Навигация
Разработка программной и аппаратной поддержки к методическим указаниям Программирование микроконтроллеров
130405
знаков
7
таблиц
0
изображений
Министерство ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский Государственный Университет
Физический факультет
№______________________ кафедральной регистрации | “К ЗАЩИТЕ ДОПУЩЕНА” Зав. кафедрой физики полупроводников и микроэлектроники проф. __________ Петров Б.К. “____”__________2002 г. |
УДК.681.3 КОРОБКОВ Георгий Николаевич
РАЗРАБОТКА
ПРОГРАММНОЙ
И АППАРАТНОЙ
ПОДДЕРЖКИ К
МЕТОДИЧЕСКИМ
УКАЗАНИЯМ
«ПРОГРАММИРОВАНИЕ
МИКРОКОНТРОЛЛЕРОВ»
Магистерская диссертация по направлению «Физика»
Научный руководитель
доц. ___________ Клюкин В.И.
ВОРОНЕЖ 2002
РЕФЕРАТ
УДК. 681.3 КОРОБКОВ Георгий Николаевич
РАЗРАБОТКА ПРОГРАММНОЙ И АППАРАТНОЙ ПОДДЕРЖКИ К МЕТОДИЧЕСКИМ УКАЗАНИЯМ «ПРОГРАММИРОВАНИЕ МИКРОКОНТРОЛЛЕРОВ». – Магистерская диссертация по направлению «Физика», Воронеж, ВГУ, 2002. – 93 с., илл. 45, табл. 4, прилож. 5, библ. 21 назв.
В настоящее время микроконтроллеры принимают все большее распространение. Однако, информации по вопросам обучения программированию микроконтроллеров в соединении с внешними исполнительными бывает не достаточно.
В работе рассмотрены архитектура, аппаратные и программные средства распространенных и недорогих микроконтроллеров фирмы ATMEL серии AVR типа AT90S1200, AT90S2313, AT90S4414 и AT90S8515. Анализ методики программирования в интегрированной среде разработке позволил объединить практические рекомендации с некоторыми особенностями обучения программирования микроконтроллеров. На основании этого предложен алгоритм обучения.
Предложен макет программатора, который позволяет, как программировать, так и обучать этому процессу. Приведен набор типовых задач которые могут быть реализованы на вспомогательных платах внешних устройств, подключаемых к программатору через соответствующие порты.
Так же приведены решения четырех типовых задач по работе с памятью, индикацией, устройство «кодовый замок» и устройство измерителя частоты звукового диапазона. В приложениях приведены тексты программ и справочные данные на рассмотренные AVR микроконтроллеры.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ 5
1. ОСНОВЫ АРХИТЕКТУРЫ МИКРОКОНТРОЛЛЕРОВ 7
1.1. ОСНОВНЫЕ ТИПЫ МИКРОКОНТРОЛЛЕРОВ И ИХ АРХИТЕКТУРА 7
Система команд. 9
Типы памяти МК. 9
1.2. Аппаратные средства 11
1.2.1. Запуск микроконтроллера 11
Сброс в начальное состояние. 11
1.2.2. Тактирование и командные циклы 11
1.2.3. Программный счетчик и АЛУ 12
1.2.4. Подпрограммы и функции 14
Прерывания. 15
Таймеры. 17
1.2.5. Ввод/вывод данных 18
Аналоговый компаратор. 19
Программирование устройств. 20
Безопасность памяти программ. 21
1.3. Инструментальные и программные средства разработки и отладки 21
Симуляторы 22
Интегрированные среды разработки 23
Язык Ассемблера. 25
Языки программирования высокого уровня. 26
1.4. Основные типы интерфейсов МК. 28
1.4.1. Подключение переключателей и подавление «звона» контактов. 28
1.4.2. Световая индикация. 29
Семи сегментный индикатор. 29
1.4.3. Ввод с матричной клавиатуры. 31
2. ОСОБЕННОСТИ ПОСТРОЕНИЯ И ФУНКЦИОНИРОВАНИЯ МИКРОКОНТРОЛЛЕРОВ ФИРМЫ ATMEL СЕМЕЙСТВА AVR 33
2.1. Архитектура микропроцессорного ядра AVR-микроконтроллеров 33
Программная модель AVR и система команд. 35
Адресация регистров ввода/вывода и памяти SRAM. 36
Программный счетчик и стек 38
Регистр состояния. 40
Прерывания. 41
2.2. Аппаратные средства AVR. 42
Системный тактовый генератор. 42
Таймеры. 42
Сторожевой таймер. 43
Устройство внешнего вывода. 44
Аналоговый ввод/вывод. 45
Конфигурирование МК 46
Память данных EEPROM. 47
Подключение питания и запуск. 48
Программирование в системе. 48
2.3. Система команд микроконтроллера AVR 50
Способы адресации данных 50
Команды пересылки данных. 53
Команды арифметических и логических операций. 54
Команды ветвления 55
Битовые команды и команды тестирования битов. 56
3. ПРОГРАММНОЕ И ИНСТРУМЕНТАЛЬНОЕ ОБЕСПЕЧЕНИЕ ПРОЦЕССА ПРОГРАММИРОВАНИЯ МИКРОКОНТРОЛЛЕРОВ 57
3.1. Написание и отладка программного кода с помощью AVR Studio 57
3.1.1. Обзор AVR Studio 58
3.1.2. Создание нового проекта 59
3.1.3. Исполнение программного кода 63
3.2. Анализ методики реализации разработки программного обеспечения 70
3.2.1. Классификация вариантов заданий 70
Варианты заданий 71
Основные принципы выполнения заданий. 73
3.2.2. Рассмотрение типовых примеров 74
3.3. Описание макета программатора. 78
ЗАКЛЮЧЕНИЕ 81
БИБЛИОГРАФИЧЕСКИЙ СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 82
ПРИЛОЖЕНИЕ 1
Инструкции процессоров AVR. 84
ПРИЛОЖЕНИЕ 2.
Таблица регистров микроконтроллера AT90S1200 89
ПРИЛОЖЕНИЕ 3.
Программа для измерителя звуковой частоты 90
ПРИЛОЖЕНИЕ 4.
Программа для устройства «кодовый замок» 93
ПРИЛОЖЕНИЕ 5.
Основные характеристики микроконтроллеров AVR 95
ВВЕДЕНИЕ
Можно считать что микроконтроллер (МК) – это компьютер, разместившийся в одной микросхеме. Отсюда и его основные привлекательные качества: малые габариты; высокие производительность, надежность и способность быть адаптированным для выполнения самых различных задач.
Микроконтроллер помимо центрального процессора (ЦП) содержит память и многочисленные устройства ввода/вывода: аналого-цифровые преобразователи, последовательные и параллельные каналы передачи информации, таймеры реального времени, широтно-импульсные модуляторы (ШИМ), генераторы программируемых импульсов и т.д. Его основное назначение – использование в системах автоматического управления, встроенных в самые различные устройства: кредитные карточки, фотоаппараты, сотовые телефоны, музыкальные центры, телевизоры, видеомагнитофоны и видеокамеры, стиральные машины, микроволновые печи, системы охранной сигнализации, системы зажигания бензиновых двигателей, электроприводы локомотивов, ядерные реакторы и многое, многое другое. Встраиваемые системы управления стали настолько массовым явлением, что фактически сформировалась новая отрасль экономики, получившая название Embedded Systems (встраиваемые системы).
Достаточно широкое распространение имеют МК фирмы ATMEL, функциональные возможности которых охватывают все перечисленные задачи [1,2].
Применение МК можно разделить на два этапа: первый – программирование, когда пользователь разрабатывает программу и прошивает ее непосредственно в кристалл, и второй – согласование спроектированных исполнительных устройств с запрограммируемым МК. Значительно облегчают отладку программы на первом этапе – симулятор, который наглядно моделирует работу микропроцессора. На втором этапе для отладки используется внутрисхемный эмулятор, который является сложным и дорогим устройством, зачастую недоступным рядовому пользователю.
В тоже время в литературе мало уделено внимания вопросам обучения программированию некоторых недорогих МК, в сочетании с реальными исполнительными устройствами.
Разработка макета программатора отличающегося простотой, наглядностью и низкой себестоимостью, становиться необходимой как для самого программирования кристаллов, так и для наглядного обучения широкого круга пользователей основам программирования МК.
1. ОСНОВЫ АРХИТЕКТУРЫ МИКРОКОНТРОЛЛЕРОВ 1.1. ОСНОВНЫЕ ТИПЫ МИКРОКОНТРОЛЛЕРОВ И ИХ АРХИТЕКТУРА
Если представить все типы современных микроконтроллеров (МК), то можно поразиться огромным количеством разнообразных приборов этого класса, доступных потребителю. Однако все эти приоры можно разделить на следующие основные типы:
Встраиваемые (embedded) 8-разрядные МК;
16- и 32-разрядные МК;
Цифровые сигнальные процессоры.
Промышленностью выпускаются очень широкая номенклатура встраиваемых МК. В них все необходимые ресурсы (память, устройства ввода-вывода и т.д.) располагаются на одном кристалле с процессорным ядром [3]. Если подать питание и тактовые импульсы на соответствующие входы МК, то можно сказать, что он как бы «оживет» и с ним можно будет работать. Обычно МК содержат значительное число вспомогательных устройств, благодаря чему обеспечивается их включение в реальную систему с использованием минимального количества дополнительных компонентов. В состав этих МК входят:
Схема начального запуска процессора (Reset);
Генератор тактовых импульсов;
Центральный процессор;
Память программ (E(E)PROM) и программный интерфейс;
Средства ввода/вывода данных;
Таймеры, фиксирующие число командных циклов.
Общая структура МК показана на рис. 1.1. Эта структура дает представление о том, как МК связывается с внешним миром.
Более сложные встраиваемые МК могут дополнительно реализовывать следующие возможности:
Встроенный монитор/отладчик программ;
Внутренние средства программирования памяти программ (ROM);
Обработка прерываний от различных источников;
Аналоговый ввод/вывод;
Последовательный ввод/вывод (синхронный и асинхронный);
Параллельный ввод/вывод (включая интерфейс с компьютером);
Подключение внешней памяти (микропроцессорный режим).
Все эти возможности значительно увеличивают гибкость применения МК и делают более простым процесс разработки систем на и основе.
Рис. 1.1. Структура микроконтроллера.
Некоторые МК (особенно 16- и 32-разрядные) используют только внешнюю память, которая включает в себя как память программ (ROM), так и некоторый объем памяти данных (RAM), требуемый для данного применения. Они применяются в системах, где требуется большой объем памяти и относительное не большое количество устройств (портов) ввода/вывода. Типичным примером применения такого МК с внешней памятью является котроллер жесткого диска (HDD) с буферной кэш-памятью, который обеспечивает промежуточное хранение и распределение больших объемов данных (порядка нескольких мегабайт). Внешняя память дает возможность такому микроконтроллеру работать с более высокой скоростью, чем встраиваемый МК.
Цифровые сигнальные процессоры (DSP) – относительно новая категория процессоров. Назначение DSP состоит в том, чтобы получать текущие данные от аналоговой системы, обрабатывать данные и формировать соответствующий отклик в реальном масштабе времени. Они обычно входят в состав систем, используясь в качестве устройств управления внешним оборудованием, и не предназначены для автономного применения.
Система команд.В зависимости от числа используемых кодов операций системы команд МК можно разделить на две группы: CISC и RISC. Термин CISC означает сложную систему команд и является аббревиатурой английского определения Complex Instruction Set Computer. Аналогично термин RISC означает сокращенную систему команд и происходит от английского Reduce Instruction Set Computer. Систему команд МК 8051 можно отнести к типу CISC. Однако, не смотря на широкую распространенность этих понятий, необходимо признать, что сами названия не отражают главного различия между системами команд CISC и RISC. Основная идея RISC архитектуры – это тщательный подбор таких комбинаций кодов операций, которые можно было бы выполнить за один такт тактового генератора. Основной выигрыш от такого подхода – резкое упрощение аппаратной реализации ЦП и возможность значительно повысить его производительность.
Очевидно, что в общем случае одной команде CISC соответствует несколько команд RISC. Однако обычно выигрыш от повышения быстродействия в рамках RISC перекрывает потери от менее эффективной системы команд, что приводит к более высокой эффективности RISC систем в целом по сравнению с CISC.
Однако в настоящее время грань между CISC и RISC архитектурой стремительно стирается. Например, МК семейства AVR фирмы Atmel имеют систему команд из 120 инструкций, что соответствует типу CISC. Однако большинство из них выполняется за один такт, что является признаком RISC архитектуры. Сегодня принято считать, что признаком RISC архитектуры является выполнение команд за один такт тактового генератора. Число команд само по себе значения уже не имеет.
Типы памяти МК.Можно выделить три основных вида памяти, используемой в МК:
а) память программ;
б) память данных;
в) регистры МК.
Память программ представляет собой постоянную память, предназначенную для хранения программного кода и констант. Эта память не изменяет содержимого в процессе выполнения программы. Память данных предназначена для хранения переменных в ходе выполнения программы. Регистры МК – этот вид памяти включает внутренние регистры процессора и регистры, которые служат для управления периферийными устройствами.
Для хранения программ обычно служит один из видов постоянной памяти: ROM (масочные ПЗУ), PROM (однократно программируемые ПЗУ), EPROM (электрически программируемые ПЗУ с ультрафиолетовым стиранием) или EEPROM (ПЗУ с электрической записью и стиранием, к этому виду также относятся современные микросхемы Flash-памяти). Все эти виды памяти являются энергонезависимыми – это означает, что содержимое памяти сохраняется после выключения питания МК.
