ИНСТИТУТ ИНТЕГРАЦИИ МЕЖДУНАРОДНЫХ ОБРАЗОВАТЕЛЬНЫХ ПРОГРАММ
КГНУ
Кыргызско-Американский Факультет Компьютерных
Технологий и ИНТЕРНЕТ (КАФ-ИНТЕРНЕТ)
Курсовая работа
По курсу: « Основы теории управления »
Тема: « Исследование системы програмного
регулирования скорости вращения рабочего
органа шпинделя »
Выполнил: студент гр. КИС-3-97
Краснов И.С.
Проверил: преподаватель
Алишеров С. А.
Бишкек – 1999
СОДЕРЖАНИЕ:
ВВЕДЕНИЕ....................................................................................................................................................................................... 2
Исходные данные................................................................................................................................................................ 3
1.Структурная схема системы................................................................................................................................. 5
2. Определение коэффициента усиления электронного усилителя по заданной точности. 7
3. Определение устойчивости системы методом Михайлова А.Б.......................................... 9
4. Коррекция системы..................................................................................................................................................... 10
4.1. Построение ЛАЧХ корректирующего устройства.......................................................................................... 10
4.1.1. ЛАЧХ разомкнутой нескоректированной системы Lнс (w)........................................................................ 10
4.1.2. ЛАЧХ желаемой системы Lж(w)........................................................................................................................ 11
4.1.3. ЛАЧХ корректирующего устройства Lк(w)..................................................................................................... 12
4.2. Техническая реализация корректирующего устройства........................................................................... 13
I-Звено:...................................................................................................................................................................................... 13
II-Звено:..................................................................................................................................................................................... 14
III-Звено:................................................................................................................................................................................... 14
IV-Операционный усилитель:............................................................................................................................................. 15
4.3. Проверка правильности выбора корректирующих звеньев.......................................................................... 16
5. Построение переходного процесса и определение прямых показателей качества. 17
ЗАКЛЮЧЕНИЕ............................................................................................................................................................................. 18
СПИСОК ЛИТЕРАТУРЫ.......................................................................................................................................................... 19
ВВЕДЕНИЕ
Курс теории автоматического управления ставит своей целью ознакомить с общими принципами построения систем автоматического управления, с процессами в этих системах и методами их исследования. Принципы построения систем автоматического управления связаны с общими законами управления, значение которых выходит далеко за пределы технических задач.
Теория автоматического управления сформировалась в самостоятельную науку, в первую очередь на основе изучения процессов управления техническими устройствами. Изучение принципов построения и исследования систем автоматического управления в курсе ОТУ проводится на основе рассмотрения управления различными техническими устройствами, и первое понятие, которое конкретизирует довольно широкое поле деятельности этого курса является автоматическое регулирование. Под автоматическим регулированием понимают поддержание на определенном уровне или изменение по закону некоторых переменных характеристик (регулируемых величин) в машинах и агрегатах без участия человека с помощью различного рода технических средств.
Рассматриваемые принципы управления имеют более широкий общий смысл и могут быть применены при изучении процессов управления в совершенно иных системах, например, в биологических, экономических, социальных и др.
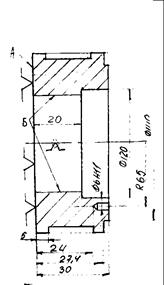
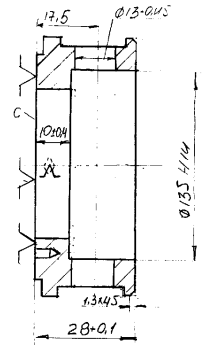
Исходные данные
Задана система програмного регулирования скорости вращения рабочего органа шпинделя.
Рис. 1
На рис.1 использованы следующие обозначения:
ü ОВ ЭМУ – обмотка возбуждения ЭМУ.
ü ЭМУ - электромагнитный усилитель.
ü Д - двигатель постоянного тока
ü ОВД – обмотка возбуждения двигателя.
ü Р – редуктор.
ü ТГ – тахогенератор.
ü У – электронный усилитель.
ü E - ошибка рассогласования.
