Навигация
4. Построение SDH Процессы загрузки/выгрузки цифрового потока.
Рассмотрим процессы, связанные с загрузкой и выгрузкой цифрового потока в транспортный модуль системы SDH (транспортный модуль STM-N). Процесс загрузки цифрового потока в транспортные модули представлен схематически на рис. 4.1.
Рис. 4.1.Процесс загрузки цифрового потока
в синхронные транспортные модули (STM-N)
В качестве примера рассмотрим процесс формирования синхронного транспортного модуля STM-1 из нагрузки потока Е1 (рис.4.2).
Рис.4.2.Формирование синхронного транспортного модуля STM-1 из нагрузки потока Е1.
Как видно из рисунка, в процессе формирования синхронного транспортного модуля к нагрузке сначала добавляются выравнивающие биты, а также фиксированные, управляющие и упаковывающие биты. Ниже более подробно остановимся на процессе выравнивания скорости нагрузки при формировании контейнера С-n (процессе стаффинга в системе SDH). К сформированному контейнеру С-12 добавляется заголовок маршрута VC-12 РОН (Path Overhead), в результате формируется виртуальный контейнер.
Добавление к виртуальному контейнеру 1 байта указателя (PTR) превращает первый в блок нагрузки (TU). Затем происходит процедура мультиплексирования блоков нагрузки в группы блоков нагрузки (TUG) различного уровня вплоть до формирования виртуального контейнера верхнего уровня VC-4. В результате присоединения заголовка маршрута VC-4 РОН образуется административный блок (AU), к которому подсоединяется секционный заголовок SОН (Section Overhead). Учитывая разделение маршрута на два типа секций (рис. 3.14), SОН состоит из заголовка регенераторной секции (RSOH) и заголовка мультиплексорной секции (MSOH). К структуре заголовка еще вернемся при рассмотрении форматов заголовков, где будут рассмотрены значения байтов SОН.
Как видно, процесс загрузки цифрового потока связан с использованием процессов выравнивания (битового стаффинга), активностью указателей, а также с использованием заголовков РОН и SOH. В этом разделе мы рассмотрим процессы выравнивания скорости загружаемого цифрового потока и их влияние на параметры цифровой нагрузки.
Известно, размер контейнера в системе передачи SDH стандартизирован. Его размер несколько больше размера, необходимого для загрузки потока PDH соответствующего уровня иерархии с учетом максимально допустимой вариации скорости загружаемого потока. При загрузке цифрового потока производится процедура выравнивания его скорости методом битового стаффинга, для этого используется часть контейнера.
<LH>Различают два тида битового стаффинга:</LH>
<div align=justify>плавающее выравнивание предусматривает не только компенсацию разницы в скоростях загружаемых цифровых потоков, но и ее вариацию. В этом случае полезная нагрузка в контейнере может гибко увеличиваться и уменьшаться, давая возможность грузки в контейнер потока с вариацией скорости. Для обеспечения плавающего выравнивания в нескольких частях контейнера предусматриваются поля переменного стаффинга. Периодически повторяемые индикаторы стаффинга определяют, является ли бит в поле переменного стаффинга информационным или битом выравнивания и подлежит уничтожению в процессе выгрузки;</div> <div align=justify>фиксированное выравнивание предусматривает добавление в состав контейнера дополнительных битов для того, чтобы его размер соответствовал стандартному. В отличие от процесса плавающего выравнивания, где стаффинговые биты идентифицируются индикаторами, в процессе фиксированного выравнивания индикаторы не используются. Место расположения стаффингового поля определено структурой контейнера.</div>В процессе загрузки и выгрузки цифрового потока в синхронный транспортный модуль обычно используются оба вида выравнивания.
В качестве примера рассмотрим загрузку потока 140 Мбит/с в транспортный модуль STM-1 (рис. 4.3).
Рис. 4.3. Загрузка потока 140 Мбит/с в
синхронный транспортный модуль
Как видно из рисунка, в процессе загрузки потока 140 Мбит/с в синхронный транспортный модуль используются процедуры фиксированного выравнивания (биты R) и плавающего выравнивания (биты S, индикаторы С). Процедура фиксированного стаффинга используется чаще и связана с полями X, Y и Z. Процедура плавающего выравнивания связана с использованием полей Х и Z, причем непосредственно стаффинговые биты плавающего выравнивания передаются в поле Z. Поле Х содержит индикатор стаффинга, передаваемый периодически (до появления поля Z индикатор передается 5 раз).