Многократно программируемые ПЗУ – EPROM и EEPROM (Electrically Erasable Programmable Memory) подразделяются на ПЗУ со стиранием ультрафиолетовым (УФ) облучением (выпускаются в корпусах с окном), и МК с электрически перепрограммируемой памятью, соответственно.
В настоящее время протоколы программирования современной EEPROM памяти позволяют выполнять программирование МК непосредственно в составе системы, где он работает. Такой способ программирования получил название – ISP (In System Programming). И теперь можно периодически обновлять программное обеспечение МК без удаления из платы. Это дает огромный выигрыш на начальных этапах разработки систем на базе МК или в процессе их изучения, когда масса времени уходит на многократный поиск причин неработоспособности системы и выполнение последующих циклов стирания-программирования памяти программ.
Функционально Flash-память мало отличается от EEPROM. Основное различие состоит в способности стирания записанной информации. В памяти EEPROM стирание производится отдельно для каждой ячейки, а во Flash-памяти стирание осуществляется целыми блоками.
ОЗУ (RAM) – оперативное запоминающее устройство, используется для хранения данных. Эту память называют еще памятью данных. Число циклов чтения и записи в ОЗУ неограниченно, но при отключение питания вся информация теряется.
1.2. Аппаратные средства 1.2.1. Запуск микроконтроллера
Во многих приложениях используется батарейное питание МК, а в некоторых случаях применяются даже конденсаторы большой емкости, которые обеспечивают сохранение работоспособности при кратковременных отключеньях питания. Поэтому проблема энергопотребления (энергосбережения) весьма актуальна для МК. Так как практически все современные МК производятся по КМОП технологии, то они потребляют значительно меньше мощности, чем ранее выпускавшиеся биполярные или n-МОП – микроконтроллеры.
Сброс в начальное состояние.На рис. 1.3. изображена схема сброса. Эту схему лучшего всего использовать в случаях, когда гарантированно поддержание напряжения питания в рабочем диапазоне. Кнопка RESET используется в процессе разработки устройств для сброса МК в начальное состояние. (См. рис. 1.2. )
Рис. 1.2. Схема RESET.
1.2.2. Тактирование и командные циклыСуществует три способа задания тактовой частоты МК. Первый способ – использование кварцевого резонатора. Второй способ синхронизации – использования RC генератора. Третий способ синхронизации – это подача тактовых импульсов от внешнего генератора. С его помощью можно задать любую частоту синхронизации.
Следует обратить внимание на то, что командные циклы и такты синхронизации не одно и тоже. Командный цикл состоит обычно из нескольких тактов, которые необходимы процессору для выполнения команды. На рис. 1.3, показан командный цикл, состоящий из четырех тактов.
Рис. 1.3. Командный цикл и машинные такты.
В течении командного цикла микропроцессор или микроконтроллер выполняет необходимые операции, используя тактовые сигналы для синхронизации этих операций. Некоторые команды требуют для выполнения более одного командного цикла.
1.2.3. Программный счетчик и АЛУПрограммный счетчик (Program Counter) или счетчик команд (СК) используется для указания следующей команды выполняемой программы. Реализация этой функции значительно усложняется, когда необходимо сохранить содержимое СК при вызове подпрограмм и обработке запросов прерывания или обеспечить ветвление программы. СК представляет собой счетчик с параллельным вводом/выводом. В процессорах с Принстонской архитектурой содержимое СК поступает оп шине данных в схему управления памятью, указывая адрес считываемой команды. Часто СК входит в состав схемы управления памятью – это позволяет избежать передачи адреса по внутренней шине данных. Важные особенности функционирования СК – параллельная загрузка нового содержимого, поступающего с шины данных, возможность сброса (возврат к адресу первой команды программы), реализация инкремента. В 8-разрядных МК разрядность СК обычно больше, чем 8 бит. При загрузки в СК нового адреса, он поступает по шине данных частями по 8-бит, что требует выполнения дополнительных машинных циклов. Чтобы сократить время загрузки СК, некоторые МК имеют команды ветвления, при которых загружается только 8 младших разрядов адреса, а старшие разряды остаются без изменения. При выполнении такой команды достаточно передать по шине данных только один байт, тогда как для загрузки полного 16-разрядного адреса требуется пересылка двух байт.
После чтения очередной команды содержимое СК увеличивается (инкрементируется), чтобы обеспечить переход к адресу следующей команды. Если выполняется вызов подпрограммы или происходит прерывание, то адрес возврата (текущее состояние СК) может быть сохранен в стеке без выполнения дополнительных тактов для инкремента содержимого СК. В работе с МК необходимо следить, чтобы значение СК не вышло за пределы памяти программ. Так как это может привести к выполнению неопределенных команд и непредсказуемому результату.
Арифметико-логическое устройство (АЛУ) процессора используется для выполнения всех математических операций в программе. Это операции включают сложение, вычитание, логическое И, логическое ИЛИ, сдвиг содержимого регистров и установку содержимого регистра состояния в соответствии с полученным результатами. АЛУ не используется при чтении или записи данных или команд, оно служит только для обработки данных.
АЛУ можно представить как аппаратный блок, который обрабатывает два слова данных (операнды) и сохраняет полученный результат (см. рис. 1.4). Как вводятся операнды в АЛУ и куда поступает результат – зависит от конкретного типа МК. В этом состоит одно из основных различий между разными типами процессоров и системами команд. Некоторые МК выбирают один операнд из регистра-аккумулятора и сохраняют результат также в аккумуляторе. Другие МК позволяют использовать различные источники операндов и места размещения результатов.
Рис. 1.4. Структура АЛУ.
АЛУ обычно работает только с положительными целыми числами. Однако при выполнении вычитания получаются отрицательные числа, если вычитаемое больше уменьшаемого. Для представления отрицательных чисел используется дополнительный код – «дополнение до двух». Это необходимо учитывать при знакомстве с работой АЛУ.
Вместо вычитания одного числа из другого, происходит добавление отрицательного числа:
А – В = А + (-В),
где отрицательное число (-В) представляется в дополнительном коде. Чтобы получить дополнительный код отрицательного двоичного числа, необходимо инвертировать значение каждого бита, а затем прибавить единицу:
-В = ( В ^ 0хff ) + 1, где ^ - операция «исключительное или».
Сложность АЛУ во многом определяет сложность всего МК в целом. Часто над созданием АЛУ работает группа разработчиков, сравнимая по составу с той, которая работает над остальной частью микропроцессора или микроконтроллера. От того, как работает АЛУ, зависит функционирование процессора, входящего в состав МК, а значит и всего МК в целом.
1.2.4. Подпрограммы и функцииПри вызове подпрограммы или функции требуется сохранить содержимое СК для того, чтобы команда возврата могла вернуть управление исходной программе. Это может выполняться автоматически путем сохранения адреса возврата в сетке. При возврате к исходной программе адрес извлекается из стека и загружается в СК. Вызов функции может быть реализован в МК, не имеющих стека, путем использования индексного регистра для эмуляции стека. Если нельзя непосредственно загрузить в стек содержимое СК, то адрес возврата к исходной программе можно сохранить в эмулированном стеке.
Иногда приходится передавать функции некоторые параметры. Один из самых эффективных и часто встречаемых способов передачи параметров в функцию – это поместить их в стек перед вызовом функции. В подпрограмме можно загрузить индексный регистр значения указателя стека и таким образом получить доступ к параметрам.
Другим способом передачи параметров является их сохранение в регистрах процессора или в памяти данных в качестве специальных переменных. Передача параметров через регистры сокращает число регистров, доступных при выполнении функции. Сохранение же параметров в виде специальных переменных уменьшает объем памяти, доступной для использования программой. Данное ограничение может быть весьма существенно для МК. Обычно значения возвращаемых параметров загружаются в регистры процессора, т.к. это наиболее быстрый и эффективный способ передачи данных.
Прерывания.Прерывание – это запуск специальной подпрограммы (называемой «обработчиком прерывания» или «программой обслуживания прерывания»), который вызывается сигналом аппаратуры. На время выполнения этой подпрограммы реализация текущей программы останавливается(см. рис.1.5). Термин «запрос на прерывание» (interrupt request) используется потому, что иногда программа отказывается подтвердить прерывание и выполнить обработчик прерывания немедленно.
Рис. 1.5. Выполнение прерываний.
МК может не реагировать на прерывания, пока не завершится выполнение текущей задачи – этот реализуется путем запрещения (маскирования) обслуживания запроса прерывания. После решения задачи возможен один из двух вариантов: сброс маски и разрешение обслуживания прерывания, что приведет к вызову обработчика прерывания, или анализ значения битов, указывающих на поступление запросов прерывания и непосредственное выполнение программы обслуживания без вызова обработчика прерывания. Такой метод обработки прерывания используется, когда требуется обеспечить заданное время выполнения основной программы, так как любое пребывание может нарушить реализацию необходимого интерфейса.
Обработчик всегда обеспечивает следующую последовательность действий:
Сохранить содержимое регистров контекста.
Сбросить контроллер прерываний и оборудование, вызвавшее запрос.
Обработать данные.
Восстановить содержимое регистров контекста.
Вернуться к прерванной программе.
Регистры контекста – это регистры, определяющие текущее состояние выполнения основной программы. Обычно к их относят СК, регистры состояния и аккумулятор. Другие регистры МК, такие как индексные регистры, могут быть использованы в процессе обработки прерывания, поэтому их содержимое также необходимо сохранить. Все остальные регистры являются специфическими для конкретного типа МК и его применения.
После сброса в исходное состояние контроллер прерываний готов воспринимать следующий запрос, а оборудование, вызывающее прерывание, готово посылать запрос, когда возникают соответствующие причины. Если поступит новый запрос прерывания, то регистр маскирования прерываний процессора предотвратит обработку прерывания, но регистр состояния прерываний зафиксирует этот запрос, который будет ожидать своего обслуживания. После завершения обслуживания текущего прерывания маска прерывание будет сброшена, и вновь поступивший запрос поступит на обработку.
Вложенные прерывания сложны некоторым типам МК, которые не имеют стека. Эти прерывания так же могут вызывать проблемы, связанные с переполнением стека.
Иногда МК может быстро отреагировать на запрос прерывания, приняв необходимые данные, которые будут потом использованы после решения текущей задачи. Это реализуется путем сохранения поступивших данных в массиве памяти и последующей их обработки, когда выполнение исходной программы буде завершено. Такой способ обслуживания является хорошим компромиссом между немедленной полной обработкой прерывания, которая может потребовать много времени, и игнорированием прерывания, что может привести к потере информации о событии, вызвавшем прерывание.
При обработке прерывания содержимое регистра состояния обычно (но не всегда) автоматически сохраняется вместе с содержимым СК перед обработкой прерывания. Это избавляет от необходимость сохранять его в памяти программными средствами с помощью команды пересылки, а затем восстанавливать при возврате к исходной программе. Однако такое автоматическое сохранение реализуется не во всех типах МК.
Если содержимое регистра состояния сохраняется перед началом обработки прерывания, то по команде возврата производится его автоматическое обновление. Если содержимое других регистров изменяется при выполнении обслуживания прерывания, то оно также должно быть сохранено в памяти до изменения и восстановлено перед возвратом в основную программу.
«Вектор прерывания» – это адрес, который загружается в СК при переходе к обработчику прерывания. Существует несколько типов векторов. Адрес, который загружается в СК при запуске МК (RESET) называется «вектор сброса». Для различных прерываний могут быть заданы различные вектора. Но иногда различным прерываниям назначается один вектор. Это не должно вызвать проблем при работе с МК, так как чаще всего он исполняет одну единственную программу. В МК, где аппаратная часть хорошо известна, не должно возникнуть каких либо проблем при совместном использовании векторов прерываний.
В заключении можно добавить, что системные подпрограммы – это своего рода программные прерывания, которые с помощью специальных процессорных команд имитируют аппаратные прерывания. Они располагаются в произвольном месте памяти, или могут требовать для обращения к ним межсегментных переходов.
Таймеры.Таймеры в микропроцессорных системах используются не только для обеспечения заданной задержки, но и для решения гораздо более широкого круга задач. Обычно для переключения таймера используют тактовые импульсы процессора. Загрузив в таймер начальное значение, можно отсчитывать определенные интервалы времени, фиксируя окончание интервала по моменту переполнения таймера. Часто перед таймером включают предварительный делитель тактовой частоты, чтобы иметь возможность отсчитывать более длинные интервалы времени. Делитель обеспечивает инкремент содержимого таймера после поступления определенного числа тактовых импульсов.
Их можно использовать для точного формирования временных интервалов, подсчета импульсов на выходах МК, формирования последовательности импульсов, тактирования приемопередатчика последовательного канала связи. Таймеры/счетчики способны вырабатывать запросы прерываний, переключая ЦП на их обслуживание по событиям и освобождая его от необходимости периодического опроса состояний таймеров. Поскольку основное применение МК находят в системах реального времени, таймеры/счетчики являются их обязательным элементом. В некоторых модификациях число таймеров достигает 32.
1.2.5. Ввод/вывод данныхОсновной интерфейс между МК и внешними устройствами реализуется через параллельные порты ввода/вывода. Во многих МК выводы этих портов служат также для выполнения других функций, например последовательного или аналогового ввода/вывода.
