе алгоритмов и введем некоторые основные понятия, так как безизломные канальные трассировщики наиболее приемлемы в последующим причинам:
– позволяют получать решения наиболее быстро ;
– хорошо апробированы и применяются на практике ;
– достаточно качественно и эффективно решают задачу трассировки в двустороннем канале.
1. Классификация, критерии и постановка задачи канальной трассировки
Ввиду того, что задача канальной трассировки в сводится к задаче трассировки горизонтального канала, сверху и снизу ограниченного подлежащими соединению контактами, запишем формальную постановку задачи и дадим традиционные определения плотности и графа вертикальных ограничений (ГВО) (рис. 1).
Пусть задана декартова система координат и на оси Х с ша-гом n отложены точки Pl1, Pl2, ...,Pln , образующие кортеж B и соответствующие нижнему ряду контактов горизонтального канала, а на некоторой линии mi (линии mj откладываются с шагом b ), параллельной оси Х отложены точки Pt1, Pt2, ...,Ptn образующие кортеж Т и соответствующие верхним контактам горизонтaльного канала.
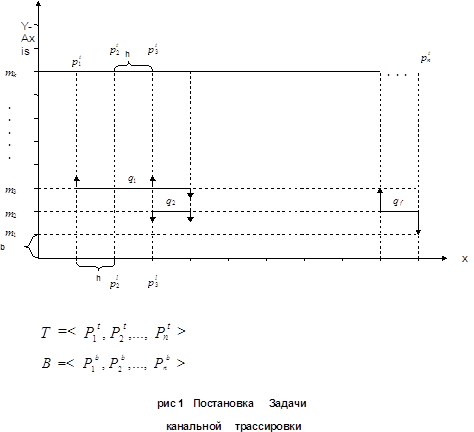
Выделим подмножества Plij,Ptij,j=1,f,i=1,f,Plj,Pti¹0}, каждое из которых составлено из Plj и Pti равных между собой, т.е. соответствующих одной цепи (f- число цепей). На их основе сформируем множество отрезков Q={q1,q2,...,qn}левые координаты которых равны минимальной координате PljÚPti из соответствующего подмножеcтва Pi-Xq1i=min Хрi, а правые координаты-максимальной координате P1jÚPtj-Xq2i=maxXpi
Необходимо распределить qf отрезков по магистралям таким образом, чтобы требуемое для трассировки число магистралей было минимально: mk®min и выполнялось ограничение (1)
"(i,j)=1,f:q1*nqj=Æ ( 1)
а также ограничения, задаваемые с помощью графа вертикальных ограничений (ГВО), множество вершин которого соответствует Pi,j=1,f ,т.е. соответствует множеству цепей, а две его вершины Pi и Pj соединяются ориентированным ребром, что означает принудительное расположение отрезка qiвыше, чем qj в том случае, если
"PtijÎTÞ Ptij¹ PlijÎB
Следует отметить, что условие (1) несомненно приоритетно по сравнению с другими критериями трассировки (см. рис. 1), однако, может носить и аддитивный и мультипликативный характер. Отметим, что плотность Ui колонки i канала будем называть число горизонтальных сегментов Sqi, пересекающих i ко-лонку. Максимальной плотностью Umax назовем Ui :
j=1,n
Широко известны и применяются на практике алгоритмы "Левого края" и раскраски графа ограничений комбинаторные, дающие решения очень быстро. К наиболее эффективным алгоритмам этой группы следует отнести алгоритм Йошимуры, где каждому горизонтальному сегменту цепи qi ставится в соответствие интегральная характеристика.
Наряду с указанными достоинствами беэизломные алгоритмы обладают и рядом недостатков, при этом один из основных- невозможность решения так называемых циклических конфликтов.
В связи с этим целесообразным представляется разработка подсистемы трассировки, базирующейся на методе систем продукций и содержащей интеллектуализированные процедуры решения циклических конфликтов. В качестве достоинств метода систем продукций отметим:
– модульность;
– понятность работы для операэвора;
– легкость ведения и дополнения БЗ;
– описание правил - продукции на профессиональном языке.
Отметим, что более 70% современных ЭС строятся на основеметода систем продукций /86,87/, и среди них такие известные как MYCIN,OPSS,VIREX,SMALL ТАLK и др.
0 комментариев