Навигация
1. Устройства ввода
предназначены для ввода данных и программ, а также для внесения исправлений в программу и данные, хранящиеся в памяти ЭВМ. Подразделяются на неавтоматические (ручные) и автоматические. Автоматические характеризуются тем, что в них информация вводится с промежуточного носителя информации: с перфолент, перфокарт, магнитных носителей, с напечатанных текстов и графиков, с человеческой речи. Их быстродействие выше, чем у ручных. Ручные устройства отличаются меньшим быстродействием, но позволяют корректировать информацию в процессе ввода. К ним относятся различные клавиатуры, пульты управления.
2. Устройства вывода
Служат для вывода из ЭВМ информации, результатов обработки данных, отображая ее в виде таблиц, текстов, графиков. Они разделяются на :
- устройства вывода на промежуточный или машинный носитель (перфокарты, перфоленты, магнитные носители)
- устройства для вывода и фиксации информации в виде текстов, графиков, таблиц (печатающее устройство, графопостроитель, дисплей).
- устройства вывода информации во внешнюю среду (ЦАП, вывод на линию
связи)
29. ВЫВОД ИНФОРМАЦИИ НА ДИСПЛЕЙДисплей является наиболее удобным устройством общения человека с машиной. Он позволяет набирать информацию на клавиатуре, высвечивать ее на экране, записывать ее в память машины, исправлять введенную информацию. Связь ЭВМ и дисплея осуществляется через блок интерфейса. Информация, набранная на знаковой клавиатуре через блок интерфейса записывается в память ЭВМ. Информация, которая должна быть выведена на экран через блок интерфейса записывается в буферном ЗУ (БЗУ). Объем БЗУ равен количеству знаков, которые могут быть одновременно высвечены на экране. После того, как БЗУ полностью загружено, дисплей переходит в автономный режим работы. Код знака, записанного в БЗУ, является командой, по которой из ПЗУ микропрограмм считывается микропрограмма воспроизведения данного знака. Микрокоманда этой микропрограммы подается на устройство управления лучом, которое преобразует эти микрокоманды в аналоговые сигналы, управляющие отклоняющими системами ЭЛТ. Существуют два способа развертки луча на экране ЭЛТ:
1. функциональный; при этом луч перемещается в пределах одного знакоместа, т.е. прочерчивает знак за знаком
2. растровый; при этом луч двигается по строчкам и высвечивает каждый знак послойно. Количество высвечиваемых знаков может быть от 128 до 4000 и зависит от типа экрана.
Дисплей позволяет исправлять введенную информацию с помощью маркера и светового пера. Маркер совмещают со знаком, который нужно исправить и на функциональной клавиатуре нажимают кнопку "СТИРАНИЕ". В ячейке БЗУ уничтожается этот знак. Затем набирается нужный и нажимают на кнопку "ВОЗВРАТ".
Конец светового пера, на котором находится фотодиод, подводится к тому знаку, который нужно уничтожить. По сигналу светового пера устройство управления определяет координаты знака на экране и в БЗУ. По этому адресу информация может быть изменена или уничтожена.
Для получения немерцающего изображения на всех экранах на ЭЛТ блок управления должен обеспечивать скорость воспроизведения 50 символов в сек.
30. ВЫВОД ИНФОРМАЦИИ НА ТЕЛЕТАЙП
В исходном состоянии ток протекает через обмотку электромагнита приемника и передатчика телетайпа. Схема формирования импульса остановки представляет собой триггер, который находится в единичном состоянии до прихода импульса начала печати. Ток, протекающий через обмотку электромагнита притягивает якорь к сердечнику. С приходом импульса начала печати триггер опрокидывается в нулевое состояние, закрывая усилитель мощности. При этом
формируется нулевой пусковой импульс. Длительность импульса пуска 20 мкс, как и у рабочих импульсов при передаче символов.Под действием импульса пуска обесточивается обмотка электромагнита. Якорь отлипает от сердечника, приводя в готовность наборные линейки печати символов. Схема формирования импульса печати формирует импульс печати с длительностью, равной пяти длительностям рабочих импульсов при передаче 5 - ти разрядного кода. Импульс печати подается на схему "И", на второй вход которой подается код символа из регистра. Код символа поразрядно вперед младшим разрядом. Рабочие импульсы, соответствующие "1" открывают усилитель мощности, соответствующие "0" - закрывают, соответственно притягивая или отпуская якорь от сердечника. При этом якорь управляет набором линеек.
По окончании импульса печати формируется импульс останова. Этот импульс соответствует логической "1", длительностью в 1.5 раза больше длительности рабочего импульса. Набранный знак во время импульса останова печатается на бумажной ленте. Т.к. инерционность механических частей больше, чем у электронных, то длительность импульса останова больше, чем рабочего.Код знака подается из канала связи в параллельном коде, а из регистра - в последовательном. Схема формирования импульса сдвига управляет последовательным перемещением старших разрядов в направлении младших.