Во многих МК отдельные выводы портов могут быть запрограммированы на ввод или вывод данных. Необходимо обратить особое внимание на то, при вводе данных считывается значение сигнала, поступающего на внешний вывод, а не содержимое триггера данных. Если к внешнему выводу подключены выводы других устройств, то они могут установить свой уровень выходного сигнала, который будет считан вместо ожидаемого значения данных, записанных в триггер. В некоторых МК существует возможность выбора между чтением данных, установленных на выходе триггера или на внешнем выводе.
Когда на шину необходимо вывести «0» или «1», то сначала записывают соответствующее значение в триггер данных, а затем с помощью триггера управления на выходе устанавливается необходимый уровень потенциала. Триггер управления разрешает вывод данных на шину. В современных МК обеспечивается индивидуальный доступ к триггерам данных и управления с помощь адресной шины.
Внешний вывод может быть также использован для подачи запроса прерывания. Это обычно реализуется, когда вывод работает в режиме ввода.
Наиболее распространенный вид связи между различными электронно-вычислительными системами – это последовательный обмен. В этом случае байт данных передается по единственному проводу бит за битом с обеспечением синхронизации между приемником и источником данных. Очевидное преимущество последовательной передачи данных состоит в том, что она требует небольшого количества линий связи.
Существует множество стандартных последовательных протоколов передачи данных. В некоторых МК эти протоколы реализуются внутренними схемами, размещенными на кристалле, что позволят упростить разработку различных приложений.
Аналоговый компаратор.Часто в МК встраивается аналоговый компаратор напряжений. Компаратор представляет собой простую схему, которая, которая сравнивает два напряжения. Обычно один сигнал называют входным, а другой опорным.[7] На выходе устанавливается «1», если входное напряжение больше, чем опорное (см. рис. 1.6). этот способ наиболее удобно использовать в таких устройствах, как термостаты, где необходимо контролировать достижение определенного уровня измеряемой величины, которая задается значением входного напряжения.
Рис. 1.6. Сигналы на входе и выходе аналогового компаратора.
Программирование устройств.Программирование устройств, в том числе и микроконтроллеров обычно происходит следующим образом. В регистр программатора загружается значение, которое необходимо разместить по определенному адресу, затем включается схема, которая пересылает содержимое этого регистра по заданному адресу, проходит некоторое время ожидания, пока завершиться процесс программирования выбранной ячейки памяти и, на конец, выполняется верификация, т.е. проверяется правильность записанного значения. Программирование всего устройства может занять от нескольких секунд до нескольких минут в зависимости от размера памяти и алгоритма программирования.
Часто оборудования для программирования оказывается слишком дорогим, особенно для радиолюбителей и предприятий малого бизнеса. Но в некоторых случаях для программирования требуется весьма простое и доступное оборудование. К примеру, некоторые модели PIC и AVR микроконтроллеров программируются очень легко. Существует также устройства, которые не требуют оборудования для программирования, на пример, МК Basic STAMP, или имеют встроенный аппаратно-программный блок, избавляющий от необходимости использования внешнего оборудования, кроме источника повышенного напряжения для программирования, как МК 68НС05.
Очень важный аспект, касающийся программирования устройств, заключается в том, что может ли устройство быть запрограммировано в системе. Это называется внутрисистемное программирование (ВСП) – от английского In-System Programming (ISP). Если МК допускает возможность такого программирования, то это означает, что он может быть смонтирован на плату с пустой памятью программ, которая затем может быть запрограммирована без какого либо влияния на остальные компоненты схемы. Это может стать важным обстоятельством при выборе МК. Использование ВСП избавляет МК от необходимость покупать специальный программатор, дает возможность обновлять программное обеспечения без изменения расположенных на плате аппаратных средств и позволяет производителям создавать запас готовых изделий, которые могут легко модифицироваться в соответствии с поступающими заказами.
Безопасность памяти программ.Для многих приложений желательно защитить программный код, записанный в МК. Чтобы обеспечить такую возможность многие МК содержат специальные средства для предотвращения считывания хранящихся в них программ. Часто такая возможность реализуется путем установки определенного значения конфигурационного бита в процессе программирования. Обычно значения этого бита можно изменить только в процессе перепрограммирования содержимого памяти МК, например при УФ стирании содержимого EPROM.
Встроенная защита не может предотвратить все возможности считывания программного кода. Такое считывание можно произвести во многих лабораториях, выполняющих анализ причин отказов микросхем, причем за очень короткое время. Чтобы усложнить и сделать операцию считывания менее эффективной, некоторые компании зашифровывают записанные программы путем перемешивания команд и включают специальные аппаратные блоки, которые преобразуют перемешенные данные в поток команд процессора. И все же, установка бита защиты не может гарантировать абсолютную защиту программного кода загруженного в МК.
1.3. Инструментальные и программные средства разработки и отладкиСамый эффективный способ отладки программ для МК – применение специализированных профессиональных инструментальных отладочных средств, к которым следует отнести:
внутрисхемные эмуляторы (ВСЭ) – программно аппаратное средство, способное замещать собой эмулируемый процессор в реальном устройстве;
программные симуляторы – программное средство способное имитировать работу МК и его памяти;
мониторы отладки – специальная программа, загружаемая в память отлаживаемой системы.
платы развития (Evaluation Boards – оценочные платы) – своеобразные конструкторы для макетирования прикладных систем;
эмуляторы ПЗУ – программно-аппаратное средство, позволяющее заменить ПЗУ отлаживаемого устройства на ОЗУ, в которое можно загрузить программу с компьютера через один из стандартных каналов связи.
Помимо этого существуют и комбинированные устройства и наборы.
СимуляторыКак правило, симулятор состоит из отладчика, модели ЦП и памяти. Более совершенные устройства содержат в своем составе модели встроенных периферийных устройств (таймеров, портов, АЦП и систем прерываний).
Симулятор должен уметь загружать файлы программ в всех популярных форматах, максимально полно отображать информацию о состоянии ресурсов симулируемого МК, а также предоставлять возможности по симуляции выполнения загружаемой программы в различных режимах. В процессе отладки модель выполняет программу, и на экране монитора компьютера отображается текущее состояние модели.
Загрузив программу в симулятор, пользователь может запускать ее пошаговом или непрерывном режиме, задавать условные или безусловные точки останова, контролировать и свободно модифицировать содержимое ячеек памяти и регистров симулируемого МК. Симулятор позволяет быстро проверить логику выполнения программы, правильность выполнения арифметических операций.
В зависимости от класса используемого отладчика некоторые модели симуляторов поддерживают высокоуровневую отладку программ.
Симулятор может содержать и ряд дополнительных программных средств, например интерфейс внешней среды. Наличие такого интерфейса позволяет создавать и гибко использовать модель внешней среды МК, функционирующую и воздействующую на отлаживаемую программу по заданному алгоритму.
В реальной системе МК обычно «занимается» считыванием информации с подключенных к нему устройств (датчиков), обработкой ее и выдачи управляющих сигналов на исполнительные устройства. Для того чтобы в простом симуляторе смоделировать работу датчика, нужно в ручную изменять текущее состояние модели периферийного устройства, к которому в реальной системе подключен датчик. Но существует ряд современных разработок программных симуляторов, в которых чтобы имитировать внешние условия и ситуации, обычно используется специальный файл входных воздействий. Этот файл задает последовательность входных сигналов, поступающих на моделируемое устройство.
К примеру, для микроконтроллеров AVR этот входной файл программного симулятора может выглядеть следующим образом:
000000000:00
000000006:F1
000000015:18
000000109:1C
000000203:61
000000250:10
000000344:1F
000000391:71
999999999:ff
где каждая строка содержит – цикл:данные , поступающие на какой либо указанный порт.
В некоторых моделях симуляторов эта проблема имитации внешних сигналов решена таким образом, что симулятор имеет встроенное средство для создания моделей подключенных к МК внешних устройств, включая средства графического отображения информации.
Очевидная особенность программных симуляторов в том, что загруженные в них программы выполняются в масштабе времени, отличном от реального. Однако низкая цена, возможность отладки даже при отсутствии макета отлаживаемого устройства делают программные симуляторы весьма привлекательным средством отладки. Необходимо также отметить, что существует целый класс ошибок, которые можно обнаружить только с помощью симулятора.
Интегрированные среды разработкиИдея единства программного и аппаратного обеспечения систем на базе МК является очень важной. Объединение инструментальных средств разработки программного обеспечения с инструментальными средствами разработки аппаратного обеспечения может стать важным преимуществом при разработке устройств.
Существенно облегчают и ускоряют процесс разработки и отладки микропроцессорных систем, так называемые интегрированные среды разработки. Они совмещают в себе текстовый редактор для написания исходных текстов, трансляторы с ассемблера и Си, линкер, отладчик, справочную информацию по МК и другие средства, необходимые разработчику. Настройка трансляторов, линкера и других компонентов производится не методом указания ключей в командной строке, а в виде диалоговых окон, где нужно только расставить «галочки» в нужных местах. Преобразование исходных текстов программ в файл машинных кодов запускается нажатием одной клавишей.
Появление интегрированных сред разработки программ ещё больше повысило эффективность создания программ для МК, позволило разработчику сосредоточиться на сути решаемой задачи и отвлечься от конкретных деталей ее реализации. Интегрированные пакеты для разработки программ выпускают несколько фирм, пакеты разных производителей схожи между собой по функциям, но различаются предоставляемыми сервисными возможностями, удобством работы и качеством генерированного машинного кода.
Напомним, что при традиционном подходе начальный этап написания программ строится следующим образом. Исходный текст набирают с помощью какого либо текстового редактора. По завершению набора работа с текстовым редактором прекращается и запускается кросс-компилятор. Как правило, новая программ содержит синтаксические ошибки, и компилятор сообщает о них на консоль оператора. Затем вновь запускается текстовый редактор, и оператор ищет и устраняет выявленные ошибки. При этом сообщение об их характере, выведенные компилятором уже не видны, так как экран занят текстовым редактором.
Этот цикл может повторяться не один раз. И если программа относительно сложна, собирается из различных частей, подвергается редактированию или модернизации, то даже этот начальный этап может потребовать очень много сил и времени программиста.
Избежать рутинной работы и тем самым существенно повысить производительность труда программиста позволяет появившиеся и быстро завоевывающие популярность так называемые интегрированные среды (оболочки) разработки (Integrated Development Environment – IDE).
Как правило, хорошая интегрированная среда объединяет имеющиеся средства отладки (внутрисхемный эмулятор, программный симулятор и программатор) и обеспечивает работу программиста с текстами программ в стиле диалоговых окон.
Интегрированная среда позволяет:
использовать встроенный многофайловый текстовый редактор, специально ориентированный на работу с исходными текстами программ;
наблюдать одновременно в многооконном режиме диагностику выявленных при компиляции ошибок и исходный текст программы доступный редактированию;
вести параллельную работу над несколькими проектами. Менеджер проектов позволяет использовать любой проект в качестве шаблона для вновь создаваемого. Опции используемых компиляторов и список исходных файлов проекта устанавливаются в диалоговых меню и сохраняются в рамках проекта, устраняя необходимость работы с неудобными bat – файлами:
подвергать перекомпиляции, только редактировавшиеся модули;
загружать отлаживаемую программу в имеющиеся средства отладки и работать с ними без выхода из оболочки;
подключать к оболочки практически любые программные средства.
В последнее время функции интегрированных сред разработки становится принадлежностью программных интерфейсов наиболее «продвинутых» эмуляторов и отладчиков симуляторов. Такие функциональные возможности в сочетании с дружественным интерфейсом существенно ускоряют работу программиста.
Таким образом, выбирая инструментальные средства отладки, целесообразно принимать в расчет следующий комплекс показателей: перечень поддерживаемых МК, ограничения на ресурсы эмулируемых/симулируемых МК, возможность символьной отладки, перечень поддерживаемых компиляторов и, наконец, сервисные возможности.
Язык Ассемблера.Прежде чем начать разработку какого либо устройства на база МК очень важно познакомиться с основами программирования на языке Ассемблера. При создании приложений для МК следует не только освоить этот метод программирования, но и научиться хорошо понимать, как шаг за шагом выполняется ваша программа, и что при этом происходит в устройстве.
Чтобы процесс изучения языка, написание и отладка программ на Ассемблере был более простым и понятным, существует несколько приемов. Во-первых – использование визуализации процедур выполнения команд процессором. Во-вторых – применение методов структурного программирования, чтобы сделать программы более простыми для чтения и понимания.
Визуализацию выполнения команд лучше всего осуществлять, используя структурную схему процессора или МК, на которой отмечается прохождение данных при выполнении каждой команды. В результате обеспечивается хорошее визуальное представление процесса выполнения команд.
Языки программирования высокого уровня.Для программирования МК можно использовать различные языки высокого уровня. Термин «язык высокого уровня» служит для обозначения языков, используемых для написания легко читаемых программ, которые конвертируются (компилируются) в язык ассемблера, а затем преобразуются в объектный код (биты и байты) для их выполнения микроконтроллером.
Перечислим основные характеристики языков высокого уровня:
наличие встроенных функций (например, консольный ввод/вывод) с подключаемыми библиотеками;
разнообразные типы данных (8-, 16-, 32-битные и с плавающей точкой);
выполнение арифметических операций с использованием стека;
использование локальных и глобальных переменных, указателей и структур данных;
распределение памяти;
доступ к аппаратным регистрам;
символическая информация для симулятора/эмулятора.