Процедура выравнивает вариацию скорости. Допустимые значения вариации скорости загружаемых потоков иерархии PDH представлены в табл. 4.1.
| Скорость цифрового | Максимально допустимая | Скорость цифрового потока | Название |
| 1,5444 | 50 | 1,600 | C-11 |
| 2,048 | 50 | 2,176 | C- 12 |
| 6,312 | 30 | 6,784 | C- 2 |
| 34,368 | 20 | 48,384 | C- 3 |
| 44,736 | 20 | 48,384 | C- 3 |
| 139,260 | 15 | 149,760 | C- 4 |
Таблица 4.1. Допустимые значения вариации скорости загружаемого
потока и оазличные типы контейнеоов
В качестве второго примера рассмотрим загрузку потока 34 Мбит/с (ЕЗ), представленную на рис. 4.4.
Рис. 4.4.Загрузка потока E3 (34 Мбит/с).
Как следует из рисунка, загрузка потока ЕЗ в трибутарную группу TUG-3 во многом аналогична загрузке потока Е4, представленной на рис.4.2. И в том, и в другом случае используются виртуальные контейнеры высокого уровня - VC-3 и VC-4 соответственно. В обоих случаях используется процедура стаф-финга, причем как фиксированного (биты R), так и плавающего или переменного (биты S). Для идентификации битов переменного стаффинга используются индикаторы стаффинга (биты С). Существенно, что на рис. 4.3 помимо процедуры стаффинга представлена также структура заголовков, в частности заголовок маршрута высокого уровня VC-3 РОН. Ниже рассмотрены основные информационные поля, входящие в этот заголовок.
В качестве примера виртуального контейнера низкого уровня рассмотрим асинхронную загрузку потока 2 Мбит/с - наиболее часто используемый вариант загрузки цифрового потока (рис.4.5). На рис.4.5 представлена побайтовая структура загруженного в синхронный транспортный модуль потока головка РОН (V5, J2, N2 и К4). Как видно пользуются процедуры фиксированного и плавающего выравнивания.
Рис. 4.5.Асинхронная загрузка потока 2 Мбит/с в синхронный транспортный модуль.
Процедуры мультиплексирования внутри иерархии SDH.
Наиболее важными потоками иерархии SDH являются потоки STM-1, STM-4 и STM-16. Рассмотрим процедуры мультиплексирования между этими уровнями, схематически представленные на рис.4.6.
Рис. 4.6.Синхронное мультиплексирование внутри иерархии SDH.
Как следует из рисунка, внутри иерархии SDH мультиплексирование выполняется синхронно, без процедуры выравнивания скоростей. В результате обеспечивается основное преимущество концепции SDH как технологии построения цифровой первичной сети - возможность загрузки и выгрузки потоков любого уровня иерархии PDH из любого потока иерархии SDH вне зависимости от скорости передачи.
Для удобства реализации синхронного мультиплексирования с использованием современных логических устройств, мультиплексирование выполняется байт-синхронно в отличие от бит-ориентированных процедур, используемых в иерархии PDH. В результате использования байт-ориентированных процедур мультиплексирования значительно повышается производительность процессоров, в результате достигается высокая скорость передачи в первичной сети.
Использование в концепции SDH байт-синхронного мультиплексирования позволило также увязать динамику развития пропускной способности в цифровых системах передачи с динамикой развития производительности современных процессоров, что было важно, поскольку на этапе технологии PDH наметилось некоторое отставание.
Рассмотрим теперь структуру заголовка маршрута и секционного заголовка и те информационные поля, которые входят в их состав.
Структура заголовка POH.Заголовок маршрута РОН выполняет функции контроля параметров качества передачи контейнера. Он сопровождает контейнер по маршруту следования от точки формирования до точки расформирования. Структура и размер заголовка РОН определяются типом соответствующего контейнера. Следовательно, различаются два основных типа заголовков:
--- заголовок маршрута высокого уровня (High-order РОН - НО-РОН), используемый для контейнеров VC-4/VC-3;
--- заголовок маршрута низкого уровня (Low-order РОН - LO-POH), используемый для контейнеров VC-3/VC-2/VC-1.
