Усиление контрастности
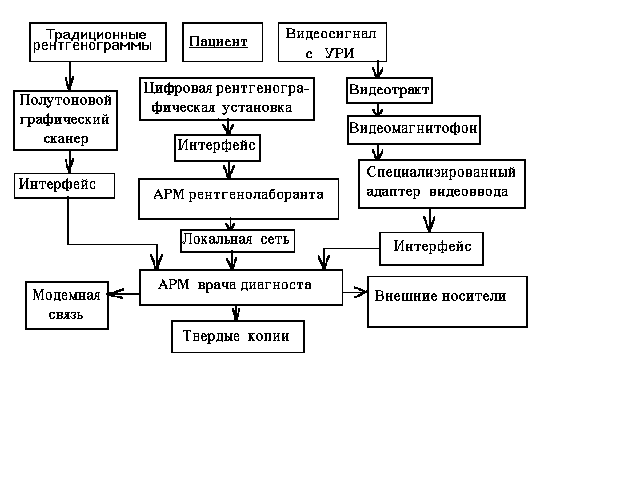
Состав технических средств АРМ ВР
Цифровая рентгенография с экрана электронно-оптического преобразователя (ЭОП)
Математическая постановка задачи рентгеновской компьютерной томографии, преобразование Радона и формулы обращения
Приведение формул обращения томографической реконструкции в конусе лучей к виду, позволяющему строить численные алгоритмы
Элементы теории обобщенных функций в применении к задачам обращения лучевого преобразования
Навигация
Элементы теории обобщенных функций в применении к задачам обращения лучевого преобразования
Средства визуализации изображений в компьютерной томографии и цифровых рентгенографических системах
83583
знака
1
таблица
0
изображений
4.3 Элементы теории обобщенных функций в применении к задачам обращения лучевого преобразования
Обобщенная функция это непрерывный линейный функционал на пространстве К всех функций a (x), имеющих производные всех порядков и финитный носитель (свой для каждой из функций α (x)). Любая регулярная интегрируемая функция f(x) задает линейный функционал (f, a ):
. (2.2.1)
Однако на пространстве функций K существуют непрерывные линейные функционалы, которые не могут быть заданы с помощью регулярных интегрируемых функций, наиболее известными примерами таких функционалов являются δ-функция и ее производные. Другим широко известным примером является функционал, основанный на функции (1/x)dx. Функция 1/x x является регулярной, однако она не является интегрируемой. При задании соответствующего функционала интеграл
(2.2.2)
понимается в смысле главного значения:
.
Такое понимание интеграла используется при определении преобразования Гильберта от функции α (x) как свертки с функцией 1/xx.
.
Преобразование Гильберта используется, в частности, в одной из формул обращения преобразования Радона в двумерном пространстве. Эта формула обычно приводится в руководствах по компьютерной рентгеновской томографии. Однако метод свертки и обратного проецирования, часто используемый при построении численных алгоритмов томографической реконструкции, основан на несколько другом виде формулы обращения преобразования Радона. В этом методе по существу используется свертка проекционных данных последовательностью функций сходящихся к 1/xx2 в смысле обобщенных функций.
Линейный функционал, соответствующий функции 1/xx2, или, что то же самое, обобщенная функция 1/xx2 определяется формулой [19]
(2.2.3)
Интеграл в (2.2.3) сходится в обычном смысле для любой функции a (x) из пространства основных, и даже из более широкого класса, функций.
В формулах обращения преобразования Радона используется свертка данных с функцией 1/xx2. Свертка обобщенных функций определяется следующим образом.
Пусть заданы два функционала f и g . Действие функционала f *g являющегося их сверткой, на функцию a из пространства основных задается формулой
(f *g, a )= (fx, gy, a (x + y))). (2.2.4)
Здесь gy означает, что функционал действует на функцию a , как функцию переменной y, а функционал f действует на полученную функцию переменной x. Если функционалы f и g можно задать регулярными функциям, то функционал свертки определенный формулой (2.2.4) можно задать функцией, являющейся сверткой соответствующих функций в обычном смысле.
Здесь следует сделать одно замечание. Даже если функция одной переменной a (t ) имеет финитный носитель, функция двух переменных a (x + y) не является функцией с финитным носителем. Это означает, что существование функционала f *g для конкретных функционалов f и g или необходимо доказывать. Известно, что для существования функционала свертки, достаточно, чтобы один из функционалов имел финитный носитель.