ü V - скорость изменения напряжения.
ü М – момент инерции шпинделя.
Система регулирования работает следующим образом: с электронного усилителя У усиленный сигнал рассогласования Е поступает на обмотку возбуждения ЭМУ (ОВ ЭМУ), ток, проходящий через ОВ ЭМУ меняется, изменяя тем самым величину магнитного потока, действующего на ротор электромагнитного усилителя (ЭМУ) - увеличивая или уменьшая скорость его вращения, и в зависимости от этих изменений меняется скорость и направление вращения двигателя (Д). Двигатель (Д), редуктор (Р), тахогенератор (ТГ) и шпиндель находятся в жесткой механической связи, поэтому изменения в скорости и в направлении вращения двигателя вызывают соответствующие изменения в скорости и в направлении вращения рабочего органа шпинделя, а также в работе тахогенератора (ТГ), который передвигает ползунок реостата в сторону изменения ошибки несогласования E.
Требуется:
1. Составить структурную схему и вывести уравнения, которыми описываются отдельные элементы и вся система регулирования в целом. Определить коэффициент усиления усилителя из заданной точности.
2. Определить устойчивость и качество переходных процессов в системе с помощью частотных методов.
3. Скорректировать систему.
4. Построить переходный процесс в системе и оценить его качество.
Дано:
| Тэ1 | Тэ2 | Тд | Кэму | Кд | Кред
| Ктг | E,% | V |
| 0,1 | 0, 7 | 2,5 | 4 | 3 | 2 | 0,1 | 0,4 | 0,5 |
1.Структурная схема системы.
На основании принципиальной схемы (рис. 1) составим структурную схему (рис. 2) и рассмотрим все ее элементы для получения передаточной функции всей системы.
Рис. 2
1.1 Усилитель.
(1)
где Ky – коэффицент усиления электронного усилителя.
1.2 ЭМУ
(2)
где Кэму- коэффицент передачи ЭМУ;
Тэ1,Тэ2 - постоянная времени ЭМУ.
1.3 Двигатель
(3)
где Кдв- коэффицент передачи двигателя постоянного тока.
Тдв - постоянная времени двигателя
1.4 Редуктор
(4)
где Кред - коэффициент передачи редуктора
1.5 Тахогенератор
(5)
где Ктг - коэффициент передачи тахогенератора
Пользуясь (рис. 2) и формулами (1-5) составим передаточную функцию разомкнутой системы
(6)
Подставив исходные значения, получим
(7)
2. Определение коэффициента усиления электронного усилителя по заданной точности.
Установившаяся ошибка замкнутой САУ складывается из двух составляющих:
(8)
где -ошибка от задающего воздействия,
-ошибка от возмущения f(t).
Передаточная функция замкнутой системы по ошибке будет иметь вид:
пусть f(t)0, тогда
(9)
Для любого воздействия ошибку можно найти с помощью коэффициентов ошибок, когда(10)
Из 9 и 10 получаем:
(11)
С1,С2,С3,…-коэффициенты ошибок, которые можно найти по следующим выражениям:
Так как мы имеем статическую систему, то
(12)
По условию , тогда
Подставим полученное значение в (7):
Тогда передаточная функция замкнутой системы будет:
(13)
3. Определение устойчивости системы методом Михайлова А.Б.
Характеристическое уравнение системы имеет вид:
где
(14)
Заменив в (14) комплексную переменную р мнимой переменной jw, получим функцию мнимого переменного jw, в котором w может принимать любое значение от + до - :
(15)
Так как ,а , то четные степени jw вещественны, а нечетные линейны
Разделив вещественную часть от мнимой получим:
,
где
-вещественная часть функции А(jw)
-мнимая часть функции А(jw)
Критерий Михайлова можно сформулировать в виде условия перемежаемости корней, т.е. если W0,W2,W4 - упорядоченные корни мнимой составляющей А(jw), а W1 и W2 - упорядоченные корни вещественной составляющей А(jw), то для устойчивости системы необходимо и достаточно выполнения неравенства:
(16)
Корни
W0=-4.342;
W2=0;
W4=4.342.
