Навигация
Устройство дистанционного управления
52202
знака
0
таблиц
0
изображений
Слово "компьютер" означает вычислитель, то есть устройство для вычислений.
Потребность в автоматизации обработки данных, в том числе вычислений, возникла
очень давно. В 1642г. Б. Паскаль изобрел устройство, механически выполняющее
сложение чисел, а в 1763 Г. Лейбниц сконструировал арифмометр, позволяющий
механически выполнять четыре арифметических операции. Начиная с 19-го века,
арифмометры получили очень широкое применение. Существовала и специальная
профессия счетчик-человек, работающий с арифмометром, быстро и точно соблюдающий
определенную последовательность инструкций. Такую последовательность инструкций
в последствии стали называть программой. Но многие расчеты производились очень
медленно – даже десятки счетчиков должны были работать по несколько недель.
Причина проста – человек выбирающий действия весьма ограничен в скорости.
В первой половине 19-го века математик Ч. Беббидж попытался построить
универсальное вычислительное устройство – аналитическую машину, которая должна
была выполнять вычисления без участия человека. Для этого она должна была уметь
исполнять программы, вводимые с помощью перфокарт (карт из плотной бумаги с
информацией, наносимой с помощью отверстий). и иметь склад для запоминания
данных и промежуточных результатов (в современной терминологии – память). Бебидж
не смог до конца довести работу по созданию Аналитической машины – она оказалась
слишком сложная для техники того времени, однако он разработал все основные
идеи. В 1943 американец Г. Эйкен с помощью работ Бебиджа на основании техники
20-го века – электромеханических реле – смог построить на предприятии фирмы IBM
такую машину под названием "МАРК-1".
К тому времени потребность в автоматизации вычислений (в том числе для военных
нужд – баллистики, криптографии и т.д.) стала настолько велика, что над
созданием машин типа построенных Эйкеном одновременно работало несколько групп
исследователей. Начиная с 1943 г. Группа специалистов под руководством Джона
Мочли в США начала конструировать машину уже на основе электронных ламп, а не
реле. Их машина названная ENIAC, работа в 1000 раз быстрее чем МАРК-1, однако
для задания ее программы приходилось в течение нескольких часов или даже дней
подсоединять нужным образом провода. Специалисты начали конструировать машину,
которая могла бы хранить программу в своей памяти.
Компьютеры 40-х и 50-х годов были очень большими устройствами, – огромные залы
были заставлены шкафами с электронным оборудованием. Все это стоило очень
дорого, поэтому компьютеры были доступны только крупным фирмам. Первый шаг к
уменьшению размеров компьютеров был сделан с изобретением в 1948 г.
транзисторов, которые смогли заменить в компьютерах лампы. И уже во второй
половине 50-х годов появились машины на основе транзисторов. Единственное место
где транзисторы не смогли заменить лампы- это блоки памяти, но там вместо ламп
стали использовать схемы памяти на магнитных сердечниках. В 1965 г. Фирме
Digital Equipment удалось выпустить мини-компьютер размером с холодильник и
стоимостью 20.000$.
Следующий шаг в миниатюризации компьютеров- изобретение интегральных микросхем
или чипов. Затем прогресс компьютеров стал очень стремительным. Вот основные
вехи в эволюции современных компьютеров:
1978г.- Intel процессор 8086
1979г.- Intel процессор 8088
1981г.- IBM PC с процессором 8088
1984г.- IBM PC AT с процессором 80286
1985г.- Microsoft Windows
1988г.- Intel 80386SX
1989г.- Intel 486DX
1990г.- PC с процессором 486DX/25
1992г.- Intel 486DX2
1993г.- Intel Pentium
1995г.- Intel Pentium Pro
1998г.- процессор Pentium с тактовой частотой 600 Мгц
Стремительные темпы компьютеризации всех сторон человеческой деятельности
привели к тому, что сегодня компьютеры, и, прежде всего персональные ЭВМ, стали
непременным атрибутом самых различных технических комплексов. Это касается и
современных систем управления и сбора данных, контрольно-измерительного и
лабораторного оборудования, т.е. любых комплексов, основной задачей которых
является обработка и интерпретация информации, поступающей из "внешнего мира".