Телетайп является механическим знакопечатающим устройством, которое выводит информацию на бумажную ленту, а следовательно обеспечивает длительное сохранение информации.
31. ИНТЕРФЕЙС
Устройства вычислительной системы соединяются друг с другом с помощью унифицированных систем связи, называемых интерфейсом. Интерфейс представляет собой систему шин, согласующих устройств, алгоритмов обеспечи-вающих связь всех частей ЭВМ между собой. От характеристик интерфейса зависит быстродействие и надежность ЭВМ. Интерфейс должен быть стандартизирован с тем, чтобы он обеспечивал связь процессора и оперативной памяти с любым периферийным устройством (ПУ). Необходимое преобразование формата данных должно производиться в ПУ. Алгоритмы функционирования интерфейса и управляющего сигнала также должны быть стандартизированы. Схемы интерфейса обычно располагаются в самих связываемых устройствах.
Типы интерфейса:
1. Интерфейс ОЗУ - через него производится обмен данными между ОЗУ и процессором, между ОЗУ и каналами ввода - вывода. Ведущим в обмене данными, т.е. начинающим операцию обмена, является процессор и каналы ввода - вывода, а исполнителем - ОЗУ. Этот интерфейс является быстродействующим. Информация через него передается словами и полусловами.
2. Интерфейс с процессором - через него происходит обмен информацией между процессором и каналами ввода - вывода. Ведущий - процессор, исполнитель - каналы. Интерфейс является быстродействующим. Обмен информацией через него происходит словами и полусловами.
3. Интерфейс ввода - вывода. Через него происходит обмен информацией между каналами ввода - вывода и устройствами управления ПУ. Обмен информацией производится байтами. Его быстродействие меньше, чем у первых двух типов.
4. Интерфейс периферийных аппаратов (ПА). Через него происходит обмен информацией между устройствами управления ПА и самими ПА. Он не может быть стандартизирован, т.к. ПА очень разнообразны.
Интерфейсы могут быть односвязными и многосвязными.
При односвязном интерфейсе общие для всех устройств шины используются всеми устройствами, подключенными к данному интерфейсу, на основе разделения времени.
При многосвязном интерфейсе одно устройство связывается с другими устройствами по нескольким независимым магистралям.
Односвязный интерфейс применяется в малых и микро ЭВМ, а многосвязный - в средних и больших ЭВМ. Многосвязный интерфейс характеризуется тем, что каждое устройство снабжается одной выходной магистралью для выдачи информации и несколькими входными для приема информации от других устройств.
При неисправности какой - либо входной шины или сопряженных с ней согласующих устройств, оказывается отключенным только одно периферийное устройство. Интерфейс автоматически определяет неисправное ПУ и выбирает исправные и незанятые магистрали. МП в зависимости от заданной программы выбирает последовательность опроса датчиков, т.е. вырабатывает управляющие сигналы обмена информацией по выбранному каналу и осуществляет сбор и обработку данных.
По цифровому каналу связи сигнал может передаваться параллельно или последовательно. Параллельная передача цифрового сигнала требует отдельные линии для каждого разряда, но является более быстродействующей. При последовательной передаче цифровые сигналы передаются последовательно по одной линии связи. По способу передачи информации во времени интерфейс может быть синхронный и асинхронный. Синхронный характерен постоянной временной привязкой, а асинхронный - без постоянной временной привязки. При синхронной передаче данных синхронизирующие сигналы МП задают временной интервал, в течении которого считывается информация с одного датчика. Временной интервал определяется наибольшим временем задержки в системе передачи данных и максимальным временем преобразования аналогового сигнала в цифровой. Асинхронная передача данных характеризуется наличием управляющих сигналов: "Готовность к обмену", вырабатываемый датчиком исходной информации; "Начало обмена", "Конец обмена", "Контроль обмена", вырабатываемые МП. При такой организации обмена автоматически устанавливается рациональное соотношение между скоростью передачи данных и величинами задержки сигналов в канале связи.
32. ОБМЕН ДАННЫМИ МЕЖДУ ОПЕРАТИВНОЙ ПАМЯТЬЮ И ПЕРИФЕРИЙНЫМИ УСТРОЙСТВАМИ (ПУ) 1. Программно управляемый обмен данными. В этом случае передача данных от ПУ в память и обратно производится через МП в соответствии с микропрограммой, записанной в ОЗУ, МП руководит обменом и операция обмена происходит так же, как и операция основной программы. Операция ввода - вывода активизируется текущей командой программы или запроса от ПУ. При программном управлении передачей данных процессор "отвлекается" от выполнения основной программы на все время операции ввода - вывода, следовательно снижается производительность ЭВМ. Для ввода блока данных необходимо слишком много операций, таких как преобразование форматов, адресация в памяти, определение начала и конца блока данных. В результате скорость передачи данных снижается. Дешифратор определяет номер ПУ, с которым будет происходить обмен данными в соответствии с программой. Мультиплексор передает данные от одного из ПУ соответствующего номера через МП в ОЗУ. После того, как дешифратор определил номер ПУ и МП послал запрос об обмене данными, МП ждет сигнала готовности от ПУ. Демультиплексор передает данные из ОЗУ на одно из ПУ.