Корни
W1=-10.989;
W3=10.989.
Подставив в (16):
Видим, что неравенство не верно, значит условные устойчивости не выполняется. Отсюда следует, что система неустойчива и нуждается в коррекции.
4. Коррекция системы.
Выбираем последовательную коррекцию. Коррекция системы состоит из нескольких этапов:
1. Построение ЛАЧХ корректирующего устройства.
2. Техническая реализация корректирующего устройства
3. Проверка правильности выбора корректирующих звеньев.
4.1. Построение ЛАЧХ корректирующего устройства
Чтобы построить ЛАЧХ корректирующего устройства необходимо:
1. Построить ЛАЧХ разомкнутой нескоректированной системы Lнс (w).
2. Построить ЛАЧХ желаемой системы Lж(w).
3. Путем графического вычитания Lж-Lнс получить ЛАЧХ корректирующего устройства Lк(w).
4.1.1. ЛАЧХ разомкнутой нескоректированной системы Lнс (w).
ЛАЧХ разомкнутой нескоректированной системы будет иметь вид:
Lнс(w)=20 lg //
Для построения Lнс найдем опорные частоты:
20lgK = 20lg249=48 дб
4.1.2. ЛАЧХ желаемой системы Lж(w).
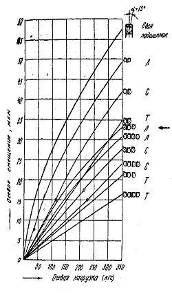
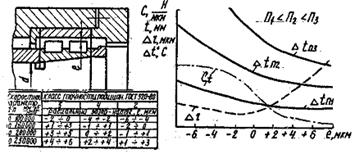
ЛАЧХ желаемой системы построим по методу Солодовникова.
Пусть величина перерегулирования переходного процесса равна G=25%, а время регулирования системы должно быть меньше постоянной времени двигателя, чтобы он успевал обрабатывать управляющее воздействие, т.е.
По номограммам Солодовникова (рис.3) определим tp, запас по фазе и запас по амплитуде Lзап :
Частота среза ЛАЧХ находится из условия:
ЛАЧХ желаемой системы разбивается на три участка:
ü Низкочастотный участок строиться с наклоном –20Vдб\дек, где V – порядок астатизма системы. Т.к. в данной системе V=0, то наклон будет – 0 дб\дек.
ü Среднечастотный участок строится с наклоном – 20дб\дек до пересечения с линиями с некоторым запасом.
ü Высокочастотный участок строится из расчета наименьшей разницы с Lнс (w)
Построение ЛАЧХ желаемой системы начинают со среднечастотного участка.
Построение ЛАЧХ показано на рис 4.
По ЛАЧХ Lж(w) можно найти передаточную функцию желаемой системы:
4.1.3. ЛАЧХ корректирующего устройства Lк(w).
Из формул передаточная функция корректирующего устройства будет иметь вид:
где
Для проверки запасов по фазе и амплитуде необходимо построить ЛФЧХ желаемой системы (рис.4).
| 1.1 | -24.8 |
| 2.5 | -47.3 |
| 10 | -85.1 |
| 130 | -181.1 |
При частоте, на которой пересекает запас по амплитуде системы равен Lзап =16.5 дб, т.е. запас по амплитуде соблюдается по сравнению с заданным (16 дб).
Запас по фазе находится как расстояние между точками и на частоте среза Wс=20. Получено значение , т.е. запас по фазе также соблюдается по сравнению с заданным ( ).
4.2. Техническая реализация корректирующего устройства.
Следующим этапом коррекции системы является реализация корректирующего устройства, которое представляет собой набор четырех-полюсников.
Представим передаточную функцию корректирующего устройства в виде набора звеньев:
I-Звено:
Выберем RC-цепочку, представленную на рис. 5
своей принципиальной схемой и логарифмической
амплитудно-частотной характеристикой.
Рис.5
II-Звено:
Выберем RC-цепочку, представленную на рис. 6
своей принципиальной схемой и логарифмической
амплитудно-частотной характеристикой.