Реализация этих характеристик может быть проблематичной для встраиваемых МК, которые обладают следующими особенностями:
ограниченный объем памяти программ ROM и памяти данных RAM;
отсутствие BIOS или операционной системы;
переопределяемый ввод/вывод (когда вывод может использоваться как цифровой/аналоговый/последовательный вход/выход).
Таким образом, использование ассемблера необходимо, если к размеру и быстродействию генерируемого кода предъявляются очень жесткие требования. В настоящее время таких случаев становится все меньше и меньше, т.к. практически всегда можно взять более «быстрый» МК с большим объемом памяти. Кроме того, современные пакеты кросс средств позволяют легко писать смешанные программы, где часть модулей написана на Си, а наиболее критичные к быстродействию части – на ассемблере. Компиляторы Си позволяют также вставлять в исходные тексты ассемблерные инструкции.
При разработке программного обеспечения для МК существует несколько правил, которые следует выполнять, чтобы объем используемых ресурсов не превысил доступный предел.
Использовать только один вид интерфейса с аппаратными средствами (внешними устройствами). Применения различных интерфейсов создает проблемы, если потребуется подключать другие типы внешних устройств.
Идентифицировать глобальные переменные, специфичные для подпрограмм, и не использовать их где-нибудь еще в коде.
Использовать везде, где возможно, локальные переменные (это можно реализовать только в языках высокого уровня).
Если предполагается наличие временно используемых переменных, то программа должна обеспечить их уникальное использование.
Следование этим правилам при разработке прикладных программ избавит вас в дальнейшем от проблем, связанных с устранением трудно выявляемых неустойчивых ошибок в программе.
1.4. Основные типы интерфейсов МК. 1.4.1. Подключение переключателей и подавление «звона» контактов.При замыкании и размыкании переключателей в цепи возникают импульсные помехи, вызванные дребезгом контактов. Эти помехи обычно называют «шумом» или «звоном». Такое явление часто возникает в системах на базах МК, где для ввода данных используется клавиатура, и «звон» может восприниматься как многократное нажатие клавиши (см. рис. 1.7). «Звон» возникает при установке и разрыве контакта путем нажатия на клавишу.
а) б)
Рис. 1.7. а) схема ключа; б) дребезг контактов.
Чтобы устранить данный эффект, используются специальные схемы или программные методы для подавления «звона». Один из простых схемотехнических способов устранения «звона» состоит в подключении RC-цепи. В этой схеме время, требуемое для заряда разряда конденсатора до порогового напряжения, маскирует «звон» контактов при переключении. Можно также установить триггер Шмитта между схемой ключа и МК, чтобы усилить эффект подавления «звона». Недостатки этого метода – дополнительные затраты на компоненты, которые должны быть установлены на плате, и дополнительное время, требуемое для заряда/разряда RC-цепи. Все это может затруднить использование данной схемы, так как для некоторых ключей с большим уровнем шумов дополнительная задержка может составить десятые доли секунды. Значительно лучший способ избавиться от «звона» – сделать это программно. Если уровень напряжения на выходе ключа не изменяется в течении 20мс, то можно считать, что «звон» окончился, и больше изменения состояний не ожидается.
1.4.2. Световая индикация.Очень часто вывод данных реализуются с помощью светодиодов LED (Light Emitting Diode), которые достаточно дешевы и легко подключаются к МК. Обычно для свечения светодиода требуется ток более 16 мА, что для большинства МК находится в диапазоне допустимых значений выходных токов. Следует помнить, что светодиод является диодом, пропуская ток только в одном направлении.
Типичная схема подключения светодиода к выводу МК показана на рис. 1.8. В этой схеме светодиоды будут светиться когда МК выдает сигнал «0» (низкое напряжение). Когда вывод работает в качестве входа данных или на него выводится «1», то светодиод будет выключен.
Резистор сопротивлением 220 Ом используется для ограничения тока, т.к. слишком большой ток может вывести из строя МК и светодиод. Некоторые МК содержат ограничители тока на выходных линиях, что устраняет потребность в ограничивающем резисторе. Но все же целесообразно, на всякий случай, включить этот резистор, чтобы гарантировать, что короткое замыкание на «землю» или напряжение питания Vcc, не выведет из строя МК.
Рис. 1.8. Подключение светодиода к микроконтроллеру.
Семи сегментный индикатор.Вероятно самый простой вывод числовых десятичных и шестнадцатеричных данных – это использование семи сегментного индикатора (ССИ). Такие индикаторы были очень популярны в 70х годах, но в последствии их место заняли жидкокристаллические индикаторы (ЖКИ). Но светодиодные индикаторы до сих пор являются полезными приборами, которые могут быть включены в схему без больших усилий для создания программного обеспечения. Включая определенные светодиоды (зажигая сегменты), можно выводить десятичные числа (см. рис. 1.9).
Каждый светодиод в индикаторе имеет свой буквенный идентификатор (A, B, C, D, E, F, G), и одна из ножек светодиода подключена к соответствующему внешнему выводу. Вторые ножки всех светодиодов соединены вместе и подключены к общему выводу. Этот общий вывод определяет тип индикатора: с общим катодом или с общим анодом.
Подключение индикатора к МК осуществляется весьма просто: обычно индикатор подключают как семь или восемь (если используется десятичная точка) независимых светодиодов. Наиболее важной частью работы при подключении к МК нескольких ССИ является назначения линий вводе вывода для каждого светодиода. Решение этой задачи в начале выполнения проекта упростит вам монтаж разводки и отладку устройств в дальнейшем. Типичный способ подключения нескольких индикаторов состоит в том, чтобы включить их параллельно и затем управлять протеканием тока через общие выводы отдельных индикаторов. Так как величина этого тока обычно превышает допустимое значение выходного тока МК, то для управления оком включается дополнительные транзисторы, которые выбирают, какой из индикаторов будет находиться в активном состоянии.
Рис. 1.9. Семи сегментный индикатор.
На рис. 1.10 показано подключение к МК четырех ССИ. В этой схеме МК выдает данные для индикации, последовательно переходя от одного индикатора к другому. Каждая цифра будет высвечиваться в течении очень короткого интервала времени. Это обычно выполняется с помощью подпрограммы обслуживания прерываний таймера. Чтобы избежать мерцания изображения, подпрограмма должна выполняться со скоростью, обеспечивающий включение индикатора, по крайней мере, 50 раз в секунду. Чем больше цифр, тем чаще должны следовать прерывания от таймера. Например, при использовании восьми ССИ цифры должны выводиться со скоростью 400 раз в секунду.
Рис. 1.10. Подключение к МК четырех ССИ.
1.4.3. Ввод с матричной клавиатуры.Во многих приложениях требуется производить ввод данных с клавиатуры. Это может быть реализовано при помощи отдельных кнопок, но такой подход слишком расточителен с точки зрения использования линий ввода/вывода МК. Лучшим решением является использование матричной клавиатуры, которая представляет собой набор ключей, объединенных в ряды и столбцы (см. рис. 1.11).
Рис. 1.11. Подключение к МК матричной клавиатуры.
Для чтения состояния определенного ключа на столбец подается сигнал, а затем считывается состояние рядов. Обычно ряды подключаются к высокому потенциалу, а опрашиваемый столбец соединяется с землей. Если при сканировании считывается низкий уровень сигнала, то это означает, что ключ в данной позиции ряд-столбец замкнут. На рис. 1.11 показаны два МОП-транзистора, которые используются для подключения столбцов к земле. Но в некоторых МК выводы могут работать в режиме с открытым коллектором, и следовательно имитировать работу этих транзисторов, делая их включение ненужным.
Матричная клавиатура может быть расширена практически до любого размера, используя при этом небольшое число выводов МК. Например, 104-клавишная клавиатура ПК – это матрица, содержащая 13х8 ключей.
2. ОСОБЕННОСТИ ПОСТРОЕНИЯ И ФУНКЦИОНИРОВАНИЯ МИКРОКОНТРОЛЛЕРОВ ФИРМЫ ATMEL СЕМЕЙСТВА AVR
2.1. Архитектура микропроцессорного ядра AVR-микроконтроллеров
Архитектура AVR была оптимизирована так, чтобы соединить достоинства Гарвардской и Принстонской (Фон Неймана) архитектуры для достижения очень быстрого и эффективного выполнения программ. Такая организация обеспечивает высокую эффективность процессора при обработке данных.
Основной идеей всех RISC (Reduced Instruction Set Computer), как известно, является увеличение быстродействия за счет сокращения количества операций обмена с памятью программ. Для этого каждую команду стремятся уместить в одну ячейку памяти программ. При ограниченной разрядности ячейки памяти это неизбежно приводит к сокращению набора команд микропроцессора.
У AVR-микроконтроллеров в соответствии с этим принципом практически все команды (исключая те, у которых одним из операндов является 16-разрядный адрес) также упакованы в одну ячейку памяти программ. Но сделать это удалось не за счет сокращения количества команд процессора, а путем расширения ячейки памяти программ до 16 разрядов. Такое решение является причиной богатства системы команд AVR по сравнению с другими RISC-микроконтроллерами.
Организация памяти AVR выполнена по схеме Гарвардского типа, в которой разделены не только адресные пространства памяти программ и памяти данных, но также и шины доступа к ним. Для более углубленного понимания архитектуры приведем две схемы (см. рис. 2.1 и 2.2).
Вся программная память AVR-микроконтроллеров выполнена по технологии FLASH и размещена на кристалле. Она представляет собой последовательность 16-разрядных ячеек и имеет емкость от 512 слов до 64K слов в зависимости от типа кристалла.
Разделение шин доступа (рис. 2.2.) к FLASH памяти и SRAM памяти дает возможность иметь шины данных для памяти данных и памяти программ различной разрядности, а также использовать технологию конвейеризации. Конвейеризация заключается в том, что во время исполнения текущей команды программный код следующей уже выбирается из памяти и дешифрируется.
Рис. 2.1. Архитектура AVR-микроконтроллеров.
Рис. 2.2. Структурная схема архитектуры процессора семейства AVR.
Для сравнения вспомним, что у микроконтроллеров семейства MCS-51 выборка кода команды и ее исполнение осуществляются последовательно, что занимает один машинный цикл, который длится 12 периодов кварцевого резонатора.
В случае использования конвейера приведенную длительность машинного цикла можно сократить. Например, у PIC-микроконтроллеров фирмы Microchip за счет использования конвейера удалось уменьшить длительность машинного цикла до 4 периодов кварцевого резонатора. Длительность же машинного цикла AVR составляет один период кварцевого резонатора. Таким образом, AVR способны обеспечить заданную производительность при более низкой тактовой частоте. Именно эта особенность архитектуры и позволяет AVR-микроконтроллерам иметь наилучшее соотношение энергопотребление/производительность, так как потребление КМОП микросхем, как известно, определяется их рабочей частотой [9,11].
Программная модель AVR и система команд.На рисунке 2.3 изображена программная модель AVR-микроконтроллеров, которая представляет собой диаграмму программно доступных ресурсов AVR. Центральным блоком на этой диаграмме является регистровый файл из 32 оперативных регистров (R0-R31) или как их обычно называют регистры общего назначения (РОН). Все РОН непосредственно доступны АЛУ. Старшие регистры (см. рис. 2.4.) объединены парами и образуют три 16-разрядных регистра, предназначенных для косвенной адресации ячеек памяти (AVR без SRAM имеют только один 16-битный регистр Z).
Рис. 2.3. Программная модель AVR-микроконтроллеров.
Регистровый файл, блок регистров ввода/вывода и оперативная память, как показано на рис. 2.3, образуют единое адресное пространство, что дает возможность при программировании обращаться к 32 оперативным регистрам и к регистрам ввода/вывода как к ячейкам памяти, используя команды доступа к SRAM (в том числе и с косвенной адресацией) [8].
Все арифметические и логические операции, а также часть операций работы с битами выполняются в АЛУ только над содержимым РОН. Следует обратить внимание, что команды, которые в качестве второго операнда имеют константу (SUBI, SBCI, ANDI, ORI, SBR, CBR), могут использовать в качестве первого операнда только регистры из второй половины РОН (R16-R31). Команды 16-разрядного сложения с константой ADIW и вычитания константы SBIW в качестве первого операнда используют только регистры R24, R26, R28, R30.
Рис. 2.4. Регистровый файл или РОН.
Во время выполнения арифметических и логических операций или операций работы с битами АЛУ формирует те или иные признаки результата операции, то есть устанавливает или сбрасывает биты в регистре состояния SREG (Status Register) (см. рис. 2.5).
Признаки результата операции могут быть затем использованы в программе для выполнения дальнейших арифметико-логических операций или команд условных переходов.
Адресация регистров ввода/вывода и памяти SRAM.Регистры ввода/вывода, также изображенные на рис. 1, представляют собой набор регистров управления процессорного ядра и регистров управления и данных аппаратных узлов AVR-микроконтроллера. Регистрами ввода/вывода являются регистры SREG, MCUSR и указатель стека SPH:SPL а также регистры, управляющие системой прерывания микроконтроллера, режимами подключения EEPROM памяти, сторожевым таймером, портами ввода/вывода и другими периферийными узлами. Изучение данных регистров удобно выполнять одновременно с изучением конкретного периферийного узла.
