Навигация
Регистратор дискретных сигналов
17713
знаков
3
таблицы
0
изображений
Содержание
Введение
Постановка задачи
Аппаратная часть
2.1 Структура устройства
2.2 Описание принципиальной электрической схемы
2.3 Описание используемых микросхем
2.4 Конструкция устройства
Программное обеспечение микроконтроллера.
3.1 Логическое проектирование
3.2 Программа на языке ассемблера.
3.3 Технология программирования ОМК и отладки
Заключение
Литература
Приложения:
Приложение А – листинг программы
Введение
Современный этап развития человеческого общества характеризуется все возрастающим проникновением электроники во все сферы жизни и деятельности людей. Достижения в области электроники в значительной мере способствуют успешному решению сложнейших научно-технических проблем, повышению эффективности научных исследований, созданию новых видов машин и оборудования, разработки эффективных технологий и систем управления, получению материалов с уникальными свойствами, совершенствованию процессов сбора и обработки информации и др.
Охватывая широкий круг научных, технических и производственных проблем, электроника опирается на достижения в различных областях знаний. При этом, с одной стороны, электроника ставит перед другими науками и производством новые задачи, стимулируя их дальнейшее развитие, а с другой – вооружает их качественно новыми техническими средствами и методами исследования. Результаты изучения электронных процессов и явлений, а также исследования и разработка методов создания электронных приборов и устройств получают свое воплощение в многообразных средствах электронной техники, развитие которой происходит по двум тесно переплетающимся направлениям. Первая из них связана с созданием электронных приборов различного назначения, технологией их производства и промышленным выпуском, второе – с созданием на основе электронных приборов различных видов аппаратуры, систем и комплексов для решения сложнейших задач в области вычислительной техники, информатики, связи, радиолокации, телевидения, телемеханики, и многих других областях научной практической деятельности человека.
Достижения электронной науки и техники используются почти без исключения во всех областях человеческой деятельности. Ускоренными темпами электроника внедряется в научные исследования, промышленность, на транспорт, в связь, сельское хозяйство, здравоохранение, культуру, быт, военное дело и др. средства электронной техники стали неотъемлемой частью сложных приборов и устройств самого широкого назначения.
Внедрение микропроцессоров (МП) и микро-ЭВМ в управление технологическими процессами рассматривается как новый этап промышленной революции. На их основе развивается производство и применение станков с числовым программным управлением, промышленных роботов, систем автоматического контроля качества продукции, управления цехами и заводами, создаются гибкие автоматизированные технологические участки и цехи (гибкие автоматизированные производства - ГАП), ориентированные на выпуск широкой номенклатуры изделий. Широкое применение электронной техники в промышленности ведет к повышению производительности труда и качества продукции, освобождает человека от выполнения однообразных утомительных операции и работ в условиях опасных для здоровья. На базе электронной техники реализуются основные устройства автоматических систем управления на объектах непрерывного действия – электростанциях, прокатных станах, печах для плавки металла и др.
Применение МП в современных цифровых устройствах управления и обработки информации стало обыденной реальностью. Массовый выпуск микропроцессорных наборов больших интегральных схем (БИС) с широкими функциональными возможностями и низкой стоимостью обеспечила исключительные преимущества цифровым методам информации.
МП техника не только существенно расширяет возможности автоматизации, но и позволяет использовать принципиально новые методы управления на основе математических моделей объектов управления. Широкое использование самых различных средств электронной техники стало естественным и неотъемлемым условием жизни людей.
1. Постановка задачи
Разработать програмно-временное устройство, которое будет в установленное время включать и выключать питание по установленным каналам. Количество каналов – 8. График управления по каналам вводится через COM – порт сразу после включения прибора. Интервал работы – 24 часа. Количество цифр индикатора времени – 4.
2. Аппаратная часть
Структура устройства.
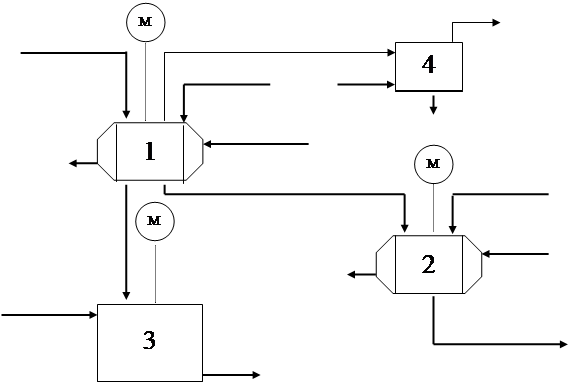
Обобщенная структурная схема програмно-временного устройства представлена на рисунке 1.
Структурная схема включает в себя следующие узлы:
СУ – согласующее устройство COM-порта, предназначено для согласования вводимых сигналов с СОМ-портом микроконтроллера (Тх), а так-же для защиты порта от повышенного напряжения и перегорания. Подключение к внешнему устройству ввода производится с помощью разъема RS232.
МК - микропроцессорный контроллер, реализующий алгоритм включения и выключения каналов. В его состав входят МП, оперативное и постоянное запоминающее устройство (ОЗУ и ПЗУ), порты ввода-вывода (ПВВ), таймеры-счетчики (ТС). Для синхронизации работы этих устройств предназначен генератор тактовых импульсов. Микроконтроллер содержит и осуществляет всю логику работы устройства. В данном устройстве используется микроконтроллер семейства MCS51 марки АТ89С51. Подробное описание устройства и работы микроконтроллера будет описано далее.