2. Обмен данными с использованием прямого доступа к памяти (ПДП). При этом МП освобождается от участия в обмене данными. ОЗУ связывается с МП и с аппаратурой, руководящей обменом данных разными шинами. Обменом данными полностью управляют с помощью аппаратных средств. Инициатором обмена данными является ПУ, которое посылает запрос об обмене данными на флажок запроса ПДП. Флажок запроса активизирует блок ПДП. Блок ПДП посылает в память сигнал чтения или записи и определяет ячейку ОЗУ, с которой начнется обмен данными. Блок ПДП посылает эти сигналы, после того, как получит от МП сигнал подтверждения. Регистр данных передает данные из ОЗУ в ПУ и из ПУ в ОЗУ. При ПДП процессор освобождается от управления операциями ввода - вывода и может параллельно выполнять основную программу. ПДП обеспечивает более высокое быстродействие и более высокую производительность работы ЭВМ.
33. ОБМЕН ДАННЫМИ ПО ПРЕРЫВАНИЯМ
Прерывание работы МП по запросу внешних устройств устраняет необходимость выполнения МП неэффективных операций по проверке готовности внешних устройств к обмену данными и снижает затраты времени на ожидание готовности периферийного устройства к обмену. Прерывания необходимы при обмене данными с большим числом асинхронно работающих внешних устройств. Прерываемая программа должна содержать команду EI в начале участка основной программы, где допускаются
прерывания.
Виды запросов на прерывание бывают:
1. немаскируемые - которые реализуются аппаратно и поступают в МП по отдельной шине управления. Немаскируемые запросы обладают наивысшим при-оритетом. К ним относятся запросы от схем питания и контроля правильности передачи данных. Снижение уровня питания представляет опасность потери информации. Схемы контроля питания подают запрос прерывания и совершают переход к подпрограмме аварийной перезаписи в ОЗУ с батарейным питанием или во внешнее ЗУ. В блоке питания предусмотрены емкостные фильтры, которые поддерживают уровень питания на время, достаточное для перезаписи.
2. маскируемые запросы поступают от внешних устройств. В блоке управления МП есть триггер разрешения прерывания. Этот триггер по команде EI устанавливается в единичное состояние в конце участка основной программы, на котором находится команда DI блокировки прерываний, по которой триггер устанавливается в нулевое состояние. Состояние триггера выдается на выход МП, который называется "РАЗРЕШЕНИЕ ПРЕРЫВАНИЙ", и если на этом выходе "1", то запрос принимается. Момент появления запроса не связан с выполнением основной программы. МП продолжает выполнять текущую команду основной программы. Он должен запомнить результат выполнения этой команды и номер команды возврата и приступить к выполнению прерывающей программы. На выход МП "ПОДТВЕРЖДЕНИЕ ПРЕРЫВАНИЯ" передается сигнал о том, что в данном цикле производится прием одного байта команды. Команда RST начинает удовлетворение запроса на прерывание; по этой команде в стек записывается результат выполнения команды основной программы и номер команды возврата.
Прерывающая программа начинается с команды RESTART (RST), по которой из стека передается номер команды возврата и результат выполнения последней команды перед прерыванием. Перед командой RET должна быть команда снятия запрета на прерывание - EI, иначе триггер будет в нуле и одна и та же прерывающая программа будет выполняться бесконечно. 34. СПЕЦИАЛИЗИРОВАННЫЕ УСТРОЙСТВА ИНТЕРФЕЙСА. АЦП К специализированным устройствам интерфейса относятся АЦП, ЦАП, преобразователи кодов. Специализированные устройства преобразуют информацию к виду, удобному для восприятия данной машины (это делают АЦП и преобразователи кодов). ЦАП преобразуетинформацию к виду, удобному для восприятия периферийным устройством. Преобразование аналоговой информации в цифровую основано на теореме Котельникова: любой аналоговый сигнал может быть записан в дискретной форме и информация не будет потеряна, если шаг квантования Dt будет выбран из условия:
, где F max - максимальная частота спектра передаваемого сигнала.