Все регистры ввода/вывода могут считываться и записываться через РОН при помощи команд IN, OUT (см. группу команд передачи данных приложение 1). Регистры ввода/вывода, имеющие адреса в диапазоне $00 - $1F (знак $ указывает на шестнадцатеричную систему счисления), обладают возможностью побитовой адресации. Непосредственная установка и сброс отдельных разрядов этих регистров выполняется командами SBI и CBI (см. группу команд работы с битами приложение 1). Для признаков результата операции, которые являются битами регистра ввода/вывода SREG, имеется целый набор команд установки и сброса. Команды условных переходов в качестве своих операндов могут иметь как биты-признаки результата операции, так и отдельные разряды побитно адресуемых регистров ввода/вывода.
На рис. 2.3 показано распределение адресов в едином адресном пространстве. Младшие 32 адреса ($0 - $1F) соответствуют оперативным регистрам т.е. РОН. Следующие 64 адреса ($20 - $5F) зарезервированы для регистров ввода/вывода. Внутренняя SRAM у всех AVR начинается с адреса $60.
Таким образом, регистры ввода/вывода имеют двойную нумерацию. Если используются команды IN, OUT, SBI, CBI, SBIC, SBIS, то следует использовать нумерацию регистров ввода/вывода, начинающуюся с нуля (назовем ее основной). Если же к регистрам ввода/вывода доступ осуществляется как к ячейкам памяти, то необходимо использовать нумерацию единого адресного пространства оперативной памяти данных AVR. Очевидно, что адрес в едином адресном пространстве памяти данных получается путем прибавления числа $20 к основному адресу регистра ввода/вывода.
Для хранения оперативных данных программист, кроме РОН, может использовать внутреннюю и внешнюю (если они имеются) блоки SRAM (см. рис. 2.3).
Работа с внешней SRAM может быть программно разрешена/запрещена установкой/сбросом бита SRE в регистре ввода/вывода MCUSR.
Операции обмена с внутренней оперативной памятью AVR-микроконтроллер выполняет за два машинных цикла. Доступ к внешней SRAM требует одного дополнительного цикла на каждый байт по сравнению с внутренней памятью. Кроме того, установкой бита SRW в регистре ввода/вывода MCUSR можно программно увеличить время обмена с внешней SRAM еще на один дополнительный машинный цикл ожидания.
Выполнять арифметико-логические операции и операции сдвига непосредственно над содержимым ячеек памяти нельзя. Нельзя также записать константу или очистить содержимое ячейки памяти. Система команд AVR позволяет лишь выполнять операции обмена данными между ячейками SRAM и оперативными регистрами. Достоинством системы команд можно считать разнообразные режимы адресации ячеек памяти. Кроме прямой адресации имеются следующие режимы: косвенная, косвенная с пост-инкрементом, косвенная с пре-декрементом и косвенная со смещением.
Поскольку внутренняя и внешняя SRAM входят в единое адресное пространство (вместе с оперативными регистрами и регистрами ввода/вывода), то для доступа к ячейкам внутренней и внешней памяти используются одни и те же команды.
Следует отметить, что регистры ввода/вывода не полностью используют отведенные для них 64 адреса. Неиспользуемые адреса зарезервированы для будущих применений, дополнительных ячеек памяти по этим адресам не существует.
Программный счетчик и стекВ ячейках оперативной памяти организуется системный стек, который используется автоматически для хранения адресов возврата при выполнении подпрограмм, а также может использоваться программистом для временного хранения содержимого оперативных регистров (команды PUSH и POP). В начале любой программы необходимо инициализировать стек программными средствами, т.е. занести в Указатель Стека (Stack Pointer) начальное значение, равное самому старшему адресу ячейки в оперативной памяти. Микроконтроллеры, не имеющие SRAM, содержат трехуровневый аппаратный стек.
Следует иметь в виду, что если стек располагается во внешней SRAM, то вызовы подпрограмм и возвраты из них требуют двух дополнительных циклов, если бит SRW не установлен, и четырех, если установлен.
Размер стека, организуемого в оперативной памяти, ограничен лишь размерами этой памяти. Если микроконтроллер содержит на кристалле 128 байт внутренней SRAM и не имеет возможности подключения внешней SRAM, то в качестве указателя вершины стека используется регистр ввода/вывода SPL. Если есть возможность подключения внешней памяти или внутренняя память имеет размеры 256 байт и больше, то указатель стека состоит из двух регистров ввода/вывода SPL и SPH.
При занесении числа в стек автоматически выполняются следующие действия:
Число записывается в ячейку памяти по адресу, хранящемуся в указателе стека. (SPH:SPL) число.
Таким образом, стек растет от старших адресов к младшим, поэтому, учитывая, что начальное значение указателя стека после сброса равно нулю, программист AVR обязательно должен в инициализирующей части программы позаботиться об установке указателя стека, если он предполагает использовать хотя бы одну подпрограмму.
Кроме оперативной памяти программно доступными ресурсами микроконтроллера являются энергонезависимые, электрически программируемые FLASH и EEPROM блоки памяти, которые имеют отдельные адресные пространства.
Младшие адреса памяти программ имеют специальное назначение. Адрес $0000 является адресом, с которого начинает выполняться программа после сброса процессора. Начиная со следующего адреса $0001, ячейки памяти программ образуют область векторов прерывания. В этой области для каждого возможного источника прерывания отведен свой адрес, по которому (в случае использования данного прерывания) размещают команду относительного перехода RJMP на подпрограмму обработки прерывания (см. рис. 2.3). Следует помнить, что адреса векторов прерывания одних и тех же аппаратных узлов для разных типов AVR могут иметь разное значение. Поэтому для обеспечения переносимости программного обеспечения удобно, так же как и в случае с регистрами ввода/вывода, использовать символические имена адресов векторов прерывания, которые определены в соответствующем inc-файле.
EEPROM блок электрически стираемой памяти данных AVR предназначен для хранения энергонезависимых данных, которые могут изменяться непосредственно на объекте. Это калибровочные коэффициенты, различные установки, конфигурационные параметры системы и т. п. EEPROM-память данных может быть программным путем как считана, так и записана. Однако специальных команд обращения к EEPROM-памяти нет. Чтение и запись ячеек EEPROM выполняется через регистры ввода/вывода EEAR (регистр адреса), EEDR (регистр данных) и EECR (регистр управления).
Регистр состояния.Регистр состояния – SREG является частью пространства ввода/вывода и расположен по адресу $3F. В нем устанавливаются признаки результата арифметических операций. Отдельные биты регистра имеют следующее назначение (см. рис. 2.5)
| SREG | ||||||||
| Символьное обозначение | I | T | H | S | V | N | Z | C |
| Бит | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
Рис. 2.5. Регистр состояния SREG (Status Register).
Рассмотрим некоторые из признаков:
Бит 0 – С (carry) Флаг переноса. Устанавливается, если во время выполнения операции был перенос из старшего разряда результата;
Бит 1 – Z (zero) Флаг нулевого результата. Устанавливается, если результат операции равен 0;
Бит 2 – N Флаг отрицательного результата. Устанавливается, если MSB (Most Significant Bit - старший бит) результата равен 1 (правильно показывает знак результата, если не было переполнения разрядной сетки знакового числа);
Бит 3 – V Флаг переполнения дополнения до двух. Устанавливается, если во время выполнения операции было переполнение разрядной сетки знакового результата;
Бит 4 – : Бит знака, S = N XOR V. Бит S всегда равен исключающему ИЛИ между флагами N (отрицательный результат) и V (переполнение дополнения до двух). Правильно показывает знак результата и при переполнении разрядной сетки знакового числа;
Бит 5 – H Флаг половинного переноса. устанавливается, если во время выполнения операции был перенос из 3-го разряда результата.
Бит 6 - T: Хранение копируемого бита. Команды копирования битов BLD (Bit LoaD) и BST (Bit STore) используют этот бит как источник и приемник обрабатываемого бита. Бит из регистра регистрового файла может быть скопирован в T командой BST, бит T может быть скопирован в бит регистрового файла командой BLD.
Бит 7 - I: Общее разрешение прерываний. Для разрешения прерываний этот бит должен быть установлен в единицу. Управление отдельными прерываниями производится регистром маски прерываний - GIMSK/TIMSK. Если флаг сброшен (0), независимо от состояния GIMSK/TIMSK, прерывания не разрешены. Бит I очищается аппаратно после входа в прерывание и восстанавливается командой RETI, для разрешения обработки следующих прерываний.
Прерывания.Описать, что происходит внутри процессора во время выполнения прерывания очень просто. Если произошел запрос прерывания, и флаг I в регистре состояния установлен в 1, то адрес следующий команды сохраняется в стеке, а выполнения программы продолжается с адреса, хранящимся в соответствующем векторе прерывания. Когда запрос прерывания получен, и программа перешла по этому вектору (адресу), флаг I сбрасывается в 0, чтобы предотвратить возможность вызова нового прерывания во время обработки текущего прерывания.
Флаг I будет снова установлен в 1 в конце обработчика прерывания, когда выполняется команда возврата RETI. Он также может быть установлен в 1 в процессе обработки (после сохранения контекстовых регистров), чтобы разрешить вложенные прерывания. Средние и старшие модели AVR могут обрабатывать столько вложенных прерываний, на сколько хватит объема стека для хранения содержимого счетчика команд и регистров контекста. Младшие модели имеют ограниченный объем стека (три позиции), который может быстро переполниться при выполнении вложенных прерываний или подпрограмм.
2.2. Аппаратные средства AVR. Системный тактовый генератор.
AVR может использовать три различных источника системной частоты: кварцевый или керамический резонатор, внешний тактовый сигнал или встроенный RC-генератор (имеется не во всех моделях). Обычный диапазон частот для AVR – от 0 до 16 МГц.
Кварцевый или керамический резонатор может быть подключен к AVR (см. рис. 2.6). Если используется одна из этих схем, то не следует подключать какие-либо другие устройства ни к одному из выводов XTAL.
а) б)
Рис.
2.6. Схемы подключения
к AVR керамического
и кварцевого
резонаторов
а) без встроенных
конденсаторов
и б) со встроенными конденсаторами.
Также AVR может синхронизироваться внешним тактовым сигналом, поступающим на вход XTAL1. Последний способ синхронизации – использование встроенного RC-генератора. Такой генератор на данный момент есть только в AT90S1200, он обеспечивает тактовую частоту 1 МГц. Этот режим задается при помощи одного из битов конфигурации (fuse bit) только при параллельном программировании МК.
Таймеры.Источником сигнала переключения таймеров/счетчиков является либо тактовая частота процессора, либо внешний синхросигнал. Тактовая частота процессора может использоваться непосредственно или предварительно делиться. Выбор источника сигнала и коэффициента деления производится с помощью мультиплексора (см. рис. 2.8). Биты CSxn, управляющие мультиплексором, расположены в регистре управления таймера TCCR0. В AT90S8515, который содержит два таймерных блока, имеется два мультиплексора – по одному на каждый блок. В AT90S1200 есть только один таймерный блок и один мультиплексор. Содержимое таймера инкрементируется при поступлении переднего фронта переключающего сигнала. Поэтому синхросигнал со внешнего вывода МК поступает в мультиплексор в прямом и инвертированном. Значение внешнего сигнала проверяется при поступлении переднего фронта тактового сигнала процессора.
На рис. 2.7 показан Таймер 0 – простой 8-разрядный таймер, содержимое которого может быть считано или записано. Отключение входного сигнала происходит путем выбора «заземленного» входа при помощи мультиплексора. При переполнении счетчика реализуется маскируемое прерывание.
Таймер 1 – более сложный 16-разрядный таймер. Он может выдавать на выход импульсы и ШИМ-сигналы. Его большим достоинством является возможность реализации дополнительных функций, таких как таймер событий.
Рис. 2.7. Структура таймера 0.
Сторожевой таймер.Сторожевой таймер представляет собой отдельный таймер с собственной частотой на 1 МГц, который при включении будет отсчитывать нужный интервал времени. Если произойдет переполнение до того, как команда WDR сбросит таймер в 0, то производиться перезапуск МК.
Сторожевой таймер включается при установке в 1 бита WDE в регистре управления сторожевого таймера WDTCR. Содержимое битов WDPn этого регистра определяет интервал времени до того, как сторожевой таймер произведет перезапуск МК.
Устройство внешнего вывода.Схема подключения внешнего вывода, показанная на рис. 2.8, дает представление о его работе. С каждым набором линий («портом») связано три адреса ввода/вывода, которые позволяют определять значения данных, записанных в порт, направление передачи данных (1- вывод, 0 - ввод) и реальное значение сигнала на внешнем выводе. Вследствие этого есть возможность «подтянуть» выводы порта к высокому потенциалу для работы в режиме ввода данных, и использовать состояние некоторых выводов в качестве запросов прерываний.
Чтение данных может быть либо непосредственно с внешнего вывода, либо с выхода регистра данных порта. Такая возможность является важной особенностью работы порта. Если внешняя линия перегружена или случайно закорочена на «землю», то состояние внешнего выхода никогда не будет меняться. Поэтому в некоторых случаях очень важно иметь возможность прочитать содержимое регистра порта и сравнить его с реальным состоянием внешнего вывода.
Рис. 2.8. Схема внешнего вывода.
«Подтягивание» внешнего вывода к высокому потенциалу управляется не отдельными битами регистра, а для этого используется специальная комбинационная схема. Эта схема разрешает «подтягивание» только, когда внешний вывод работает в режиме ввода данных, т.е. когда бит регистра направления данных сброшен в 0, а бит регистра данных порта установлен в 1.
