Навигация
Моделирование цифровой следящей системы
33627
знаков
6
таблиц
0
изображений
3.8. Моделирование цифровой следящей системы
После того как дискретная передаточная функция определена можно приступить к моделированию цифровой следящей системы. Рекомендуется проводить моделирование, используя специализированные пакеты программ: MATLAB-simulink, либо ДИСПАС.
В пакете MATLAB-simulink дискретное звено, также как и непрерывные звенья, набирается по коэффициентам передаточной функции. Никаких дополнительных элементов, учитывающих преобразование сигналов из непрерывных в дискретные и наоборот, вводить в модель не требуется. Все преобразования в системе производятся автоматически.
В пакете ДИСПАС дискретное звено вводится тремя элементами: преобразователем непрерывный сигнал - код, вычислителем и преобразователем код - непрерывный сигнал.
Вычислитель задается рекуррентным уравнением, которое нужно определить из дискретной передаточной функции (см. п.3.9).
ДИСПАС позволяет моделировать дискретное звено, порядок которого не более 3.
Если окажется , что показатели качества скорректированной системы хуже заданных, то нужно вносить в коррекцию соответствующие изменения. Так, если перерегулирование оказалось больше заданного, то нужно увеличивать отрезки L1 и L2. Если время регулирования оказалось больше заданного, то нужно увеличивать частоту среза желаемой ЛАЧХ.
3.7. Определение дискретной передаточной функции
корректирующего звена
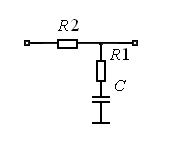
Для получения дискретной передаточной функции звена по его непрерывной передаточной функции рекомендуется воспользоваться билинейным преобразованием. Для этого нужно в непрерывную передаточную функцию корректирующего звена сделать подстановку
Для проведения подобных расчетов можно воспользоваться программой (см. приложение 4), написанной на языке BASIC.
Искомая передаточная функция в общем случае имеет вид:
(3)
C помощью программы определяются коэффициенты Si и Gi передаточной функции (3).
Непрерывная передаточная функция может быть задана либо в форме (2) постоянными времени числителя и знаменателя и коэффициентом усиления звена, либо в форме дробно-рациональной функции коэффициентами полиномов числителя и знаменателя:
(4)
Если в задании на разработку следящей системы указана максимально допустимая ошибка слежения Хmax при условии, что входной сигнал может изменяться с максимальной угловой скоростью womax и с максимальным угловым ускорением eomax , то для выполнения этих требований необходимо, чтобы желаемая ЛАЧХ не попадала бы в запретную область.
Запретная область строится следующим образом. Отмечаем на чертеже точку В с координатами:
.
От точки В вправо проводим прямую линию с наклоном
-40 дБ/дек, а влево - прямую линию с наклоном -20 дБ/дек.
Если ЛАЧХ, построенная по заданному коэффициенту Кс , попадает в запретную область, то это означает, что при данном коэффициенте Кс заданная точность слежения не может быть обеспечена и нужно его увеличить, т.е. поднять желаемую ЛАЧХ так, чтобы она не попадала в запретную область.
По виду ЛАЧХ желаемой можно записать передаточную функцию непрерывной скорректированной (желаемой) системы. Для рассматриваемого примера (кривая б-б-б... рис.3) передаточная функция имеет вид:
(1)
Для определения передаточной функции желаемой системы можно воспользоваться программой , приведенной в приложении 4. Программа написана на языке BASIC и позволяет найти постоянные времени T1, Т2, Т3 желаемой передаточной функции по показателям качества sm и tp. При этом передаточная функция записывается в виде
(2)
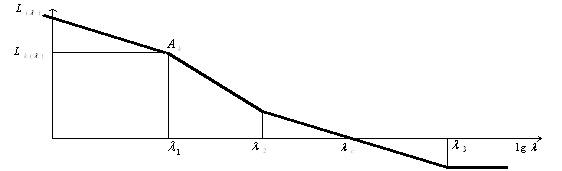
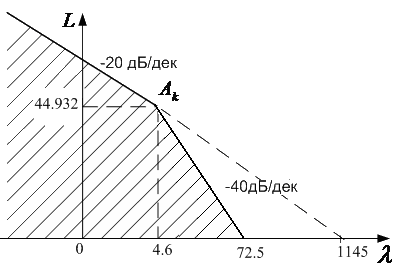
Типовая желаемая ЛАЧХ, по которой записана передаточная функция (2), показана на рис. 4.