В данной схеме происходит промежуточное преоб-разование напряжения Uвх в длительность импульса триггера, которая в свою очередь определяет количество импульсов генератора импульсной последовательности (ГИП) со считанных счетчиком. Счетчик выдает результат в двоичном коде, следовательно показания счетчика пропорциональны Uвх. Тактовый импульс запускает генератор линейно изменяющегося напряжения (ГЛИН) и обнуляет счетчик. В двух компараторах К1 и К2 происходит сравнение напряжения ГЛИН с "0" и с Uвх. Когда уровень напряжения ГЛИН равен "0", то на выходе К1 вырабатывается сигнал, который устанавливает триггер в единичное состояние. На схему "И" подается единичный сигнал с выхода триггера и последовательность импульсов с выхода ГИП. Импульсы ГИП подаются на счетчик, который их считает. Когда напряжение "пилы" станет равным Uвх, сигнал с выхода К2 "опрокинет" триггер в нулевое состояние, импульсы через схему "И" не проходят, счет прекращается. Количество прошедших импульсов пропорционально Uвх. Т.к. напряжение "пилы" строго говоря не является линейным, особенно на начальном участке, то точность преобразования не велика. Большую точность обеспечивают АЦП с ОС и АЦП следящего типа. 35. АЦП С ОБРАТНОЙ СВЯЗЬЮ (ОС)ЦАП вырабатывает напряжение ОС. Это напряжение имеет ступенчатую форму. С приходом тактового импульса счетчик начинает считать от генератора импульсной последовательности (ГИП). Счет прекращается при подаче нулевого сигнала с вых. компаратора. Этот сигнал вырабатывается в том случае, если напряжение ОС больше или равно Uвх. Количество сосчитанных импульсов пропорционально Uвх в двоичном коде.
36. АЦП СЛЕДЯЩЕГО ТИПА.
АЦП с ОС преобразует в двоичный код только возрастающее Uвх. АЦП следящего типа преобразует в цифровой сигнал как возрастающее, так и убывающее напряжение. В этой схеме применяется реверсивный счетчик. Когда на вых. компаратора (К) единичный сигнал (Uвх > Uос) счетчик находится в режиме прямого счета. Когда Uвх Ј Uос, на выходе К - "0" и счетчик переходит в режим обратного счета.
37. ЦАП С СУММИРОВАНИЕМ НАПРЯЖЕНИЯ НА ОПЕРАЦИОННОМ УСИЛИТЕЛЕ (ОУ). ЦАП преобразует информацию в двоичном коде в непрерывную. На его выходе формируется ступенчатое напряжение. Точность воспроизведения зависит от шага квантования и величины "ступеньки". Ни шаг квантования, ни величину "ступеньки" нельзя уменьшить ниже технических возможностей схемы. Схемы ЦАП могут строиться с суммированием напряжения или тока на ОУ или как аттенюатор сопротивлений.
В этой схеме триггеры образуют регистр, в который заносится двоичный код числа. Коэффициент передачи ОУ для выхода каждого триггера является взвешенным в соответствии с разрядом числа, хранимого в триггере:
Напряжение с выхода триггера n-ного разряда передается на выход усилителя с коэффициентом передачи:
т.е. он в 2 раза больше, чем коэффициент Kn-1. Следующий весовой коэффициент n-ного разряда в 2 раза больше весового коэффициент n-1 разряда. Если считать, что уровень "1" соответствует Е, а уровень "0" - 0, то:
где N - десятичное значение преобразуемого двоичного числа, записанного в регистре.
Е - напряжение питания триггера, соответствующее логической "1"
Величина ступеньки определяется уровнем "1" и не может быть меньше напряжения питания.
НЕДОСТАТОК: нестабильное питание триггера и необходимость точного подбора большого числа номиналов сопротивлений на входе ОУ.
38. ПРИМЕНЕНИЕ МИКРО ЭВМ В СИСТЕМАХ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ (САУ)
Примером САУ можно считать можно считать станок с ЧПУ. САУ должна поддерживать какой - либо параметр на заданном уровне. В качестве регулируемого параметра может быть угол резания резца.
Задание представляет собой входное воздействие Х, которое в САУ называется входным воздействием. На объект управления воздействует возмущающее воздействие Е, которое представляет собой износ режущего инструмента и влияние материала заготовки. Выходная величина Y представляет собой действительное значение угла резания. Это действительное значение с помощью датчика состояния объекта преобразуется в электрический сигнал. Контроллер преобразует аналоговый сигнал в цифровой и передает в управляющую микро ЭВМ. В память микро ЭВМ также передается заданное значение регулируемого параметра в двоичном коде. ЭВМ сравнивает эти значения и вырабатывает управляющее воздействие.
Круг задач, решаемых ЭВМ в данной системе и набор действий, предписываемых станку, ограничен. Поэтому для ЭВМ не требуется большого объема памяти, программа может быть записана в ПЗУ и не требуется сети периферийных устройств. Достаточно только клавиатуры и дисплея.
Управляющий сигнал, пропорциональный сигналу рассогласования, подается на интерфейс блока связи с объектом, в котором происходит преобразование цифрового сигнала в аналоговый. Исполнительный механизм (электродвигатель) в соответствии с управляющим сигналом воздействует на объект таким образом, чтобы свести ошибку рассогласования к "0".
Это САУ, применяемая в одном цехе, может быть связана с большой ЭВМ, применяемой для управления целым заводом. В этом случае она подключается через каналы связи к большой ЭВМ, снабженной большим количеством периферийных устройств и имеющей большой объем памяти.