Если рассматривать задачи томографии, то там с функцией 1/xx2 сворачиваются исходные данные, которые регулярны и имеют финитный носитель. Можно показать также, что необходимая свертка выражается формулой:
S(r, j ) = I(r, j ) * (-1/p r2 ) =
(2.2.5)
В реальных ситуациях функция I(r, j ) известна в некотором дискретном множестве точек. Для того, чтобы использовать формулу (2.2.4) нужно построить аппроксимацию функции I(r, j ), такую что интеграл в правой части имеет смысл. Интеграл (2.2.4) заведомо сходится, если функция I(r, j ) принадлежит множеству K, то есть имеет финитный носитель и является бесконечно дифференцируемой.
Однако аппроксимация данных бесконечно дифференцируемой функцией может оказаться громоздкой при построении численных алгоритмов. Кроме того, использование бесконечно дифференцируемых функций может приводить к заглаживанию границ областей с резко отличающимися плотностями. Для сходимости интеграла в (2.2.5) достаточно, чтобы функция I(r, j ) имела в каждой точке конечные односторонние производные первого порядка по переменной r. Это позволяет, в частности, использовать кубические сплайны для построения аппроксимации функции I(r, j ).
Основными операциями с обобщенными функциями, используемыми в задачах томографии, являются свертка, дифференцирование и преобразование Фурье. Основная идея определения операций заключается в том, что некоторые свойства функционалов, задаваемых регулярными функциями, берутся за основу при определении соответствующих операций над обобщенными функциями, являющимися линейными функционалами.
На этой основе построено приведенное выше определение свертки. Особенно просто и наглядно этот прием можно продемонстрировать при определении операции дифференцирования обобщенных функций.
Пусть линейный функционал f задается регулярной функцией f(x) имеющей интегрируемую производную. Для действия производной на функцию a (x) из пространства основных можно записать равенство
, (2.2.6)
здесь использовано интегрирование по частям и то, что a (x) равна нулю вне некоторого конечного интервала.
Приведенное выше свойство берется за основу при определении производной обобщенной функции. Пусть задан функционал f, его производной называется функционал f/, определяемый равенством . Так как функции из пространства основных бесконечно дифференцируемы, то определение является корректным и обобщенные функции имеют производные любого порядка.
Перейдем к определению преобразования Фурье в смысле обобщенных функций. В приводившихся выше определениях функции, входящие в пространство основных, были действительными. При определении преобразования Фурье целесообразно в качестве основных рассмотреть комплекснозначные функции.
Пусть K пространство комплексных основных функций (бесконечно дифференцируемых с финитным носителем).
Каждой комплекснозначной локально интегрируемой функции f(x) ставится в соответствие функционал
,
комплексно сопряжена с f(x), a (x) Î K.
Множество всех линейных непрерывных функционалов на K образует комплексное пространство обобщенных функций K/. Обозначим через Z - множество функций, являющихся преобразованиями Фурье функций из K.
Преобразованием Фурье элемента f из пространства K называется функционал g на пространстве Z, действующий по формуле
(g, y ) = 2 p (f, a ), (2.2.7)
здесь j такой элемент из K, для которого преобразование Фурье есть y . То есть для того чтобы вычислить действие функционала g на функцию y (l ) из пространства Z, нужно:
найти такую функцию a (x) из пространства K, преобразованием Фурье, которой является функция y (l );
найти действие функционала f на найденную функцию a (x).
Пространства основных функций и функционалов над ними выбраны нами так, что оба шага всегда выполнимы.
Здесь следует обратить внимание на то, что обобщенные функции и их преобразования Фурье определяются как линейные функционалы над разными основными пространствами. Причем функции из множества Z, на котором действуют преобразования Фурье, не являются функциями с финитными носителями, но продолжают оставаться бесконечно дифференцируемым. Что позволяет сохранить многие полезные свойства обобщенных функций.
В формулах обращения лучевого преобразования, на которых основаны алгоритмы решения задачах трехмерной компьютерной томографии, используется преобразование Фурье однородных функций. Классическое преобразование Фурье таких функций не существует, преобразование Фурье в формулах понимается в смысле обобщенных функций.
Рассмотрим несколько подробнее этот вопрос с точки зрения возможности построения соответствующих численных алгоритмов в трехмерном пространстве.