Рассмотрим подробно структуру заголовка маршрута высокого уровня. Структура заголовка НО-РОН представлена на табл.4.2.
| J1 | Индикатор маршрута |
| B3 | Мониторинг качества (код BIP-8) |
| C2 | Указатель типа полезной нагрузки |
| G1 | Подтверждение ошибок передачи |
| F2 | Сигналы обслуживания |
| H4 | Индикатор сверхцикла |
| F3 | Автоматическое переключение |
| K3 | Подтверждение ошибок передачи |
| N1 | Мониторинг взаимного соединения (ТСМ) |
Тавлица 4.2.Структура заголовка HO - POH.
Поле идентификатора маршрута (J1) передается в 16-ти последовательных циклах и состоит из 15-байтовой последовательности идентификаторов маршрута и 1 байта суммы CRC-7 для идентификации ошибок в трассе маршрута. Идентификаторы маршрута представляют собой последовательность ASCII-символов в формате, соответствующем ITU-T E.164, и используются для того, чтобы принимаемый терминал получал подтверждение о связи с определенным передатчиком (идентификация точки доступа к маршруту). Структура J1 схематически представлена на табл.4.3.
| Байты J1, номера битов | |||||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||||||||
| 1 | C | C | C | C | C | C | C | Байт 1 | |||||||
| ССССССС - контрольная сумма CRC-7 | |||||||||||||||
Таблица 4.3.Структура информационного поля J1 с цикловой структурой.
Рассмотрим основные информационные поля в составе НО-РОН.
Байт BЗ используется для контроля четности (процедура ВIР - 8). Более подробно об этом будет сказано ниже.
Указатель типа полезной нагрузки С2 определяет тип полезной нагрузки, передаваемой в контейнере. Основные типы полезной нагрузки определены в ITU-T G.707, кроме того, ITU-T определил несколько дополнительных рекомендаций, связанных с передачей в системе SDH нагрузки ATM и FDDI). Значения байта С2 и соответствующие типы нагрузки приведены в табл.4.4.
| Бинарный вид | HEX | Значение |
| 00000000 | 00 | контейнер не загружен |
Таблица 4.4.Значения указателя типа полезной нагрузки.
Байт G1 служит для передачи сигналов подтверждения ошибок передачи, обнаруженных в конце маршрута. Предусмотрено использование байта G1 для передачи данных об ошибках двух категорий (рис.4.7.)
FEBE (Far End Block Error) - наличие блоковой ошибки на удаленном конце; сигнал, посылаемый в ответ на получение на удаленном конце ошибки четности по BIP-8;
FERF (Far End Receive Failure) -наличие неисправности на удаленном конце; сигнал, посылаемый в случае возникновения на удаленном конце нескольких неисправностей.
Рис. 4.7.Значения байта G1.
Байты F2 и F3 используются оператором для решения внутренних задач обслуживания системы передачи и образуют выделенный служебный канал.
Байт Н4 является указателем и используется при организации сверхциклов SDH, например, он указывает на номер цикла VC-1, VC-2 в сверхцикле TU-1, TU-2. Этот байт также используется в процедуре смещения указателей, что будет описано ниже.
Индикатор автоматического переключения (Automatic Protection Switching - APS) КЗ используется для оперативного резервирования в системе SDH. Индикатор обеспечивает передачу команды перехода на резерв даже в случае отсутствия системы самодиагностики SDH. Более подробно механизмы резервного переключения рассмотрены в разделе, посвященном процедурам резервного переключения.
Байт мониторинга взаимного соединения (Tandem Connection Monitoring - ТСМ) N1 был впервые определен в 1996 г. в рекомендациях ITU-T. Необходимость введения процедуры ТСМ была связана с тем, что байт ВЗ, обеспечивающий контроль четности, устанавливается только для начала и конца маршрута и обеспечивает контроль качества сквозного соединения. В случае, если маршрут проходит через несколько секций, принадлежащим различным операторам, требуется не только сквозной, но и посекционный мониторинг параметров качества. До последнего времени средства секционного мониторинга не обеспечивали этих функций, поэтому была введена дополнительная процедура - ТСМ. Согласно этой процедуре сетевой узел обеспечивает контроль четно- сти по НО-РОН и LO-POH (контроль BIP-N), а затем передает информацию об ошибках предыдущему узлу в байте N1 (для заголовков высокого уровня) или N2 для заголовков низкого уровня.
Рассмотрим более подробно состав заголовка SOH (рис.4.8).
Рис. 4.8.Структура заголовка SOH.
Как видно из рисунка, информация о цикловой синхронизации (А1, А2) повторяется три раза, что связано с объединением стандартов SDH и SONET.