Сегодня практически все системы такого рода, за исключением сугубо
специализированных систем, построенных на основе специализированных процессоров,
оснащены персональными компьютерами на процессорах ведущих мировых
производителей, в том числе и Intel. В результате, перед разработчиками и
пользователями любой подобной системы встает задача адекватной стыковки
устройств, которые воспринимают информацию из внешнего мира (датчиков различного
типа), с персональным компьютером, являющимся центральным узлом такой системы.
Компьютер выполняет задачи координации работы системы, обработки поступающей
информации и выдачи ее пользователю в наиболее удобной для него форме.
МЕТОДЫ И СИСТЕМЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ.
Внедрение электронных средств регулировки параметров, характеристик и режимов
передатчика позволяет осуществлять управление передатчиком на расстоянии. Такое
управление, называемое дистанционным, широко используется в профессиональных
передатчиках.
Дистанционное управление радиовещательным передатчиком, находящимся в соседнем
помещении или в этом же, но на расстоянии в несколько десятков метров, создает
для обслуживающего персонала повышенные удобства. Не подходя к передатчику,
оператор имеет возможность включить и выключить передатчик, настроить его на
нужную частоту, переключить источник сигнала, и т.д.
В радиовещательных передатчиках для дистанционного управления используются
ультразвуковые, инфракрасные колебания или управление с помощью линий связи.
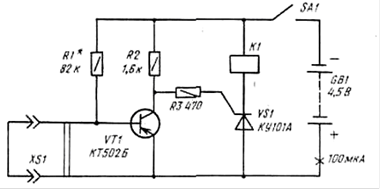
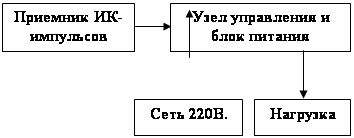
Структурная схема дистанционного управления с использованием источника
инфракрасного колебания
Рис 1.
Структурная схема дистанционного управления с использованием источника
инфракрасного излучения показана на рис.1, Необходимая для управления
передатчиком информация набирается оператором на пульте управления ПУ, сигналы
управления с его выхода после преобразования связи устройством кодирования УК
подаются на фотодиод ФД (излучатель), излучающий инфракрасные импульсы в
направлении фототранзистора ФТ, находящегося на управляемом передатчике.
Принятые фототранзистором импульсы усиливаются и декодируются в устройстве
декодирования УД, с выхода которого сигналы управления поступают на
соответствующие цепи регулировок передатчика. В передатчике с микропроцессорным
управлением пульт может частично или полностью дублировать панель управления
передатчика. Инфракрасные колебания хорошо поглощаются стенами помещения и
расположенной в нем мебелью, при этом практически не создаются мешающие
воздействия устройствам, находящимся в других помещениях.
Системы ДУ на ультразвуковых колебаниях действуют по такому же принципу.
Дистанционное управление передатчиком с помощью линий связи. управления
рассмотрим на примере управления передатчиком декаметрового диапазона. В таких
РПДУ контроль и управление его работой производится из диспетчерского пункта
(ДП), находящегося от передатчика на некотором расстоянии, что повышает
оперативность радиосвязи за счет управления передатчиком с помощью ЭВМ по
заранее заданной программе, а при работе передатчика на необслуживаемых
радиостанциях сокращает обслуживающий персонал.
Радиопередатчик, находящийся на значительном расстоянии (например, много
километров) от оператора или ЭВМ, управляется путем односторонней либо
двусторонней передачи информации.
В первом случае передаются только команды телеуправления (ТУ); во втором для
контроля за работой передатчика организуется обратный канал связи для передачи
информации телесигнализации (ТС).