Напомним определение лучевого преобразования, которое было дано в предыдущих параграфах.
Лучевым преобразованием функции f(x) = f(x1, x2, x3) называется функция
, (2.2.8)
являющаяся интегралом от f(x) вдоль луча, исходящего из точки S = (s1, s2, s3) в направлении вектора a = (a 1, a 2, a 3).
Как уже отмечалось выше, в наряду с функцией рассматривается функция
,
являющаяся интегралом по всей прямой или, что тоже самое, суммой интегралов вдоль лучей из точки S в направлениях a и - a .
Обе функции являются однородными степени -1, то есть для них выполняются равенства
, .
Отметим также, что является четной, а функция таковой не является.
Понятие однородности степени l можно естественным образом расширить на обобщенные функции, если взять за основу равенство g(g x) = g l g(x). В терминах действия на основную функцию j равенство запишется в виде (g, j (x/g ) = g l +n (g, j (x)), здесь g v любое вещественное число большее нуля, n n - размерность пространства, в котором заданы основные функции. В интегральном представлении обобщенных функций показатель n возникает при соответствующей замене переменных в dx.
Известно, что преобразование Фурье однородной обобщенной функции, тоже является однородной обобщенной функцией.
Для интегрируемых, ограниченных и имеющих ограниченный носитель, функций f их лучевое преобразование является регулярной однородной функцией. Из результатов работ следует, что в трехмерном пространстве преобразование Фурье таких функций, понимаемое в обобщенном смысле, задается регулярной функцией. Регулярная однородная функция задается своими значениями на единичной сфере. Таким образом, в практических ситуациях при инвертировании лучевого преобразования нас интересует соотношение между двумя функциями. Одна из них является сужением на единичную сферу лучевого преобразования, а другая - сужением на единичную сферу преобразование Фурье лучевых данных, понимаемого в смысле обобщенных функций. Подобное преобразование между функциями, заданными на единичной сфере естественно назвать преобразованием Семянистого, поскольку в его работе впервые получены подобные соотношения для симметричных однородных функций в n-мерных пространствах. Как уже отмечалось выше, функция не является симметричной, для нее соответствующие соотношения для функций на единичных сферах в трехмерном пространстве были получены в предыдущих параграфах.
Ранее были рассмотрены формулы обращения лучевого преобразования, основанные на явном использовании обобщенных функций, и приемы, позволяющие приводить эти формулы к виду удобному для построения численных алгоритмов.
К выводу формул обращения лучевого преобразования есть другой подход, не использующий обобщенные функции в явном виде. Мы покажем здесь, что фактически этот метод тоже основан на использовании преобразования Фурье в смысле обобщенных функций.
Лучевыми данными называется функция
,
Ф = (Ф1, Ф2, Ф3) Î R3, b Î S2 (S2 v единичная сфера). (Не трудно видеть, что в наших обозначениях это функция ).
В формулах обращения используются следующие функции:
(2.2.9)
, (2.2.10)
(S2/2 - половина единичной сферы), - скалярное произведение векторов и .
Формулы обращения в имеет вид
, (2.2.11)
где , R v радиус шара, в котором содержится носитель функции f(х), -элемент поверхности на единичной сфере.
Если для любого l, такого, что ½ l½ < R и любого b Î S2/2 существует точка Ф на траектории источника такая, что Ф × b = l (выполняются условия Кириллова-Туя), то формула (2.2.11) может быть использована для определения функции f(х).
В отмечается, что функция F при трехмерной томографической реконструкции в конусе лучей в определенной степени аналогична роли преобразования Фурье в двумерной томографии. Этот факт не является случайным.
Действительно, в показано, преобразование Фурье по b в смысле обобщенных функций от функции g(b , Ф) имеет вид
. (2.2.12)
Знаменатель в (2.2.12) может быть равен нулю, и (2.2.12) следует понимать в смысле обобщенных функций. В доказано следующее утверждение.
Если f j Î C2, то
. (2.2.13)
Учитывая (2.2.13), (2.2.12) и (2.2.10) мы видим, что функция , является преобразованием Фурье в смысле обобщенных функций функции g(b , F ), а функция F в формуле обращения определяется функцией .
4.4. Соотношения между преобразованиями Радона, Фурье и лучевым преобразованием.