Байты D1-D12 создают канал передачи данных, который может использоваться встроенными системами самодиагностики и системами TMN. Например, использование служебного канала передачи данных, образованного байтами D, позволяет выполнять реконфигурирование сети из единого центра.
Трасса регенераторной секции выполняет те же функции, что и байт J1 в заголовке РОН.
Важным для проведения тестирования систем SDH является служебный канал F1, в котором передается информация о результатах контроля четности и обнаружения ошибок. В состав байта F1 входят идентификаторы регенераторов RI и информационные биты S, где передается информация об ошибках (рис.4.9).
Байты К1 и К2 заголовка ЗОН также имеют большую важность при анализе работы системы SDH. Эти байты обеспечивают резервное переключение и оперативную реконфигурацию сети. В настоящее время получила широкое распространение концепция самозалечивающихся сетей, механизм действия которых связан с оперативной реконфигурацией и переходом на резервный ресурс. Именно эти процедуры обеспечиваются байтами К1 и К2. Поэтому их анализ обеспечивает тестирование работоспособности процессов резервирования.
Рис.4.9.Структура канала управления F1.
Байт S1 определяет параметр качества источника синхронизации узла генерации транспортного модуля. Информация о параметре качества источника синхронизации передается комбинацией битов 5-8 в составе байта S1. Возможные значения параметров качества источника синхронизации приведены в табл.4.5. Передача информации о качестве источника синхронизации позволяет избежать проблем, связанных с нарушениями в структуре системы синхронизации. Учитывая, что система передачи на основе SDH использует принципы синхронной передачи и мультиплексирования, параметры синхронизации в SDH чрезвычайно важны. С увеличением разветвленности сети, использованием концепций резервирования и самозалечивающихся сетей, повышается вероятность возникновения проблем, связанных с системой синхронизации. Так, например, в процессе реконфигурации или гибкого переключения на резерв, система синхронизации должна также реконфигурироваться. Передача информации о качестве источника синхронизации конкретного узла дает возможность авторегулирования процессов в системе синхронизации, например, сигнал от источника плохого качества не используется для распределения по сети и синхронизации от него других узлов.
| Параметр | Приоритет при использовании | Значение параметра |
| 0010 | Наиболее высокий | G.811 первичный источник синхронизации (PRC) |
| 0100 | G.812 вторичный источник синхронизации транзитного узла | |
| 1000 | G.812 вторичный источник синхронизации оконечного узла | |
| 1011 | Источник синхронизации цифрового оборудования | |
| 1111 | Наиболее низкий | Не использовать для внешней синхронизации. |
| 0000 | Качество не определено |
Таблица 4.5.Возможные значения параметра источника синхронизации.
Назначение указателей.
Указатели выполняют в технологии SDH две основные функции:
• обеспечение быстрого поиска и доступа к нагрузке;
• обеспечение процедур выравнивания и компенсации рассинхронизации передаваемых потоков.
Первая функция указателей является наиболее важной, поскольку именно с ней связано основное преимущество технологии SDH - отсутствие необходимости пошагового мультиплексирования/ демультиплексирования. Указатели административных блоков AD PTR и блоков нагрузки TU PTR обеспечивают прямой доступ к загруженному в синхронный транспортный модуль потоку на любом уровне (рис.4.10). Как видно из рис.4.10, в системах передачи SDH используются два типа указателей - административной (AU-PRT) и трибутарной групп (TU-PTR). Указатели образуются байтами Н, описанными в предыдущем разделе.
Рис.4.10.Механизм организации прямого доступа к нагрузке.
Механизм формирования указателей - обратный к механизму поиска нагрузки, представленной на рис.4.10. Схематически его можно представить рис.4.11.
Рис.4.11.Структура присвоения/поиска, формирование сигнала SDH.
В системе SDH используется метод контроля параметров ошибки без отключения канала, который получил название метода контроля четности (Bit Interleaved Parity - В1Р). Этот метод, также как и CRC, является оценочным, но он дает хорошие результаты при анализе систем передачи SDH. Алгоритм контроля четности достаточно прост (рис.5.1). Контроль четности выполняется для конкретного блока данных цикла в пределах групп данных по 2, 8 и 24 бита (BIP-2, BIP-8 и В1Р-24 соответственно). Эти группы данных организуются в столбцы, затем для каждого столбца рассчитывается его четность, т.е. четное или нечетное количество единиц в столбце. Результат подсчета передается в виде кодового слова на приемную сторону. На приемной стороне делается аналогичный расчет, сравнивается с результатом и делается вывод о количестве ошибок четности. Результат сравнения передается в направлении, обратном передаче потока.