Рис. 6
|
Выберем RC-цепочку, представленную на рис. 7
своей принципиальной схемой и логарифмической
амплитудно-частотной характеристикой.
Рис. 7
Т.о. коэффициент усиления корректирующего звена будет:
необходимо ввести операционный усилитель, чтобы получить Кк=0,014.
IV-Операционный усилитель:Принципиальная схема операционного усилителя
и его краткая форма представления показана
на рис. 8. Определим его параметры:
Рис. 8
После чего схема корректирующего устройства будет иметь вид:
Рис. 9
4.3. Проверка правильности выбора корректирующих звеньев.
Проверка правильности выбора корректирующих звеньев состоит из трёх этапов:
ü Построить ЛАЧХи всех корректирующих звеньев.
ü Построить результирующую ЛАЧХ Lрез(w).
ü Сравнить Lрез с ЛАЧХ корректирующего устройства Lк(w).
Из рис.10 можно сделать вывод, что корректирующие звенья выбраны правильно.
5. Построение переходного процесса и определение прямых показателей качества.
Перехолным процессом называется реакция системы на подачу ко входу единичного скачка 1(t):
Построим переходный процесс с помощью компьютерной программы и определим прямые показатели качества (рис. 11).
К прямым показателям качества относятся:
1. Время регулирования:
при
Определяется точкой последнего попадания графика h(t) в пятипроцентную зону G=0,05. Задано tp=0,4, а получено по графику (рис. 11) tp=0,35.
2. Относительное перерегулирование
Определяется величиной выброса hmax относительно Lуст.
Задано G=25%, а получено G=0%.
3. Максимальное перегулирование : Lmax=1
4. Время наступления Lmax : tmax=0.2
ЗАКЛЮЧЕНИЕ
Мной рассмотрена система программного регулирования рабочим органом шпинделя.
Я построил и описал систему, отвечающую всем качественным требованиям варианта № 7.Были получены определенные значения и показатели, характеризующие данную систему.
В частности:
q для заданной точности был найден коэффициент усиления всей системы.
q по структурной схеме была получена передаточная функция разомкнутой системы , а по последней - передаточная функция замкнутой системы Ф(Р).
q система была проверена на устойчивость частотным методом Михайлова, и в последствии для неё было выбрано последовательное корректирующее устройство
q для системы был построен переходной процесс, по которому я определил прямые показатели качества системы.
Работа содержит достаточно информативные графики и рисунки, которые совместно с текстовым пояснением и формулами помогают легко разобраться в сути данного исследования.
СПИСОК ЛИТЕРАТУРЫ
Методические указания по курсовой работе. Воронов А.А. “Основа и теория автоматического управления” Часть 1, Москва 1965г. Теория автоматического управления под редакцией А.В. Петушила, Часть 1, Москва 1968г.
Похожие работы
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...

... выхода Windows 2000 NTFS постепенно становится все более и более популярной. Основные отличия от FAT32 - неограниченный размер файлов (до 12 TBytes) и возможность управлять правами доступа к файлам и каталогам. 2. УСОВЕРШЕНСТВОВАНИЕ СИСТЕМЫ РЕГУЛИРОВКИ ТЕМПЕРАТУРЫ ЖЕСТКОГО ДИСКА Все знают, если у человека повышается температура выше 36.6 градусов, значит он заболел. То же можно сказать и о ...

... программы и высокой точности обработки деталей); система программного управления реверсивным прокатным станом, включающая в свой контур управляющую вычислительную машину. В относительно медленных технологических процессах в химической и нефтяной промышленности распространены многосвязные САУ, осуществляющие регулирование большого количества связанных величин; так, при перегонке нефти информация о ...


... ряде прикладных программ. Сферы применения Лиспа многообразны: наука и промышленность, образование и медицина, от декодирования генома человека до системы проектирования авиалайнеров. 3. Технологическая реализация системы подготовки обработки детали станка с ЧПУ 3.1 Описание кодов программного модуля Любой проект в Delphi состоит из нескольких частей (набора файлов, каждый из которых ...
0 комментариев