DС1 – дешифратор цифровой индикации. Применяется для отображения цифр на цифровых индикаторах. На входе четырехразрядный двоично-десятичный код цифры, на выходе семиразрядный код для семисегментного индикатора. Подключается к порту Р1 микроконтроллера (биты 1 - 4)
DC2 – дешифратор, предназначенный для управления блоком индикаторов в динамическом режиме, разрешая зажигание одной установленной цифры. На входе двоичный номер цифры, на выходе включение одного вывода соответствующего номеру. Подключен к порту Р1 микроконтроллера.(биты 4 и 5)
БЦИ – блок цифровой индикации. Состоит из девяти семисегментных цифр. В разрабатываемом устройстве используется только 4.
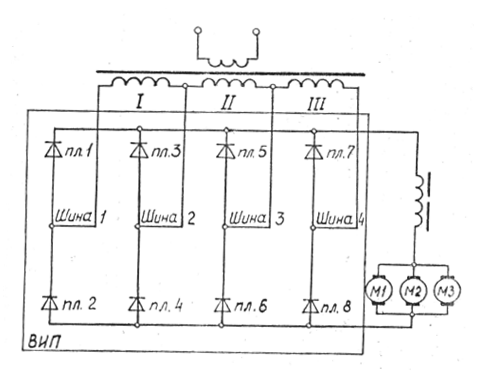
Кроме того на схеме и изображены кнопка пуск, по нажатии которой запускается таймер и начинается работа устройства, и блок включающий питание на выходе по каждому из восьми каналов отдельно, подключен к порту Р0 микроконтроллера. Косая черта и цифра над ней обозначает что идет не один провод а несколько, количество которых показано цифрой.
Описание принципиальной электрической схемы
Для питания схемы используется внешний источник питания напряжением 5В, подключаемый к разъему Х1.
Восемь линий порта Р0 микроконтроллера DD1 используем для включения подачи сигнала на выход. После включения устройства все порты микроконтроллера установлены на высокий потенциал. При срабатывании таймера на соответствующая линия порта меняет потенциал на низкий, при этом открывается соответствующий транзистор (VТ2-VТ9) и подается напряжение на соответствующую линию выходного канала. При установки высокого потенциала по истечение установленного времени для данного канала транзистор снова закрывается и подача питания на выход прекращается. Выходные каналы объединены разъемом Х2.
К порту Р1 подключен блок цифровой индикации НG1 через два дешифратора DD2 и DD3. Блок индикаторов содержит 9 цифр из которых используется в устройстве всего 4. Схема подключения с общим катодом. Индикаторы работают в динамическом режиме, т. е. Включаются поочереди с быстрой частотой, незаметной глазу наблюдателя. На рисунке показан график включения индикаторов (0 – включен, 1 - выключен).
Т=20мс
t=5мс
Остальные выводы просто не используются и ни к чему не подключаются. Дешифратор DD2 подключен к 0 – 3 выводам порта Р1. Он преобразует четырехразрядный код цифр в семиразрядный код для индикатора и подключается к выводам А-G блока индикаторов.
Дешифратор DD3 подключен к выводам 5,6 порта и преобразует двоичный код номера индикатора в сигнал на соответствующей линии выхода.
На неиспользуемые линии на входе подаем низкий потенциал (ноль).
К линиям Х1 и Х2 подключен генератор тактовых импульсов ZQ1 частотой 12МГц. К линии Т0 подключена кнопка пуска таймера. Ввод команд осуществляется через порт Rx который через согласующее устройство выходит на разъем Х2 соответствующий Стандартному разъему для СОМ-порта RS232.
Похожие работы

... задаются в поле задания уставок. 6. Безопасность и экологичность проекта В основной части дипломного проекта рассмотрены вопросы, связанные с модернизацией релейной защиты РУ-27,5 кВ тяговой подстанции Заудинск ВСЖД. Наличие на подстанции высоковольтного оборудования и значительных по величине токов определяет выбор темы, и содержание раздела "Безопасность и экологичность проекта", связанных ...
... 1%; 16 бит Гальваническая развязка Между входами и внутренней схемой (между каналами нет) Потребляемый модулем ток от источника питания, мА 500 1060 3. Основные решения по автоматизации. В процессе нитрования пиридона показателем эффективности является концентрация азотной кислоты в реакторе, и целью управления является её поддержание на заданном уровне (Скк = Сккзд). Расход пиридона ...
... автоматическое управление электроприводом и электрическими аппаратами серийного электровоза ЭП1 в режимах тяги и торможения. При этом аппаратура МСУД обеспечивает: разгон электровоза до заданной скорости с заданной и автоматически поддерживаемой величиной тока якоря тяговых электродвигателей и последующее автоматическое поддержание заданной скорости, рекуперативное торможение до заданной скорости ...

... нельзя проводить отбор отдельных компонентов ИС по допуска, как это имело место в схемах дискретных электорадиоэлементах в ЭВМ третьего поколения. Разработка генератора на цифровых микросхемах. Для проверки и настройки цифровых интегральных микросхемах транзисторно-транзисторной логики (ТТЛ) требуются генераторы прямоугольных импульсов. Ниже описывается генератор импульсов, выполненный всего на ...
0 комментариев