39. СХЕМА СУММИРОВАНИЯ НАПРЯЖЕНИЯ НА АТТЕНЮАТОРЕ СОПРОТИВЛЕНИЙДостоинством данной схемы является то, что в ней используются резисторы только двух номиналов. Величина ступеньки пропорциональна Е/3 и определяется только напряжением стабильного источника Е и не зависит от выходного напряжения триггера.
Триггеры образуют регистр, в котором содержится двоичная информация, которая должна быть преобразована в аналоговую форму. На выходе триггера, прямом и инверсном, находятся ключи. Ключ Кл1 находится на прямом выходе триггера. На второй вход ключа подается напряжение стабильного источника.
В том случае, если в триггере записана 1, то напряжение источника Е прикладывается к R1. Если записан 0, то ключ Кл1 закрыт и нулевой потенциал через ключ Кл1' прикладывается к R1.
В соответствии с записанным числом вырабатывается выходное напряжение, пропорциональное Е/8:
где N - десятичное число
40. ПРИМЕНЕНИЕ МИКРО ЭВМ В ПРИБОРАХ (СПЕКТРОФОТОМЕТР)
Спектрофотометр применяется для качественного и количественного анализа состава жидкого и прозрачного твердого образца. Принцип его действия основан на том, что световой луч по разному поглощается веществом, в зависимости от его состава. Следовательно коэффициент поглощения для разных веществ будет различным. Микро ЭВМ выполняет в этом приборе следующие функции: автоматизация процесса измерения; экспресс обработку результатов измерения; повышение точности прибора; облегчает общение оператора с прибором.
В памяти микро ЭВМ записаны коэффициенты поглощения различных веществ, программа испытаний и программа управления устройством подачи образца (УПО). Монохроматор представляет собой генератор, испускающий световые волны с заданной программой частотой. Светофильтр поглощает все мешающие колебания кроме одного требуемой частоты. Этот луч, проходя через образец, поглощается в зависимости от его состава. Приемник излучения принимает эти колебания, амплитуда которых зависит от коэффициента поглощения и вырабатывает сигнал, пропорциональный изменению амплитуды. Микро - функциональный модуль (МФМ) АЦП преобразует аналоговый сигнал в цифровую форму и передает цифровой сигнал в микро ЭВМ. Микро ЭВМ сравнивает полученные результаты с записанными в памяти и определяет состав вещества. Оператор может набирать программу измерений с помощью клавиатуры и выводить информацию на самописец, табло, на телеграфный аппарат. Блок ручной корректировки позволяет оператору вносить изменения в программу.
41. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ (ПО) ЭВМ.
Состоит из операционной системы (ОС) и программ пользователя. ОС состоит из утилит, библиотеки подпрограмм, языковых трансляторов, программы - компоновщика, редактора, монитора, загрузчика.
Написание программы начинается с постановки задачи и с создания математической модели. Затем пишется алгоритм, который представляет собой пошаговую процедуру решения задачи. Программа пишется на языке высокого уровня. Языки высокого уровня не связаны с архитектурой данной машины.
Программа, написанная на языке высокого уровня называется исходным модулем. Программа - транслятор преобразует исходный модуль программу на языке машинных кодов называется объектным модулем. Машинный код для каждой машины свой. Программа - редактор используется для ввода текста программы в ЭВМ и ее последующего редактирования. Программа - компоновщик связывает объектные модули, являющиеся результатом трансляции программ и подпрограмм считанных из библиотеки подпрограмм. Программа -отладчик позволяет выполнять программу по одной или нескольким командам за один шаг, что позволяет программисту проверять результат выполнения отдельных частей программы.
Для ввода программы с клавиатуры или ВЗУ, используется программа, называемая загрузчиком. В ее функции входит операция чтения или записи по заданному адресу памяти, а так же выполнение работ по отладке и обслуживанию программ. В последнем случае программа - загрузчик называется монитором. Она может быть записана в память машины, тогда она называется резидентной. Выполнение загрузки программы в память начинается с передачи управления по первому адресу программы.
42. ОПЕРАЦИОННАЯ СИСТЕМА ЭВМ
Представляет собой программное обеспечение вычислительного процесса. Она управляет вводом - выводом, загрузкой программы данных в память, трансляцией программы и данных в машинные коды, управляет выполнением программ.
В зависимости от машины некоторые операции выполняются аппаратно, а некоторые программно. Для пользователя это значения не имеет, т.к. он обращается к виртуальной машине. ОС так же нужна для управления файлами. Файлом называется поименованная совокупность однородной информации, размещенной на внешнем носителе и имеющая определенное функциональное значение. В процессе выполнения программы весь монитор или его часть записываются в ОЗУ. В этом случае он называется резидентным. Остальная часть монитора вводится в память ЭВМ по мере надобности. Если надобность в ней отпадает то ОЗУ от нее освобождается.