Показатель степени k определяется наклоном заданной ЛАЧХ в области высоких частот.
Рис 4. Типовая ЛАЧХ желаемой следящей системы
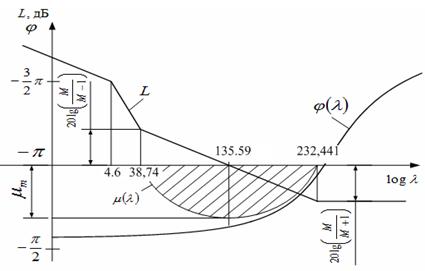
Для обеспечения заданных показателей качества переходного процесса скорректированная система должна обладать определенным запасом устойчивости по фазе. Необходимая величина запаса устойчивости по фазе (q) для заданной величины максимального перерегулирования указана в табл.1. После построения желаемой ЛАЧХ нужно рассчитать и построить ЛФЧХ скорректированной системы и определить q .
3.5.3. Расчет последовательного корректирующего звена
ЛАЧХ последовательного непрерывного корректирующего звена строится путем графического вычитания из ЛАЧХ желаемой ЛАЧХ заданной части системы ( на рис.3 - линия с-с-с...).
По виду ЛАЧХ нужно записать передаточную функцию непрерывного последовательного корректирующего звена. Для ЛАЧХ
с-с-с... на рис.3 передаточная функция имеет вид:
(2)
Коэффициент Ккор определяется из соотношения: 20lgКкор=L3 .
Эту же передаточную функцию можно получить, если передаточную функцию желаемую Кж(Р) поделить на передаточную функцию заданной части системы Кз(Р).
3.6. Моделирование следящей системы с непрерывным
последовательным корректирующим звеном
Для того, чтобы убедиться, что коррекция системы проведена правильно и скорректированная система имеет показатели качества переходного процесса не хуже заданных, нужно провести моделирование. Рекомендуется моделировать скорректированную систему на ПЭВМ, используя специализированные пакеты программ ДИСПАС или
Matlab simulink.
Похожие работы
... универсальный вольтметр В7-25. Он имеет диапазон измеряемых от 1 мкВ до 100 В, основную погрешность , , подавление помех на 70 дБ. Цифровые вольтметры переменного тока Как мы уже отмечали ранее, ЦВ встречаются в пределах каждого вида вольтметров, в том числе и предназначенных для измерения напряжений переменного и импульсного токов, видов ВЗ, В4 и В7. Таким образом, входной величиной АЦП в ...
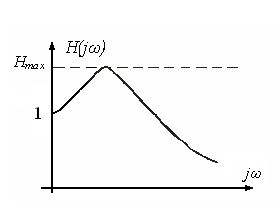
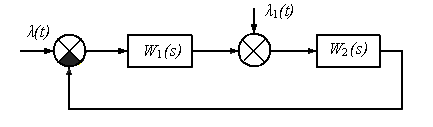
... звенья, у которых Н(0) = 1, показателем колебательности является абсолютный максимум АЧХ (рис.2): . Рекомендуемые значения показателя колебательности - 1,1…1.5. Анализ установившейся (динамической) ошибки Оценка показателей качества следящей системы производится при следующих типовых воздействиях: - линейное; - квадратичное; - полиномиальное. Линейное воздействие имеет место, в ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
0 комментариев