При дистанционном управлении для каждого органа управления РПДУ
предусматривается либо отдельная линия связи, либо число линий связи меньше
числа объектов управления. В первом случае сигналы передаются с помощью
параллельного кода, во втором случае происходит уплотнение канала связи, и
сигналы передаются с помощью последовательных кодов.
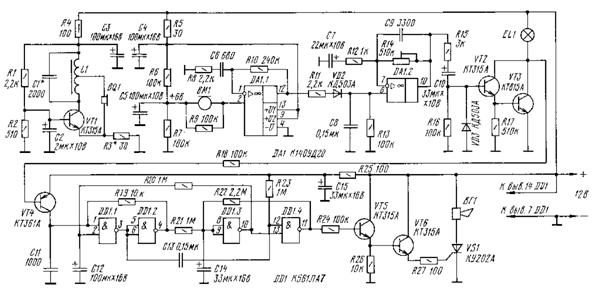
Структурная схема систем телеуправления и телеконтроля
Рис 2.
Система телеуправления и телеконтроля РПДУ состоит из устройств, устанавливаемых
на диспетчерском пункте, канала связи и устройств, устанавливаемых на РПДУ (рис.
2). В блоке вывода на ДП передаваемая информация преобразуется (кодируется и
модулируется) в форму, пригодную для передачи по линии связи к управляемому
РПДУ, содержащему в блоке ввода обратные преобразователи, декодирующие и
демодулирующие устройства. Блок ввода передает информацию от ДП передатчику, а
также вызывает срабатывание визуальных или слуховых индикаторов на передней
панели передатчика; блок вывода снимает информацию с РПДУ для передачи на ДП.
Если необходимо осуществлять управление большим числом передатчиков, для
повышения эффективности канала связи используют общий канал для передачи
сообщений всем РПДУ, т.е. осуществляют уплотнение одного канала связи вторичными
каналами. В основном применяются системы с кодовым разделением каналов, в
которых в каждом вторичном канале, по которому производится управление
конкретным передатчиком, передается специальная кодовая комбинация. На приемной
стороне сигналы с линии связи от ДП параллельно подаются на дешифраторы
передатчиков. Если кодовая комбинация после дешифровки соответствует комбинации,
присвоенной данному РПУД (его адресу), то сигналы ТУ воздействуют на этот
передатчик. При этом либо сам адресный код несет в себе команду ТУ для
передатчика, либо адрес и команды ТУ передаются поочередно. Кодовая комбинация,
передаваемая по линии связи от ДП, может содержать: адрес РПДУ, на который
должна быть передана информация; определяющий вид сообщения; текст сообщения. В
текст сообщения может входить многопозиционная команда ТУ в двоичном или
двоично-десятичном коде, характер двухпозиционной команды, группа
двухпозиционных сигналов ТС и т.д. К двухпозиционным относятся команды "включить
– выключить", "увеличить – уменьшить" и т. д. Адрес и текст могут иметь
различное число элементов в пределах длины кодовой комбинации. Обычно число
импульсов в сообщении и их длительность бывают заданными, поэтому передатчик
может отключаться как в паузах между сигналами, так и во время импульсов начала
сообщения, что повышает помехозащищенность системы. Команды ТУ могут
передаваться и с двойным подтверждением.
Сначала с ДП в РПДУ посылается адрес и текст подготовленной команды. После
декодирования и запоминания адреса это же сообщение поступает обратно на ДП, где
происходит его сравнение с ранее переданным. При совпадении переданного и
принятого сообщений с ДП передается на РПДУ разрешение на исполнение команды,
после получения, которого на ДП поступает соответствующее подтверждение.
Телеуправление может быть построено так, что сначала выбирается группа РПДУ,
затем подгруппа и т. д. Таким образом, выбор для управления требуемого РПДУ
осуществляется в несколько этапов, с применением одинаковых или различных кодов.
