кафедра 301
Лабораторная работа №2
по курсу
“Основы теории автоматического управления”.
Исследование устойчивости и качества процессов
управления линейных стационарных САУ.
группа 03-302 Домнинский М.А.
М.1996.
Задание.
Дана структурная схема
Ку Ка /(ТаS+1) Kk /(T2kS2+2xTkS+1) Y
1)Рассчитать диапазон измерения Ку, в котором САУ устойчива.
2)Показать характер распределения корней характеристического уравнения замкнутой системы и характер переходной функции системы по управляемой переменной (у) на границах устойчивости и вблизи них.
3)Промоделировать САУ (наблюдать процессы на границах вблизи них, сравнить результаты расчета и результаты моделирования.) Сделать выводы.
4)Оформить результаты расчета и результаты моделирования.
Критерий Найквиста.
W(S)=KyK1 / (T1 jw+1)*K2 / (T2(jw)2+2xT1jw+1) K1=2
K2=1,5
W(S)=Ky*2*1,5/(0,01jw+1)(-0,022w2+0,04*0,2jw+1)= T1=0,01
T2=0,02
=3Ky/(-(0,02)2w2+0,008jw+1-0,04*10-4jw3-w20,08*10-3+0,01jw)= x=0,2
=3Ky/((-(0,02)2w2+1-0,08*10-3w2)+j(0,018w-0,04*10-4w3))
c d
Kd=0 3Ky(0,018w-0,04*10-4w3)=0
Ю
K/c=-1 3ky/(-(0,02)2w2+1-0,08*10-3w2)=-1
3Ky(0,018w-0,04*10-4w3)=0
1)w=0
2)0.018=0,04*10-4w2
w2=4500
Ky1=-(-(0,02)2w2+1-0,08*10-3w2)/3=-1/3 (w=0)
Ky2=-(-(0,02)2w2+1-0,08*10-3w2)/3=-(-(0,02)2*4500-0,08*10-3*4500+1)/3=0,3866»0,387
МАИ
кафедра 301
Лабораторная работа №3
по курсу
“Основы теории автоматического управления”
Выделение областей устойчивости в плоскости
двух параметров системы.
группа 03-302 Домнинский М.А.
М.1995
Задание.
Дана структурная схема САУ
Ку Ка /(ТаS+1) Kk /(T2kS2+2xTkS+1) Y
1)Исследовать влияние коэффициента передачи Ку и Т1 на устойчивость методом D-разбиения.
2)Объяснить, почему при Т1®0 и Т1®Ґ система допускает неограничено увеличить Ку без потери устойчивости.
3)Промоделировать САУ и найти экспериментально значения Ку по крайней мере для 3 значений Т1 (устойчив.)
4)Сделать выводы.
1)W(S)=KyK1K2 /(T1S+1)(T22S2+2xT2S+1)
A(S)= KyK1K2+(T1S+1)(T22S2+2xT2S+1)= KyK1K2+T1(T2S2+2xT2S+1)+T2S2+2xT2S+1
S=jw
Ky(K1-K2)+T1(T1S3+2xT2S2+S)+T2S2+2xT2S+1
P(S) Q(S) S(S)
P(jw)=P1(w)+jP2(w)
Q(jw)=Q1(w)+jQ2(w)
S(jw)=S1(w)+jS2(w)
P1=K1K2 P2=0 Q2=-T1w3+w Q1=-2xT2w2 S1=-T2w2+1 S2=2xT2w
P1(w) Q1(w)
D(w)=
P2(w) Q2(w)
-S1(w) Q1(w)
Dm(w)=
-S2(w) Q2(w)
P1(w)-S1(w)
Dn(w)=
P2(w)-S2(w)
D(w)=K1K2w(-T22w2+1)№0
1) 0
Похожие работы
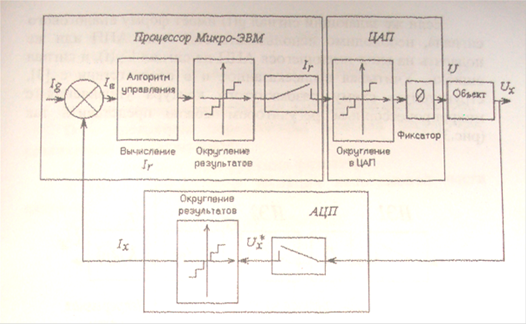

... , Полученные данные будут составлять так называемую неизменяемую часть системы. Получим, что передаточная функция такой неизменяемой части системы имеет вид 2. Структурная схема САУ с микропроцессорным регулятором Поскольку микропроцессорный регулятор построен на базе Микро-ЭВМ и может обрабатывать сигналы только дискретной формы" а сигнал на выходе объекта Ux и регулирующий сигнал Ur - ...



... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... МПа, пределы измерений 0…1,6 МПа МС-П2 3 по месту Приборы в спецификации могут быть сгруппированы по позициям на схеме или по маркам. Часть 3. Современные системы управления производством. 1. Структура АСУ ТП. Характерной особенностью развития современной электронной промышленности является бурный рост, сопровождающийся столь же бурным снижением стоимости средств ...
... . Алгоритм управления показывает, как должно изменяться управление u, чтобы обеспечить заданный алгоритм функционирования. Алгоритм функционирования в автоматической системе реализуется с помощью управляющих устройств. В основе используемых в техники алгоритмов управления лежат некоторые общие фундаментальные принципы управления, определяющие, как осуществляется увязка алгоритма управления с ...
0 комментариев