После включения питания и записи в память монитора ЭВМ приступает к выполнению программы. Запись в память монитора осуществляется либо автоматически либо по команде пользователя. К системным программам относятся так же программы обслуживания ПУ которые могут быть реализованы двумя способами: функциональный и логический. Для создания функциональной программы программист должен знать принцип действия и особенности ПУ. Это затрудняет работу программиста, поэтому на функциональном уровне выполняются только команды готовности к обмену данными и команды прерываний. Во всех остальных случаях используют специальные прерывающие программы, называемые драйверами. Драйвер представляет собой программу обращения к конкретному ПУ. В программе ввода - вывода программист записывает номер ПУ к которому необходимо обратиться. По этому номеру происходит вызов соответствующего драйвера.
Для расширения функциональных возможностей ЭВМ в системное обеспечение ЭВМ входит программа обращения к библиотеке подпрограмм. Библиотека содержит программы стандартных функций, а так же программы ввода - вывода
43. МИКРОПРОЦЕССОРНЫЙ КОМПЛЕКТ К 1804.
Процессор - это цифровое устройство, входящее в ЭВМ и выполняющее обработку информации в соответствии с заложенной в ЭВМ программой. Программа находится в памяти ЭВМ и состоит из отдельных команд, понятных для процессора. В каждой команде содержатся сведения о том, откуда взять исходные данные, какую операцию над ними выполнять и куда поместить результат. Процессор состоит из двух взаимосвязанных устройств: операционного устройства (ОУ) и управляющего устройства (УУ).
ОУ предназначено для выполнения операций. Оно включает в себя в качестве узлов регистры, сумматоры, каналы передачи информации, мультиплексоры для коммутации каналов, дешифраторы и т.д. УУ координирует действие узлов ОУ. УУ вырабатывает в определенной временной последовательности управляющие сигналы, под действием которых в узлах ОУ выполняются требуемые действия. Благодаря достижениям микроэлектроники, обеспечивающей в одной микросхеме упаковку десятков тысяч элементов, такое сложное цифровое устройство, как процессор, разрешается в одном или
нескольких БИС. Слово "большие" относится не к физическим размерам схемы, а к степени интеграции элементов схемы.
Рассмотрим построение и функционирование микропроцессорной секции К1804ВС1, на базе которой создан процессор серийно выпускаемой мини-ЭВМ СМ - 1420.
Микропроцессорная секция (МПС) представляет собой 4-х разрядную секцию, в которой возможны хранение и обработка 4-х разрядных данных. Объединением нескольких секций можно построить многоразрядное ОУ процессора.
БЛОК ВНУТРЕННЕЙ ПАМЯТИ (БВП). В блоке имеется регистровое запоминающее устройство (РЗУ), содержащее 16 4-х разрядных регистров. Адреса регистров представляются 4-х разрядными кодовыми операциями. РЗУ имеет два адресных входа А3...А0 и В3...В0, на которые информация поступает из команды.
Задавая в полях команды адреса А3...А0 и В3...В0, можно одновременно производить чтение и выдачу на выходы А и В РЗУ содержимого любой пары регистров. При совпадении адресов А3...А0 и В3...В0 на оба входа А и В РЗУ передается содержимое одного и того же регистра. Выданное на выходы А и В содержимое регистров РЗУ принимается соответственно в регистры PrA и PrB. Далее эти регистры служат источниками операндов, над которыми выполняются операции. Запись в РЗУ в каждом тактовом периоде может производить лишь в один из регистров, адрес которого задается шиной В3...В0. Записываемые в РЗУ данные поступают на вход РЗУ с выхода арифметико-логического устройства (АЛУ) через узел сдвигателя данных АЛУ (СДА). Данные через СДА могут передаваться без сдвига либо со сдвигом на один разряд влево и вправо. Таким образом, за один тактовый период из РЗУ может быть выдано содержимое двух регистров, над ними в АЛУ выполнена некоторая операция, и полученный в АЛУ результат сдвинут вправо или влево и записан в регистр РЗУ. Выводы PR0 и PR3 в зависимости от направления сдвига служат входом или выходом, через которые производится запись значения в освобождающиеся при сдвиге разряд и выдача содержимого выдвигаемого разряда. Чтение из регистров РЗУ, адресуемых шинами А3...А0 и В3...В0 происходит при высоком уровне тактового сигнала Т.
Вход РЗУ при этом логически отключен, и РЗУ не реагирует на поступающую на вход информацию. Выдаваемые из РЗУ данные принимаются в регистры операндов PrA и PrB, построенные на простых триггерах.
При низким уровне тактового сигнала (временной интервал t2 - t3) входы регистров PrA и PrB логически отключаются от выходов РЗУ и регистры продолжают хранить принятую информацию. При этом в регистр РЗУ, адресуемый шиной В3...В0, производится запись передаваемой через СДА информации таким образом, что чтение и запись в РЗУ разнесены во времени.