Скорость передачи информации ТУ составляет 50—2400 бит/с. Аппаратура ТУ строится
по принципу модульно-блочной конструкции на ИС. Для передачи информации ТУ могут
быть использованы стандартные телефонные каналы проводной или радиорелейной
линии.
Рассмотрим упрощенные структурные схемы блоков вывода и ввода информации с
временным кодовым разделением сигналов для передачи по линии связи сигналов ТУ и
ТС.
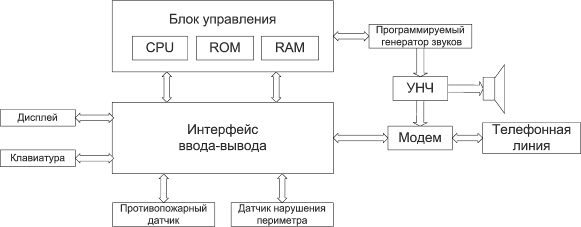
Структурная схема блока вывода.
Рис 3.
Структурная схема блока вывода, который может быть установлен как в ДП для
передачи сигналов ТУ, так и на приемном пункте для передачи сигналов ТС,
показана на рис. 3. Сигналы ТУ (ТС) в виде кодовых комбинаций, имеющих адреса и
тексты, подаются через распределительное устройство РУ на преобразователь кода
ПК. Это преобразование обусловлено тем, что сигналы ТУ подаются с клавиатуры на
РУ в параллельном коде, а передавать сигналы управления по одной линии связи к
приемному пункту необходимо в последовательном коде. В формирователе кодовых
сигналов ФКС для повышения помехоустойчивости в кодовую комбинацию добавляются
синхронизирующие и контрольные импульсы используемого кода. Импульсы кода
преобразуются в модуляторе М для передачи по линии связи к РПДУ. Алгоритм работы
узлов блока вывода задается устройством управления УУ, тактовые импульсы
вырабатываются генератором ГТИ.
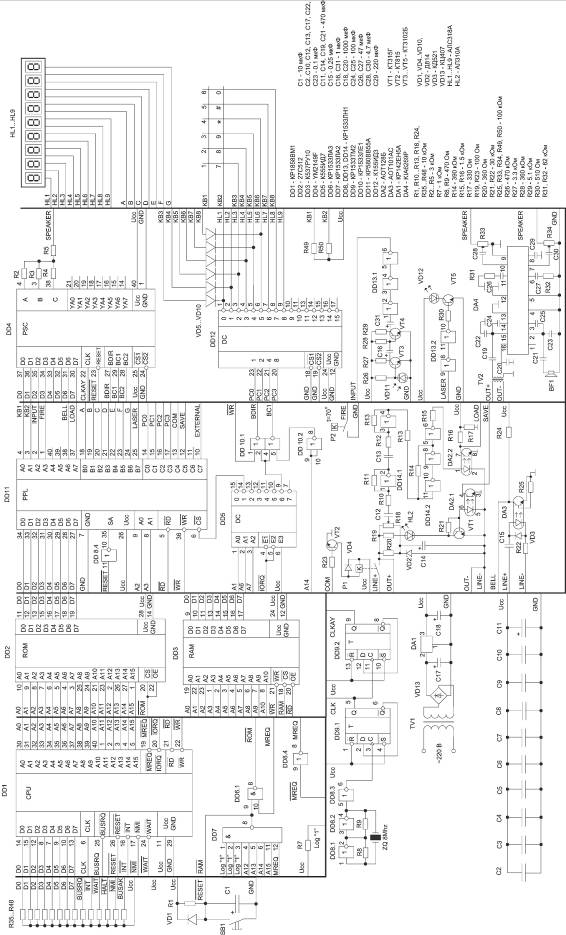
Структурная схема блока ввода.
Рис 4.