Аналоговый ввод/вывод.Встроенный аналоговый компаратор напряжений дает возможность не только сравнивать входное напряжение с опорным, но и измерять длительность импульса при помощи встроенного таймера.[13] Выход компаратора (см. рис. 2.9.) будет находиться в состоянии 1, если значение напряжения на положительном (не инвертирующем) входе AIN0 больше, чем на отрицательном (инвертирующем) AIN1.
Рис. 2.9. Устройство компаратора напряжения.
Состояние может использоваться для реализации различных вариантов запроса прерывания, которые задаются при помощи битов ACIS1 и ACIS0 (см. таблицу 2.1.) в регистре прерывания и состояния аналогового компаратора ACSR.
Таблица 2.1. Установки битов ACIS1 и ACIS0.
| ACIS1 | ACIS0 | Тип прерывания |
| 0 | 0 | Прерывание по переключению выхода компаратора |
| 0 | 1 | Зарезервировано |
| 1 | 0 | Прерывание по спадающему фронту (из 1 в 0) |
| 1 | 1 | Прерывание по нарастающему фронту (из 0 в 1) |
Определить текущее состояние выхода компаратора можно путем опроса значения бита ACO в ACSR. Для уменьшения мощности потребления можно отключить компаратор, установив в 1 бит ACD в регистре ACSR. Перед тем, как включить или выключить компаратор, надо запретить все его прерывания путем сброса в 0 бита ACIE в регистре ACSR, чтобы предотвратить возможность поступления ложных запросов прерывания от компаратора.
В МК AT90S8515 к выходу компаратора можно подключить вход захвата таймера. При этом можно зафиксировать момент изменения сигнала на выходе компаратора, если в регистре ACSR бит ACIC установлен в 1. Такая возможность позволяет измерять длительность сигнала, поступающего на компаратор.
Конфигурирование МКВ AVR есть два типа битов, задающих конфигурацию МК. Биты конфигурирования «fuses bits» (плавкие перемычки) используются для выбора режима работы AVR, тогда как биты защиты «lock bits» используются для запрещения доступа к памяти.
. Биты конфигурирования различны для разных типов AVR. В AT90S1200 установка в 1 бита RCEN подключает встроенный RC-генератор, при этом внешние тактовые импульсы игнорируются. Когда бит SPIEN сброшен в 0, разрешается программирование МК по последовательному интерфейсу через порт SPI. Во всех этих моделях биты SPIEN и RCEN по умолчанию сброшены в 0.
МК AT90S8515 имеет биты SPIEN и FSTRT, которые позволяют при использовании внешнего тактового генератора производить быстрое включение МК без обычной задержки в 16мс.
Биты конфигурирования «fuses bits» могут быть установлены или сброшены только при параллельном программировании.
Биты защиты «lock bits» используются для запрещения/разрешения доступа к памяти программ в EEPROM, при этом достигаются свойства приведенные в таблице 2.2.
Таблица 2.2. Режимы защиты и биты блокировки
| Биты блокировки | Тип защиты | ||
| Режим | LB1 | LB2 | |
| 1 | 1 | 1 | Защита не установлена |
| 2 | 0 | 1 | Дальнейшее программирование флэш-памяти запрещено |
| 3 | 0 | 0 | Как режим 2, но запрещено и чтение |
Примечание: биты блокировки стираются только при полном стирании памяти
Память данных EEPROM.
Операции чтения и записи области данных EEPROM довольно просты и надежны. Обращение к EEPROM производится при помощи команд с индексной адресацией, которые используют адрес, хранящийся в регистре EEAR.
Если EEPROM имеет емкость больше 256 байт, как у AT90S8515, то используются два адресных регистра: EEARH для хранения старшей части адреса и EEARL – для хранения младшей части. Эти регистры должны сохранять правильный адрес до тех пор, пока не буде закончена операция чтения или записи.
Запись в память данных EEPROM производится следующим образом:
Ожидание сброса в 0 бита EEWE в регистре управления EECR памяти EEPROM;
Запись в EEAR нужного адреса;
Запись в регистр данных EEDR нужных данных;
Установка в 1 бита EEMWE в регистре EECR. (Бит EEMWE не используется в AT90S1200);
В течении четырех тактов после установки бита EEMWE установить бит EEWE в 1 для начала записи в EEPROM. Операция записи занимает от 2,5 до 4мс.
Бит EEMWE регистра EECR обеспечивает аппаратную блокировку записи для того, чтобы уменьшить возможность случайного изменения EEPROM.
Чтение из EEPROM выполняется аналогичным образом.
Ожидание сброса в 0 бита EEWE в регистре управления EECR;
Запись в EEAR нужного адреса;
Установка в 1 бита EERE в регистре EECR;
Чтение данных из EEDR.
Операция записи должна быть закончена до того, как программа произведет попытку чтения из EEPROM. После установки в 1 бита EERE процессор переходит в состояние ожидания в течении двух тактов, пока данные выбираются из EEPROM. Это означает, что выполнение команды «SBI EECR, EERE», которая инициализирует операцию чтения, занимает не один такт, а три.
Подключение питания и запуск.Подключение питания к AVR осуществляется очень просто. Для этого требуется напряжение +5В, шина «земля» развязывающий конденсатор. Все модели имеют широкий диапазон напряжений питания 2,7 В – 6,0 В, что позволяет легко реализовать батарейное питание, используя от 2 до 4 обычных батареек или никель-кадмиевых элемента.
Что касается потребления энергии, то МК потребляют несколько мА в рабочем режиме и несколько сотен мкА в режим ожидания (sleep mode).
Вывод RESET имеет внутреннее соединение с шиной питания через резистор («потягивания» к питанию), что избавляет от необходимости использования внешнего соединения. В процессе отладки системы, когда надо постоянно перезапускать МК и наблюдать за его поведением, все, что вам для этого нужно – это простая кнопка, которая будет замыкать вывод RESET на землю (см. рис. 2.10). В законченной системе вы можете оставлять вывод RESET не подключенным.
Рис. 2.10. Запуск AVR при помощи внешнего выключателя.
Если во время выполнения программы на вход RESET поступит сигнал низкого уровня длительность более двух тактов, то выполнение программы сбрасывается в начальное состояние, а тактовый генератор продолжает работать. Когда на этом выводе снова установиться высокий уровень, выполнения программы начнется с нулевого адреса.
Программирование в системе.Используя программирование по последовательному интерфейсу, можно менять программу в памяти МК, уже установленного в готовую к применению систему. Для этого плата с контроллером должна быть подключена к питанию и генератору тактовых сигналов (см. рис. 2.11).
Рис. 2.11. Схеме подключения МК для программирования в системе.
На рис. 2.11 включены согласующие резисторы в линиях программирования, чтобы быть уверенным, что если схема программирования подает на эти линии сигналы, уровень которых отличается от того, который поступает на них от других устройств системы, состояния выводов не изменяться и на них не возникнет конфликт сигналов.
Для линии запуска используется другое подключение. Нормально на этой линии поддерживается высокий уровень сигнала, а программатор может подать на нее низкий, чтобы перевести МК в режим программирования по последовательному интерфейсу. Управление состоянием линии RESET осуществляется схемой, имеющий выход с открытым коллектором.
Эту схему можно использовать для программирования прикладной системы. Надо соединить МК (сигналы «земля», RESET, MISO, MOSI и SCK) с программатором при помощи 5-и контактного IDC-разъема.
2.3. Система команд микроконтроллера AVR
Микроконтроллеры AVR имеют очень широкий набор команд. Это позволяет более просто произвести разработку компиляторов, что также означает, что AVR может быть легко запрограммирован с использованием разнообразных команд, упрощающих решение задачи.
Следует обратить внимание на следующие тонкости. Многие команды могут обращаться только к 16-старшим РОН и не имеют доступа к 16-младшим. Значения смещений и констант могут быть ограничены и оказаться не в том диапазоне, который вы ожидали.
Существует различие между «полноценными» старшими моделями серии 8515 и младшими моделями серии 1200. Младшие модели МК реализуют часть полного набора команд, в которых доступен только один индексный регистр Z. Хотя при переносе программ с младших моделей на старшие вряд ли возникнут проблемы, они весьма вероятны при обратном направлении переноса. Даже с учетом всех этих предостережений AVR – это МК очень простой для программирования благодаря богатству набора команд и особенностям его структуры.
Для наглядности, в данном разделе приведем только некоторые примеры команд. Но прежде чем приступить к изучению команд, целесообразно рассмотреть различные способы адресации данных.
Способы адресации данныхПрямая адресация к Регистрам Общего Назначения
Основным способом доступа к данным является прямое (непосредственное) обращение к РОН. На рис. 2.12 операнд команды содержится в регистре Rd, а КОП обозначает часть слова команды, соответствующую Коду ОПерации, Обычно в формате команды отводиться пять бит, которые позволяют адресоваться к любому регистру.
Команды, оперирующие с двумя регистрами, действуют, в основном, аналогичным образом. В этих командах регистр-приемник Rd (destination) указывается перед регистром-источником Rr (resource), то есть является первым параметром (см. рис. 2.13). Таким образом, команда:
ADD R0, R1
реально выполняется так: R0 = R0 + R1.
Рис. 2.12. Прямая адресация одного регистра.
Результат сохраняется в регистре Rd.
Рис. 2.13. Прямая адресация к двум РОН.
Прямая адресация к регистрам ввода/вывода.
На рис.
2.14 адрес операнда
содержится
в 6 битах слова
команды (ячейка
Р).
Rd – определяет
адрес регистра
источника или
регистра приемника.
К примеру, этот
тип адресации
могут использовать
команды IN
или OUT:
IN R0, SREG ;сохранить регистр состояния в регистре R0
OUT PORTB, R1 ;записать данные из регистра R1 в PORTB
Рис. 2.14. Прямая адресация регистров ввода/вывода.
Прямая адресация данных.
Рис.2.15. Прямая адресация данных.
Единое адресное пространство является пространством данных, включая РОН, регистры ввода/вывода, внутренняя память и внешняя память (если есть). 16-разрядный адрес данных содержится в 16 младших разрядах 32-х разрядной команды. Rd/Rr определяет адрес регистра источника или регистра приемника. Такой тип адресации, к примеру, могут использовать команды LDS и STS:
LDS PORTB, R1 ;записать данные из регистра R1 в PORTB
STS PORTB, R1 ;записать данные из регистра R1 в PORTB
Косвенная адресация данных
Существует четыре типа косвенной адресации данных: простая, с постинкрементом, с преддекрементом, со смещением. Для первых трех типов косвенной адресации данных адрес операнда содержится в регистре X, Y или Z. Для последнего типа (со смещением) адрес операнда вычисляется сложением содержимого регистров Y или Z с шестью битами адреса, содержащимися в слове команды. Сами же регистры остаются неизмененными.
Смысл косвенной адресации с постинкрементом (с преддекрементом) заключается в следующем. После (до) выполнения операции регистр X, Y и Z инкрементируется (декрементируется).
Рассмотрим некоторые примеры:
1) ST X, Rn ;поместить данные из Rn в по адресу указанному в регистре Х;
2) ST X+, Rn ;тоже что и в 1), но впоследствии X инкрементируется;
3) ST -X, Rn ;предварительно X декрементируется;
В предыдущих трех примерах вместо Х могут быть Y или Z.
4) STD Y+c, Rn ; к значению Y прибавляется константа смещения ’c’ и по этому адресу записываются данные из Rn. Y при это остается неизменен. Вместо Y может быть только Z.
Команды пересылки данных.Пересылка данных из одного места в другое является для AVR очень простой операцией, так как имеется очень большое количество команд, предназначенных для выполнения этой задачи. Ни одна команда пересылки данных не оказывает влияния на биты регистра состояния.
Команда LPM – загрузка данных из таблиц, хранящихся в памяти программ. В этой команде младший бит индексного регистра Z используется для указания байта, который будет читаться, если 0 – читается младший байт, 1 – старший. Оставшиеся 14 байт используются для указания адреса слова.
Команда MOV – копирует содержимое одного РОН в другой. LDI – загружает в один из 16 старших РОН байт, содержащийся в команде. IN и OUT – доступ к регистрам ввода/вывода, начиная с нулевого адреса. Полный список всех команд пересылки данных можно найти в ПРИЛОЖЕНИИ 1, Таблица А.3.
На рис.2.16 наглядно показано схематическое выполнение команды LPM.
Рис. 2.16. Команда LPM.
Команды арифметических и логических операций.Основными арифметическими операциями являются сложение и вычитание двух чисел. Эти команды по большей части очевидны. Сложение и вычитание содержимого двух регистров производиться при помощи команд ADD и SUB. Модификации этих команд, которые учитывают значение флага переноса, позволяют выполнить операции над 8-, 16-, 24- и даже 32-разрядными числами со знаком, хранящимися в регистрах.
Поясним функции флагов отрицательного результата N (negative), переполнения V (overflow) и знака S (sign), так как они имеют некоторые особенности и сложны для понимания при первоначальном знакомстве.
Флаг отрицательного результата N просто копирует значение бита 7 результата, который показывает, является результат положительным или отрицательным числом.