БЛОК РАБОЧЕГО РЕГИСТРА Q (БР). Блок содержит одиночный 4-х разрядный регистр Q, построенный на триггерах D - типа. Содержимое регистра постоянно передается в узел АЛУ (в блоке БАЛ). Запись же в регистр может производится по положительному перепаду тактовых импульсов. Данные на вход регистра передаются через узел сдвигателя регистра Q (CP), который работает аналогично узлу СДА блока БВП, передавая записываемые в регистр данные без сдвига либо со сдвигом на один разряд влево или вправо. В отличии от СДА, через который передается либо результат операции с выхода АЛУ либо содержимое самого регистра Q. Последнее обеспечивает возможность выполнения сдвига содержимого регистра Q, производимого параллельно с операцией в АЛУ.
БЛОК АРИФМЕТИКО - ЛОГИЧЕСКИЙ (БАЛ). АЛУ имеет два 4-х разрядных входа R и S. Данные на эти входы поступают с выхода селектора источников данных (СИД). Кроме этих входов АЛУ имеет вход для подачи переноса С0. На вход R АЛУ СИД коммутирует или выход регистра PrA блока БВП или внешнюю шину данных D3...D0 либо передает на этот вход нулевое значение. На вход 8 СИД коммутируют один из трех источников (PrA, PrB, PrQ) или передают нулевое значение.
Результат операции с выхода АЛУ, как отмечалось выше, подается на сдвигатели СДА и СР блоков БВП и БР. Кроме того, результат операции подается на селектор выходных данных (СВД), который коммутирует в выходную шину У3...У0. Содержимое регистра PrA блока БВП либо выход АЛУ. СВД построен на элементах с тремя состояниями и управляется сигналом Е... Передача информации на шину У3...У0 производится при управляющем сигнале Е...= 0, при сигнале Е...= 1 СВД переводится в третье (выключенное) состояние, и микросхема МПС отключается от шины У3...У0.
АЛУ имеет выходы, на которых формируются следующие признаки результата выполненной информации:
- Z - признак нулевого результата (Z=1, если результат равен нулю).
- F3 - старший разряд результата, который может рассматриваться как знаковый разряд.
- С4 - признак переноса (при выполнении арифметических операций С4=1, если возникает перенос из старшего разряда).
- OVR - признак перевыполнения (при выполнении арифметических операций OVR = С3 + С4, где С3 - перенос, передаваемый в старший разряд); если числа представляются со знаковым разрядом, то при
OVR = 1 искажается знаковый разряд, т.е. результат оказывается ошибочным.
Обозначение символом Е - это операция по разрядного суммирования по модулю 2 (эту операцию называют так же операцией "исключающее или" или операцией "неравнозначности").
БЛОК УПРАВЛЕНИЯ (БУ). Блок предназначен для преобразования содержимого поля кода операции i8...i0 команды в систему управляющих сигналов, под действием которых в узлах микросхемы МПС выполняются операции.
44. АССЕМБЛЕР К580
После того, как программа написана на языке высокого уровня она транслируется в машинный код, но программу можно написать на ассемблере, который так же как и машинный код ориентирован на архитектуру данной машины. Ассемблером называется программа - транслятор с символического языка, который называется языком ассемблера. Язык называется символическим, потому что операции в нем записываются в виде сокращений английских названий этих операций.
Рассмотрим операцию сложения 2-х 16-ти значных десятичных чисел, записанных в двоично - десятичном коде. Чтобы сложить их в 8-ми разрядном МП надо повторить операцию сложения 8 раз. Один из регистров используется в качестве счетчика. Две пары регистров используют для указания адресов в ОЗУ, в котором записаны слагаемые. Сложение начинается с младших разрядов. Каждая десятичная цифра записывается 4-мя разрядами, значит в первом цикле будут складываться две десятичные цифры.
Алгоритм решения задачи выглядит следующим образом:
1. Определение в памяти адреса слагаемых.
NA 100(H) - 107(H)
NB 108(H) - 10F(H)
2. Загружаем в аккумулятор два младших десятичных разряда числа NA, которые записаны по адресу 100 (Н)
3. Складываем содержимое аккумулятора и 2 младших десятичных разряда числа NB, записываем по адресу 108 (Н)
4. Записываем результат сложения по адресу NА (100Н)
5. Увеличиваем содержимое регистров А и В на 1, а содержимое счетчика уменьшаем на 1. В аккумулятор помещается содержимое ячейки 101H, которая складывается в аккумуляторе с содержимым ячейки 109H. И так происходит до тех пор пока счетчик не обнулится.
При сложении двоично - десятичных чисел должна проводится операция DAA - десятичной коррекции аккумулятора: которая состоит в том: что если при сложении получилась запрещенная комбинация, то добавляется цифра 6, т.к. перенос в 4-х разрядном двоичном числе формируется на цифре 16, а в десятичном - на цифре 10, то добавляя 6 мы формируем цифру переноса в старший разряд и избавляемся от запрещенной комбинации.
Команда на ассемблере содержит 4 поля, которые отделяются друг от друга пробелом или символами (: ; -) в зависимости от типа ЭВМ.