Структурная схема блока ввода представлена на рис. 4. Сигнал с линии связи
подается на демодулятор Д, с выхода которого последовательность импульсов
преобразуется в преобразователе кода ПК в параллельные кодовые комбинации. Эти
кодовые комбинации записываются в устройстве центральной памяти УЦП. Адресная
часть этих кодовых комбинаций подается на устройство управления УУ, а тексты с
выхода УЦП— в устройства индивидуальной памяти ИП1— ИПn каждого управляемого
канала. Запись в устройства памяти ИП1— ИПn проводится по соответствующему
сигналу от УУ. В соответствии с выбранным кодом устройство защиты кодов УЗК
вырабатывает сигнал запрета или разрешения на прием неискаженных кодовых
комбинаций. Синхронизация генератора тактовых импульсов ГТИ осуществляется от
селектора тактовых импульсов СТИ.
Рассмотренные методы и способы дистанционного управления и контроля имеют ряд
существенных недостатков:
1) При дистанционном управлении с помощью ИК лучей невозможно осуществлять
управление РПДУ, находящегося в другом помещении, а ведь передатчики именного
из-за своего вредного ВЧ излучения переносятся в более отдаленные помещения.
2) Устройства дистанционного управления и контроля достаточно громоздки,
обладают ограниченным набором функций и команд, трудно поддаются модернизации.
Из-за сложности конструкции обладают низкой ненадежностью и ремонтопригодностью.
Эти недостатки устраняются в компьютерных системах дистанционного управления и
контроля. Такие системы имеют следующие преимущества: малые габариты и высокая
надежность, программное управление, стандартная шина управления, возможность
наращивания и модернизации, а также простота обслуживания.
Похожие работы
... клавиша. Управление ИК диодом осуществляется с помощью транзистора VT1, в базу которого дается большой ток для его полного открывания[3]. 2 Обоснование выбора сопряжения с ПК Устройство дистанционного управления освещением может быть подключено к персональному компьютеру через инфракрасный порт, настроенный на частоту 36 КГц. Компьютер также может заниматься управлением освещения через инфра- ...

... : следить за загрязненностью и загазованностью производственных помещений, поддержание температурно-влажностного режима. Заключение В данном дипломном проекте, который называется “охранная система с дистанционным управлением” разработано устройство, предназначенное для охраны материальных ценностей от пожара и проникновения злоумышленников. Устройство подключается к персональному компьютеру ...
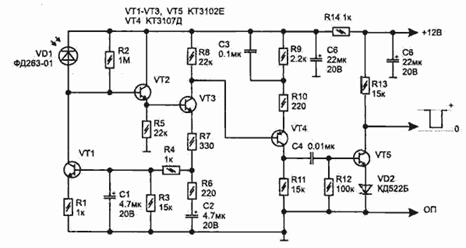
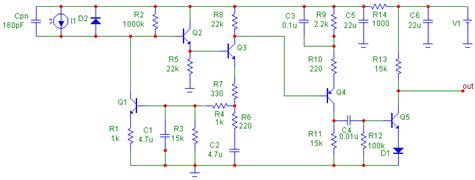
... Характеристики фотодиода ФД263-01 Введение Привычной частью современного телевизора, видеомагнитофона, спутникового тюнера или музыкального центра является пульт дистанционного управления (ДУ) на ИК-лучах. Таким пультом можно также управлять и освещением с помощью небольшой приставки. При этом нажимается одна из кнопок (редко используемых). Данное устройство позволяет с любого пульта ДУ на ...
... (магнитные защелки, задвижки и т.п.) закрывающих элементов с возможностью перемещения их вручную при открывании или закрывании в экстремальных условиях Рассмотрим требования к основным компонентам СКУД. Требования к устройствам идентификации Считыватели должны обеспечивать надежное считывание кода с идентификаторов преобразование его в электрический сигнал и передачу на контроллер. ...
0 комментариев