В предыдущих параграфах были рассмотрены формулы непосредственного обращения лучевого преобразования. Существуют также методы томографической реконструкции, основанные на предварительном вычислении преобразования Фурье искомой функции или ее преобразования Радона. Как уже отмечалось ранее, в случае двух переменных лучевое преобразование и преобразование Радона совпадают. В трехмерном пространстве v это разные преобразования.
Для понимания сути методов томографии весьма полезны соотношения между различными видами преобразований. Многие такие соотношения можно получить в пространствах любой размерности. Однако здесь мы будем, как правило, рассматривать практически важные случаи двух и трех переменных.
Соотношение между преобразованиями Радона и Фурье.
Пусть - преобразование Фурье функции f(x1, x2, x3):
.
Интегрируя сначала при фиксированном p по плоскости l 1x1 + l 2x2 + l 3x3 = p, а затем по p приходим к хорошо известному выражению, связывающему преобразования Фурье и Радона
. (2.3.1)
Соотношение между преобразованием Радона и преобразованием Фурье лучевых данных.
В [21] предложен способ инвертирования лучевого преобразования, основанный на том, что по исходным данным восстанавливается преобразование Радона функции f(x)
,
что позволяет по известным формулам восстановить f(x).
При выводе формул обращения в работе используется функция
. (2.3.2)
Можно показать что для функций и справедливо соотношение
, (2.3.3)
здесь С v некоторая константа. Равенства (2.3.2) и (2.3.3) дают связь между преобразованием Радона и лучевым преобразованием в трехмерном пространстве:
, (2.3.4)
Отметим также, что поскольку
, . Равенство (2.3.4) может быть записано в виде . Из последнего равенства и определения функции следует, что функция x постоянна на плоскостях, ортогональных вектору x , так как для всех x, принадлежащих такой плоскости, скалярное произведение (x, x ) равно константе. Этот факт лежит в основе многих методов обращения лучевого преобразования. Это утверждение получено в [40], для случая комплексных пространств. Для действительных пространств это утверждение содержится в работах. Оно и может быть использовано для восстановления функции в точках x, принадлежащих области D, по значениям на ее границах.
Соотношение между преобразованием Фурье лучевых данных и преобразованием Фурье искомой функции f(x).
В работе получено равенство:
, (2.3.5)
устанавливающее связь между преобразованием Фурье лучевых данных и преобразованием Фурье самой функции f, преобразование Фурье понимается в смысле обобщенных функций. Для того, чтобы использовать эту формулу для нахождения функции f нужно иметь формулы для вычисления обобщенного преобразования Фурье по лучевым данным. Такие формулы были приведены выше.
В заключение, хотелось бы сказать, что раскрытие того множества вопросов, затронутых в данной работе, можно бы было продолжать ещё очень долго, так что ряд тем представлены несколько ужато. Особый интерес представляло изучение именно технической (физической, если угодно) стороны компьютерной томографии, как метода диагностики. Замечаний к работе может, в принципе, возникнуть много, однако надеюсь на несколько снисходительное отношение – сроки были сжатые, вопрос – обширный (да и сам процесс написания прерывался - пошуровал в компьютере win95.cih).
5. ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА.
1. Розенштраух Л.С. Невидимое стало зримым (успехи и проблемы лучевой диагностики).- М.: Знание, 1987.- 64 с.
2. Томография грудной клетки / Помозгов А.И., Терновой С.К., Бабий Я.С., Лепихин Н.М. - К.:Здоровья,1992.- 288 с.
3. Компьютерная томография мозга. Верещагин Н.В., Брагина Л.К., Вавилов С.Б., Левина Г.Я.-М.:Медицина,1986.-256 с.
4. Коновалов А.Н., Корниенко В.Н. Компьютерная томография в нейрохирургической клинике.-
М.: Медицина,1988. - 346 с.
5. Физика визуализации изображений в медицине: В 2-х томах.
Т.1:Пер. с англ./Под ред. С.Уэбба.-М.:Мир,1991.- 408 с.