Первое поле называется меткой или именем. Оно заполнено не всегда, а только в случае многократного обращения к этой команде.
Второе поле - поле операции. Заполняется всегда.
Третье поле - поле операнда. Существуют операции (останов, конец), в которых операнд не указывается.
Четвертое поле - поле комментария. Не транслируется в двоичный код и является поясняющим.
ПРИМЕР ПРОГРАММЫ:
1. LXI D,NA
2. LXI D,NB
3. MVI C.8
4. XRA
5. LOOP: LDAX D
6. ADC M
7. DAA
8. STAX D
9. INX H
10. INX D
11. DCR C
12 JNZ LOOP
ком 1. команда непосредственной загрузки адреса NA в память в регистры D, E (запись 100)
ком 2. команда непосредственной загрузки адреса 108(H) в регистры H,L
ком 3. команда непосредственной пересылки числа циклов (8) в счетчик, которым является регистр С
ком 4. операция очистки или обнуления аккумулятора. Исключает "ИЛИ" или cложение по модулю два содержимого аккумулятора с самим собой.
ком 5. имеет имя, т.к. к ней обращаются неоднократно в процессе выполнения
программы. По этой команде происходит загрузка в аккумулятор содержимого ячейки ОЗУ, номер которой записан в регистрах D,E. Команда косвенной адресации, т.е. в коде команды указывается номер регистра, содержащего номер ячейки ОЗУ, содержащей операнд. На первом шаге это будет ячейка 100(Н)
ком 6. содержимое аккумулятора, которое является содержимым ячейки 100(Н) на первом шаге, складывается с байтом NB, который содержится в ячейке 108(Н). Буква М означает, что NB считывает из ячейки ОЗУ
ком 7. команда десятичной коррекции
ком 8. STORE - команда с косвенной адресацией. Результат сложения помещается в ячейку ОЗУ, номер который записан в регистре D.
ком 9. Инкремент - увеличение на 1 содержимого регистра H
ком 10. Инкремент - увеличение на 1 содержимого регистра D
ком 11. Декремент - уменьшение на 1 содержимого регистра С (счетчика)
ком 12. Команда условного перехода. Если содержимое счетчика не ноль, то
осуществляется переход к метке LOO
Похожие работы
... учитывать возможности по ранее забракованным участкам сети из-за загруженности или неисправности [12]. Алгоритм прост для разработки и хорошо работает в окружения, где трафик сети относительно предсказуем, а схема сети относительно проста. 5. Структурная схема маршрутизатора, реализующего логический метод формирования Рассмотрим процесс нахождения оптимального пути на магистральной сети ...
... хранится все программное обеспечение компьютера. Внешняя память содержит разнообразные виды запоминающих устройств, но наиболее распространенными из них, имеющимися практически на любом компьютере, являются показанные на структурной схеме (рис. 2.) накопители на жестких (НЖМД) и гибких (НГМД) магнитных дисках. Назначение этих накопителей: хранение больших объемов информации, запись и выдача ...
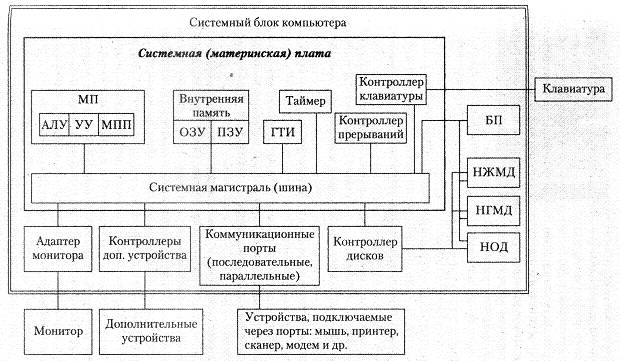
... устройства по интерфейсу и применяемому контроллеру, что обусловливает разницу в емкости, скорости передачи данных и энергопотреблении.[13] Заключение В данной работе была раскрыта структурная схема ЭВМ. Структура компьютера – это некоторая модель, устанавливающая состав, порядок и принципы взаимодействия входящих в нее компонентов. Центральной частью компьютера является системный блок, с ...
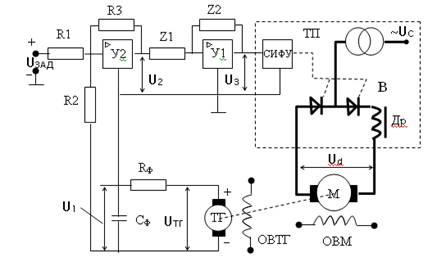
... : Kпмакс = 60/5=12 - Kпзад при заданном значении выпрямленного напряжения UdЗАД=СЕ×nЗАД=1,98×42=83,2(В) Kпзад=83,2/8=10 используется для построения ЛАЧХ САУ в заданном рабочем режиме. (22) 2. Анализ установившегося режима системы 2.1 Составление структурной схемы для установившегося режима Рисунок 11 - Структурная схема для установившегося режима Структурная схема дня ...
0 комментариев