Флаг переполнения V в регистре SREG указывает на переполнение во время сложения или вычитания чисел со знаком. Рассмотрим пример:
ADD R1, R2
Флаг V будет установлен в 1, если в регистрах R1 и R2 содержаться положительные числа, а результат их сложения окажется больше 127, или оба числа отрицательны, а результат будет меньше –128. Рассмотрим пример с конкретными значениями:
LDI R1, 100 ;100 = 0b01100100
LDI R2, 100 ;Занести 0b01100100 R1 и R2
ADD R1, R2 ;R1 = R1 + R2 = 200 = 0b11001000
Десятичное число 200 в двоичной записи имеет значение бита 7 равное 1, что указывает на получение отрицательного результата. Следовательно, после выполнения операции сложения флаг N будет установлен в 1. Но в данном случае вместе с флагом N будет так же установлен в 1 флаг V, указывая, что произошло переполнение при обработке чисел со знаком.
Если содержимое R1 = R2 = - 100, то результатом сложения этих чисел будет 0b00111000 в двоичной системе счисления, что является положительным числом. При этом флаг N будет сброшен в 0,показывая, что результата положителен, однако будет установлен флаг V, означающий, что на самом деле это не так.
Использование флага S = N ^ V позволяет рассматривать результат как 9-разрядное число со знаком, где старшим (знаковым) разрядом как раз и является флаг S. Как было отмечено при описании флага V, он устанавливается в 1, когда бит 7 результата имеет неправильное значение, то есть результат не представлен правильным числом со знаком в дополнительном коде. Выполнив операцию «ИСКЛЮЧИТЕЛЬНОЕ ИЛИ» над значением флага V и бита 7 результата, который храниться в бите N, вы получите реальный знак результата. В первом примере (100 + 100) происходит установка в 1 флагов V и N, в результате флаг S будет равняться нулю (1 ^ 1 = 0). Во втором примере (- 100 - 100) флаг N сбрасывается в 0, а флаг V устанавливается в 1, поэтому флаг S будет равняться единице, указывая на то, что результат отрицательный.
Флаг S должен использоваться со старшим байтом числа. При операциях с 16-, 24- и 32-разрядными числами значение флага S надо проверять только после завершения последней операции со старшим байтом числа. При операциях с младшими байтами используется флаг переноса С, как обычно при выполнении сложения и вычитания.
Команды ветвленияКоманды относительного перехода RJMP и вызова подпрограммы RCALL являются основными для изменения выполнения последовательности команд в МК. При этом содержимое программного счетчика изменяется на величину смещения, которое задается в 12 младших битах кода команды.
МК может выполнять команды ветвления по значению определенных битов в регистре состояния SREG. Поскольку номер бита и его значение должны быть указанны в коде команды, то диапазон возможных адресов перехода составляет +/- 63 относительно текущего адреса. Это означает, что применение команд условных ветвлений весьма ограничено, но эту проблему можно решить при помощи ветвления к команде, которая затем выполнит необходимый безусловный переход.
Еще один класс команд ветвления – это команды пропуска. После проверки указанного условия, данные команды либо выполняют следующую команду, либо пропускают ее.
Битовые команды и команды тестирования битов.Команды сброса (очистки) и установки битов предназначены для модификации регистров ввода/вывода. Но некоторые из них могут работать только с частью регистров ввода/вывода. Это значит, что для некоторой части регистров ввода/вывода вы должны сначала переписать их содержимое в РОН, модифицировать, а затем снова сохранить в регистре ввода/вывода. Для выполнения этой процедуры можно написать специальную макрокоманду (макрос).
Часто необходимо переслать бит из одного регистра или переменной в другой. Это можно сделать следующим образом:
BST B,5 ;поместить бит 5 переменно В в бит Т регистра SREG
BLD A,2 ;сохранить бит Т регистра SREG в качестве бита А.2
Команда SWAP меняет местами старший и младший полубайт регистра. Это полезно когда вы храните в регистре две цифры, а не одно восьмибитовое число.
Команды сдвигов и циклических сдвигов LSL, LSR, ROL, ROR и ASR полезны как для выполнения сдвигов данных в процессе их ввода вывода, так и для проверки значения определенного бита в РОН без необходимости выполнения 8 отдельных операций тестирования битов. С помощью циклического сдвига можно произвести индивидуальную проверку любого бита в заданном месте байта.
3. ПРОГРАММНОЕ И ИНСТРУМЕНТАЛЬНОЕ ОБЕСПЕЧЕНИЕ ПРОЦЕССА ПРОГРАММИРОВАНИЯ МИКРОКОНТРОЛЛЕРОВ
3.1. Написание и отладка программного кода с помощью AVR Studio
Известные интегрированные среды разработки программ, повышающие производительность труда программиста, позволяет избежать рутинной работы. Интегрированные пакеты для разработки программ, выпускаемые разными производителями, схожи между собой по функциям, по различным сервисным возможностям, удобству работы и качеству генерируемого машинного кода.
Например пакет программ AVR Studio Version 3.53 (см. рис. 3.1.) является интегрированной средой разработки (ИСР) для МК серии AVR.[16] Этот программный продукт включает в себя:
встроенный редактор текста, для набора исходного кода программы,
транслятор с языка ассемблер,
программный симулятор ЦПУ, памяти и устройств ввода/вывода
поддержку внешних устройств, таких как – внутрисхемный эмулятор (ВСЭ) ICEPRO, ICE200 и программатора типа AVRISP и STK500/501.
Рис. 3.1. Главное окно AVR Studio.
Компания Atmel распространяет данный продукт совершенно бесплатно, что является огромным преимуществом в начале освоения программирования МК и изучении его архитектуры.
Как и в реальной ИСР, здесь вы можете легко писать исходный текст программы на ассемблере, подключить внешний компилятор для С, отлаживать текст написанной программы используя встроенный программный симулятор или подключить ВСЭ. И в конечном итоге вы можете запрограммировать свой МК программатором AVRISP или STK500/501.
3.1.1. Обзор AVR StudioДля установки AVR Studio требует Microsoft Windows 9x/NT/2000
Как уже говорилось, AVR Studio позволяет отслеживать код программы с помощью внутрисхемного эмулятора или программного симулятора. Для выполнения (отслеживания) кода программы она сначала должна быть откомпилирована, чтобы сгенерировать объектный файла, который загружается в AVR Studio.
Рис. 3.2. AVR Studio в процессе отладки исходного кода программы Ap1.asm.
Ключевое окно в AVR Studio является окно источника (Source window), где отображается исходный код программы (см. рис. 3.2). Когда открывается объектный файл, то автоматически создается окно источника. Оно показывает выполняемый программный код и имеет название, соответствующее имени открытого файла. Указатель программного счетчика (желтая стрелка ) всегда показывает на строчку, которая будет выполняться. Полоса статуса (Status bar) указывает является ли исполнительное устройство ВСЭ или программным симулятором. Окно источника дает информацию о логике программы. В дополнении к этому, AVR Studio может показывать другие окна, которые предоставляют пользователю достаточный контроль состояния каждого элемента исполнительного устройства (ВСЭ или симулятор). Перечислим некоторые доступные окна:
Смотровое окно (Watch window) – показывает значения и адреса определенных переменных.
Окно РОН (Register window) – показывает состояние РОН. Регистры могут быть изменены при остановке выполнения программы.
Окно памяти (Memory window) – показывает содержимое памяти программ, памяти данных, регистров ввода/вывода и содержимое энергонезависимой памяти EEPROM. Ячейки памяти могут быть отражены в различных форматах: шестнадцатеричном, десятичном или двоичном формате или как ASCII символы. Содержимое памяти, также как и регистры, может быть изменено по желанию при остановке программы.
Окно регистров ввода/вывода (I/O window). Показывает содержимое регистра состояния, таймеров, EEPROM регистров, портов ввода/вывода и т.д.
Окно процессора (Processor window). Показывает важную информацию о выполнении программы включая Счетчик Команд (Program Counter), Указатель Стека (Stack Pointer),флаги регистра состояния (Flags), Счетчик Циклов (Cycle Counter) и др.
3.1.2. Создание нового проектаЗапустив AVR Studio в меню Project выберите пункт New. Как показано на рис. 3.3, в появившемся диалоговом окне «Select project name» необходимо будет ввести имя проекта (см. «Project name»), его местоположение «Location» и тип проекта «Project type». Имя может быть любым стандартным именем файла. Каталог можно написать в соответствующем текстовом поле или выбрать из списка имеющихся папок, при нажатии кнопки справа с тремя точками. Если каталога не существует, то он будет создан без всяких напоминаний.
Рис. 3.3. Создание нового проекта.
Все файлы вашего проекта AVR Studio сохраняет в выбранном каталоге.
Тип проекта выбирают из следующих соображений:
AVR Assembler: для компиляции кода текста проекта используется встроенный транслятор. Не требует ни каких дополнительных настроек. Мы будем использовать именно этот тип.
Generic 3rd party C compiler: позволяет вручную настраивать AVR Studio для использования внешних компиляторов.
После введения всех вышеперечисленных данных для продолжения нажмите кнопку ‘OK’. Далее появится окно проекта, как показано на рис 3.4.
Рис. 3.4. Окно нового проекта.
В папках «Assembler Files» и «Other Files» хранятся файлы связанные с вашим проектом. Но на рис. 3.4 они пока пустые.
Добавление ассемблерного файла в проект может быть реализовано несколькими способами. Можно добавить существующий файл или создать новый. Далее мы используем и тот, и другой способ.
Создадим новый файл исходного кода программы. Для этого с помощью нажатия правой кнопки мыши на папке «Assembler Files» вызовем контекстное меню, как показано на рис. 43 и выберем пункт «Add File…». Появиться окно под названием «Add Files to Project». Убедитесь, что вы находитесь в каталоге своего проекта. В этом каталоге как минимум должен быть файл вашего проекта. В нашем случае это – "Demo_Project.apr". в текстовом поле «File name:» введем имя нового файла – "LED_code.asm", и нажмем кнопку «Open». Заметим, что расширение файла – asm следует ввести вручную, т.к. автоматически оно не создастся. Если все сделано правильно, то создастся файл с тем именем, который вы ввели.
Создание файла можно было осуществить с помощью контекстного подменю «Create New File». Тогда появиться примерно такое же окно как на рис 3.3, но под названием «Create new file». В это случае AVR Studio создает файл не в указанной папке (Assembler или др.), а в корневой папке проекта (Target), что бывает не всегда полезным.
В только что созданный файл добавьте следующий код программы:
;******************************************************
.include "8515def.inc"
.def temp = r16
rjmp
RESET
; вектор прерывания
по включению
питания,
;сбросу RESET
или от сторожевого
таймера
RESET:
ldi temp,low(RAMEND) ;инициализируем указатель стека
out SPL,temp ;
ldi temp,high(RAMEND);
out SPH,temp ;
ser temp ;temp = 0xFF
out DDRB,temp ;конфигурируем порт В как выход
loop:
out PORTB,temp ;выводим temp в порт В
inc temp ;инкремент temp
rjmp loop ;переход на метку loop
;******************************************************
Теперь добавим в проект уже существующий файл. Для этого, во-первых, скопируем файл "8515def.inc" в каталог нашего проекта (см. рис. 3.3.), т.е. в D:\Project_files\AVRasm\ из подкаталога Appnotes, где находится AVR Studio. Вернувшись в окно проекта проделаем знакомую уже нам операцию по добавлению файла. На папке «Assembler Files» в контекстном меню выберем пункт «Add File…». В появившемся диалоговом окне добавления файлов к проекту выберем каталог нашего проекта, а из перечисленных файлов – "8515def.inc" и нажмем «Open». Теперь окно проекта должно соответствовать рис. 3.5.
Рис. 3.5. Окно проекта с рабочими файлами.
Посмотрев внимательно на рис. 3.5 можно заметить отличие иконок файлов "8515def.inc" и "LED_code.asm". Дело в том, что когда мы добавляем первый файл в новый проект, то AVR Studio помечает его как входной транслируемый файл – «Assembler entry file». И при вызове встроенного транслятора (ассемблера) будет компилироваться именно этот файл, помеченный красной стрелкой вправо, а все остальные, помеченные синей стрелкой вниз – будут игнорироваться. Вообще-то говоря файл "8515def.inc" добавлять в окно проекта совершенно не обязательно. Это было сделано с целью обучения. Важно чтобы этот файл был в том же каталоге, что и ассемблерный файл.
Рис. 3.6. Меню «Project».
Теперь самое время транслировать исходный код программы в объектный код. Для этого существует несколько способов. Можно вызвать контекстное меню и кликнуть мышью на «Assemble», как показано на рис. 3.5, или сделать тоже самое через меню «Project» (см. рис. 3.6). А можно просто нажать «F7».
Появится окно «Project Output» с сообщением об успешной трансляции или ошибках, если они имеются. Если вы еще не сохранили проект, то желательно это сделать, выбрав через меню «Project» команду «Save» или на панели инструментов нажать кнопку «Save all». Если трансляция прошла без ошибок, то можно смело приступать к исполнению кода на встроенном симуляторе или ВСЭ, если он имеется в наличии.
Заметим, что для создания hex файла, который необходим при прошивки (программирование) кристалла, необходимо изменить установки проекта (Project Settings…) см. рис. 3.5. и рис. 3.6. Для этого в появившемся окне “AVR Assembler Options” установите “Output file format:” на “Intel Intellec 8/MDS (Intel Hex)”. Теперь каждый раз при вызове транслятора будет создаваться выходной файл с расширением hex и файл с расширением eep, если в коде программы есть сегмент EEPROM данных.