6. Антонов А.О., Антонов О.С.,Лыткин С.А.//Мед.техника.-1995.- № 3 - с.3-6
7. Беликова Т.П.,Лапшин В.В.,Яшунская Н.И.//Мед.техника.-1995.- № 1-с.7
Похожие работы
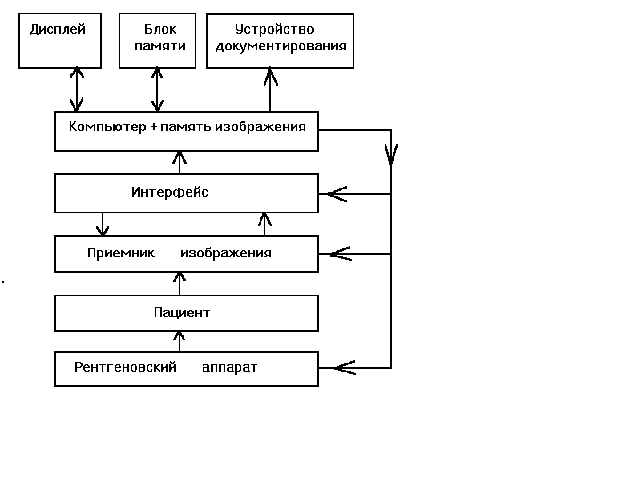
... более дорогостоящими, нежели обычные рентгеновские системы, однако по мере развития компьютерной техники и систем визуализации находят все более широкое применение. Цифровая рентгенодиагностика обеспечивается компьютерной технологией.Дисплей Блок долговременной памяти Устройство документирования Компьютер + память изображенияИнтерфейс данныхПриемник изображения Пациент Рентгеновский аппарат ...
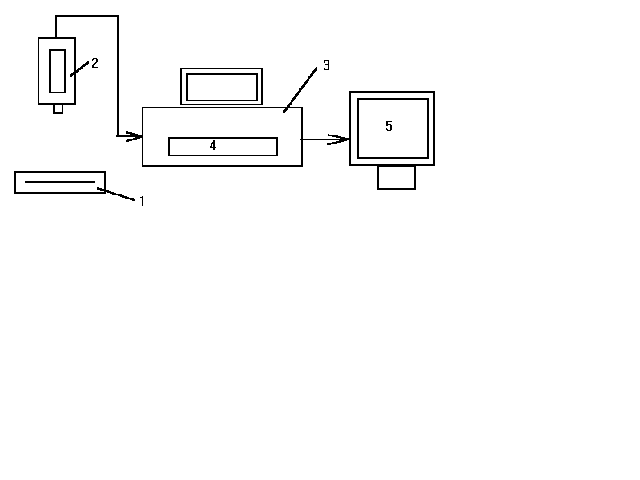
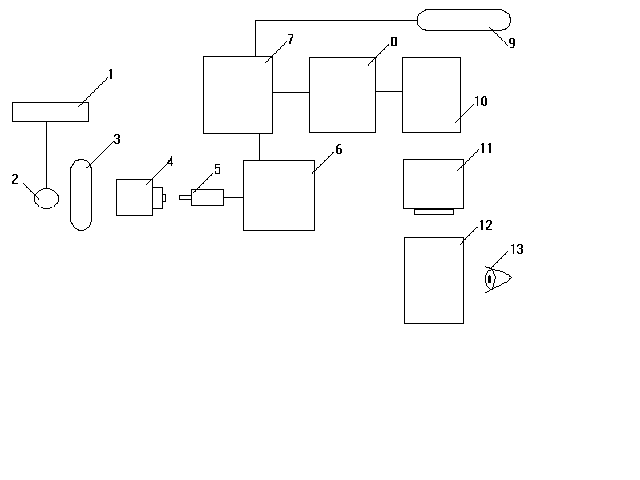
... обычная система электронно-оптического преобразования для просвечивания, из ЭОП, телевизионного тракта с высоким разрешением, рентгеновского высоковольтного генератора и рентгеновского излучателя Рис.5 Цифровая рентгенография с экрана ЭОП 1-генератор; 2-рентгеновская трубка; 3-пациент; 4-ЭОП; 5-видеокамера; 6-аналого-цифровой преобразователь; 7-накопитель изображений; 8-видеопроцессор; 9-сеть; ...
... банковских систем. Наиболее популярны сегодня смешанные решения, при которых часть модулей банковской системы разрабатывается компьютерным отделом банка, а часть покупается у независимых производителей. Основными платформами для банковских систем в настоящее время считаются: 1. ЛВС на базе сервера PC (10,7%); 2. Различные модели специализированных бизнес-компьютеров фирмы IBM типа AS/400 ...
0 комментариев