3.1.3. Исполнение программного кодаДля отладки программы или другими словами, для выполнения программного кода в режиме симулятора необходимо, конечно же, чтобы программа транслировалась без ошибок.
Рис. 3.7. Меню «Debug».
После успешной трансляции выберете из меню «Debug» команду «Trace into» или нажмите «F11», как показано на рис. 3.7. Так как у нас нет ВСЭ, то AVR Studio сама предложит определить соответствующий режим программного симулятора (см. рис. 3.8). Появится окно «Simulator Options», в котором необходимо будет выбрать тип устройства для симуляции. В данном примере это AT90S8515. Изменять значения частоты и объема памяти нежелательно, так как они установлены для выбранного устройства по умолчанию согласно техническим параметрам МК. После нажатия кнопки «ОК», можно сказать, что все готово для работы с кодом программы на симуляторе в пошаговом режиме или другом, каком вы пожелаете.
Рис. 3.8. Окно опций программного симулятора.
Заметим, что теперь в окне исходного кода программы, слева на серой полосе появилась желтая стрелка вправо, которая является указателем программного счетчика. Она указывает на следующую инструкцию, которая будет выполняться. Пример такой стрелки можно увидеть на рис. 3.8.
Рис. 3.9. Меню «View».
Окно регистров ввода/вывода.
Для более наглядного представления, что происходит с регистрами ввода/вывода во время выполнения программы, откроем соответствующее окно – «IO view». Это можно сделать либо через меню «View» команда «New IO View», либо нажав «Alt» и 5, как показано на рис. 3.9, или на панели инструментов нажать соответствующую кнопку – .
Рис. 3.10. Окно регистров ввода/вывода для МК AT90S8515.
Так как мы определили для встроенного симулятора микроконтроллер типа AT90S8515, то окно регистров ввода/вывода откроется автоматически со всеми надлежащими устройствами для этого типа МК (см. рис. 3.10). Данное окно содержит перечень устройств, содержимое которых можно просмотреть, как «древовидную» структуру, где один элемент может содержать ряд вложенных подэлементов.
Рис. 3.11. Содержимое порта В.
Так как наша программа работает с портом В, то рассмотрим его содержимое более подробно. Для этого по названию «Port B» щелкнем мышью два раза (double click) или один раз по плюсику слева. Список порта В раскроется, как показано на рис. 3.11, и можно будет увидеть регистр данных (PORTB), регистр направления данных (DDRB) и выводы порта В (PINB) – «Port B Data», «Data Direction» и «Input Pins», соответственно.
Каждый бит этого регистра представлен в виде флажка. Логическая единица соответствует установленному флажку, а логический ноль – снятому. Состояния этих флажков обновляются во время выполнения программы и показывают текущее значение каждого бита. Вы также можете устанавливать или очищать значения битов, щелкая мышью по соответствующим флажкам, тем самым изменяя значения соответствующих регистров ввода/вывода.
Существует пара команд для одиночного пошагового выполнения программы. Это «Trace into» /F11/ и «Step Over» /F10/ из меню «Debug» (см. рис. 3.7). Отличие состоит в том, что «Trace into» при вызове подпрограммы входит в неё в пошаговом режиме, т.е. можно отследить каждую команду по отдельности; а «Step Over» выполняет подпрограмму целиком и продолжает выполнение в пошаговом режиме со следующей команды после вызова подпрограммы, т.е. как бы «обходит» подпрограмму. Наш пример не содержит подпрограмм, поэтому различие заметно не будет.
Дойдя до последней строчки программы, следует обратить внимание на изменение цвета регистров порта В. Те регистры, которые в последнем шаге трассировки поменяли свое значение, становятся красными, остальные – черные. Это облегчает наблюдать за теми регистрами ввода/вывода, которые меняют свое значение при трассировке. Продолжая трассировку (нажимая /F11/ ) можно наблюдать как регистры порта В меняют свое значение – инкрементируются.
Рис. 3.12. Добавление точки останова.
Добавляя точки останова, мы можем выполнять программу с максимальной скоростью, останавливаясь лишь там, где установлены точки останова.
Установив, курсор на нужном месте и нажав , или вызвав контекстное меню и нажав команду «Toggle Breakpoint» можно легغо установить точку останова (см. рис. 3.12). Повторное нажатие приведет к её снятию. Красный квадратик на полоске слева как раз и обозначает точку останова. В данном примере точка останова установлена для демонстрации увеличения скорости выполнения программы. Когда не было точки останова нам требовалось трижды нажимать чтобы совершить один цикл (loop:). Установив же точку останова на команде “rjmp loop” и запустим программу на выполнение через меню «Debug» команда «Go» или нажмем (см. рис. 3.7), остановка произойдет лишь в точке останова и таким образом для одного цикла потребуется всего лишь одно нажатие . Это реальный пример ускорения отладки программы.
Предположим нам надо чтобы регистр порта В не инкрементировался, а декрементировался во время выполнения программы. Для этого немного изменим код программы. В окне исходного кода программы строчку "inc temp" изменим на "dec temp" (см. рис. 3.13). Если теперь продолжить выполнение программы (нажать или или ), то AVR Studio выдаст диалоговое окно, которое информирует об изменение исходного файла и спрашивает, нужно ли перекомпилировать проект. Следует нажать «Yes».
Рис. 3.13. Изменение исходного кода программы и перекомпиляция проекта.
После перекомпиляции указатель счетчика команд будет установлен в начало на первую команду. Заметим, что установленные точки останова остаются без изменения.
«Смотровое» окно.
Для наблюдения за переменными, а точнее за их значениями удобно использовать «Смотровое» окно (Watch window). Открыть его можно использовав комбинацию клавиш «Alt» + «1» или вызвав меню «View» команду «Watch» (см. рис. 3.9) или нажав кнопку на панели инструментов – .
Переменные, которые определены с помощью макроса “.DEF” могут быть помещены в «Смотровое» окно несколькими способами. Выделив нужную переменную ее можно просто перетащить в «Смотровое» окно или в меню «Watch» нажать команду «Add Watch» или на панели инструментов нажать кнопку – .
В данной программе только переменная “temp” является таковой. Ее мы и можем увидеть на рис. 3.14.
Рис. 3.14. Смотровое окно.
Во время пошагового выполнения программы можно наблюдать, как меняется наша переменная “temp”. Заметим, что данное окно также позволяет пользователю изменять значения переменных, т.е. непосредственно влиять на ход выполнения программы, облегчая отладку.
Рис. 3.15. Окно процессора.
Окно процессора.
Теперь понаблюдаем за окном процессора. Откроем его, нажав «Alt» + «3» (см. рис. 3.9) или щелкнув по иконки – . Это окно (см. рис. 3.15.) предоставляет определенную информацию о выполнении программы включая Счетчик Команд (Program Counter), Указатель Стека (Stack Pointer),флаги регистра состояния (Flags), Счетчик Циклов (Cycle Counter) и др.
Очень полезными для оценки длинны циклов или времени выполнения подпрограммы могут оказаться «Cycle Counter» и «StopWatch». Хоть в данном примере мы практически не используем это окно, оно все же играет очень важную роль в отладки программы.
Перед закрытием проекта необходимо его сохранить. AVR Studio запомнит расположение окон и использует эти установки при следующем запуске проекта.
3.2. Анализ методики реализации разработки программного обеспечения 3.2.1. Классификация вариантов заданий
Цель заданий – практическое освоение методики программирования на ассемблере микроконтроллеров ATMEL семейства AVR, отладка программы на симуляторе AVR Studio и программирование кристалла с помощью программатора расположенного в системе макета. Примеры заданий могут использоваться не только как для проверки знаний и навыков по программированию, но и для наглядного объяснения архитектуры при чтении теоретического материала.
После изучения теоретического материала, а именно: архитектуры МК, аппаратных и программных средств, основных типов интерфейсов, системы команд и симулятора МК, можно приступить к практической реализации различных задач на основе МК.
Именно написание программ и умение их объяснить является критерием понимания архитектуры МК, а также критерием способности использовать данную архитектуру в сочетании с программированием (ассемблером).
Конкретных примеров заданий может быть очень много. Мы разделим эти примеры на несколько общих классов. Сначала перечислим достаточно простые классы задач.
1. Работа с памятью.
К этому классу задач можно отнести любые операции с различными областями памяти, такие как чтение или запись. К примеру, можно считывать или записывать данные из/в EEPROM, SRAM или даже памяти программ (Program Memory). Меняя начальный адрес и размер данных, а также тип (область) памяти можно создавать различные примеры задач.
Похожие работы
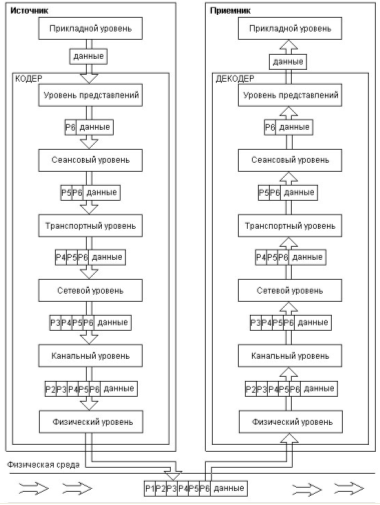
... с применением полиграфических компьютерных технологий? 10. Охарактеризуйте преступные деяния, предусмотренные главой 28 УК РФ «Преступления в сфере компьютерной информации». РАЗДЕЛ 2. БОРЬБА С ПРЕСТУПЛЕНИЯМИ В СФЕРЕ КОМПЬЮТЕРНОЙ ИНФОРМАЦИИ ГЛАВА 5. КОНТРОЛЬ НАД ПРЕСТУПНОСТЬЮВ СФЕРЕ ВЫСОКИХ ТЕХНОЛОГИЙ 5.1 Контроль над компьютерной преступностью в России Меры контроля над ...
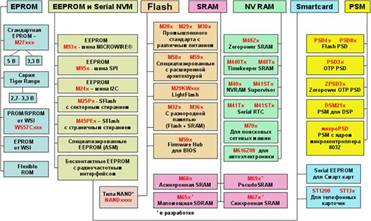
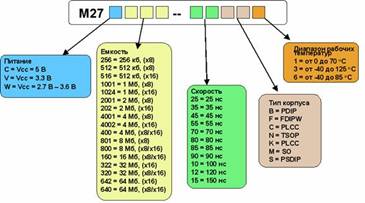
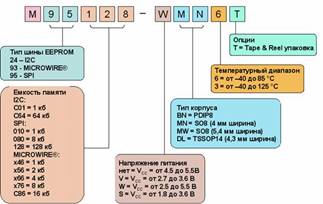
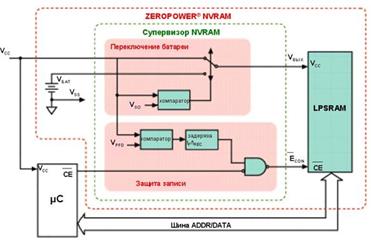
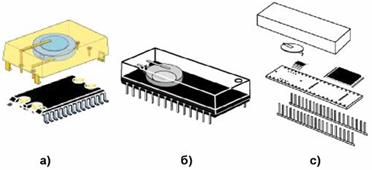
... на стадии разработки, так и в стадии сервисного обслуживания. Таким образом, целью бакалаврской работы – является разработка компонентов инфраструктуры сервисного обслуживания кристалла памяти ГАС. Объектом работы – является встроенная в ГАС память на кристалле. 1. анализ технического задания 1.1 Системы на кристалле. Общие представления Выражение "система на кристалле" не является, ...
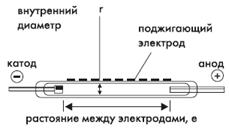
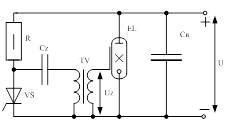
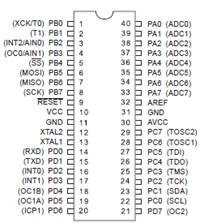
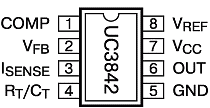
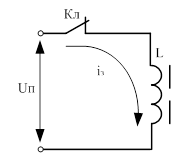
... , КФ1158ЕНхх с малым падением напряжения вход - выход охватывает диапазон выходных напряжений от 3 до 15В. Все стабилизаторы предназначены для широкой области применения и идеально подходят для нужд автомобильной электроники, так как имеют встроенную защиту от выбросов входного напряжения при сбросе нагрузки генератора до 60 В, защиту при подключении входного напряжения в обратной полярности и от ...
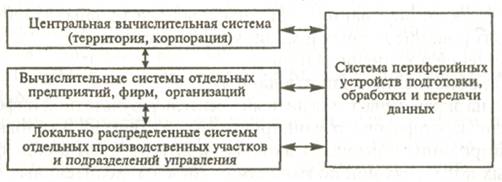
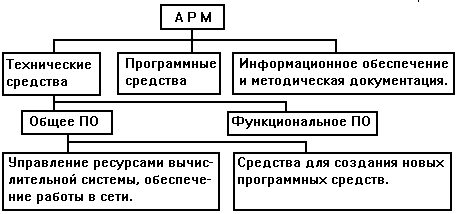

... информации и ее достоверность, что необходимо для эффективного планирования и управления. 1.3 Информационная технология проектирования автоматизированного рабочего места и эргономика аппаратных и программных средств АРМ В современных условиях автоматизированные рабочие места не создаются с нуля. В экономике практически на всех уровнях управления и во всех экономических объектах (от органов ...
0 комментариев