Рис.5.1.Алгоритм контроля чётности.
Метод контроля четности является оценочным, поскольку несколько ошибок могут компенс ровать друг друга в смысле контроля четности, однако этот метод дает приемлемый уровень оценки качества цифровой системы передачи. Поскольку технология SDH предусматривает создание секционных заголовков и заголовк пути, метод контроля четности дает возможность тестирования параметров цифровой системы передачи от секции к секции и от начала до конца маршрута. Для этого используются специальные байты (см. выше) в составе заголовков SОН и РОН. Например, количество ошибок, обнаруженно в канале В3 передается в байте G1 РОН VC-4 следующего цикла. На рис.5.2 представлена cxема посекционного мониторинга параметра ошибки BIP. Используемые для контроля четности байты связанные с ними участки цифровой системы передачи приведены в табл.5.1.
Рис.5.2.Посекционный мониторинг параметров цифровой передачи.
| Байт | Заголовок | Длина | Секция мониторинга |
| B1 | RSOH | BIP - 8 | STM - 1 |
| B2 | MSOH | BIP - 24 | STM - 1 без RSOH |
| B3 | POH VC - 3/4 | BIP - 8 | VC - 3/4 |
| V5 | POH VC - 1/2 | BIP - 2 | VC - 1/2 |
Таблица 5.1.Байты, используемыедля контроля чётности и участки SDH.
6. Резервирование
К современной цифровой первичной сети предъявляются повышенные требования в части параметров ее надежности. В связи с этим современные первичные сети строятся с использованием резервных трактов и коммутаторов, выполняющих оперативное переключение в случае неисправности на одном из каналов. В этом случае в состав системы передачи включаются цепи резервирования мультиплексорной секции (Multiplex Section Protection - MSP). Как было показано выше, в сети SDH осуществляется постоянный мониторинг параметров ошибки (процедура контроля четности BIP) и параметров связности. В случае значительного ухудшения качества передачи в мультиплексорной секции выполняется оперативное переключение (APS) на резервную мультиплексорную секцию. Это переключение выполняется коммутаторами. По типу резервирования различаются коммутаторы APS с архитектурой 1+1 и 1:n (рис.6.1).
Для управления резервным переключением используются байты К1 и К2 секционного заголовка. В байте К1 передается запрос на резервное переключение и статус удаленного конца тракта. В байте К2 передается информация о параметрах моста, используемого в APS с архитектурой 1:n, данные по архитектуре MSP и сообщения о неисправностях, связанные с APS. Различные варианты архитектуры MSP используются в различных схемах резервирования. Наибольшее распространение имеют две схемы, непосредственно связанные с кольцевой топологией сетей SDH -схема "горячего резервирования" (рис.6.2а) и схема распределенной нагрузки (рис.6.2b). В первом случае трафик передается как в прямом, так и в резервном направлении. В случае повреждения происходит реконфигурация и создается резервный канал. В схеме распределенной нагрузки половина графика передается в прямом, половина - в обратном направлении. В этом случае при возникновении неисправности происходит переключение на уровне ресурсов.
Согласно ITU-T G.841 время резервного переключения не должно превышать 50 мс.
Рис.6.1.Архитектура MSP.
Рис.6.2.Схемы резервирования в системах SDH.
1.И.Г.Бакланов "Технологии измерений первичной сети. Часть 1. Системы Е1,PDH, SDH."; ЭКО-ТРЕНДЗ, 2000
2.Н.Н.Слепов "Синхронные цифровые сети SDH."; ЭКО-ТРЕНДЗ, 1999
Похожие работы
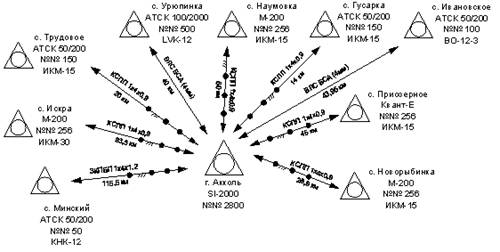
... и емкости с организацией ЦТЭ всего оборудования системы "Квант". Данным проектом предлагается модернизация телефонной сети с. Урюпинка Аккольского района Акмолинской области. Планируемая модернизация телефонной сети с. Урюпинка Аккольского района Акмолинской области создает предпосылки стабильного роста междугородного и международного трафика, предоставления высокоскоростных услуг передачи ...
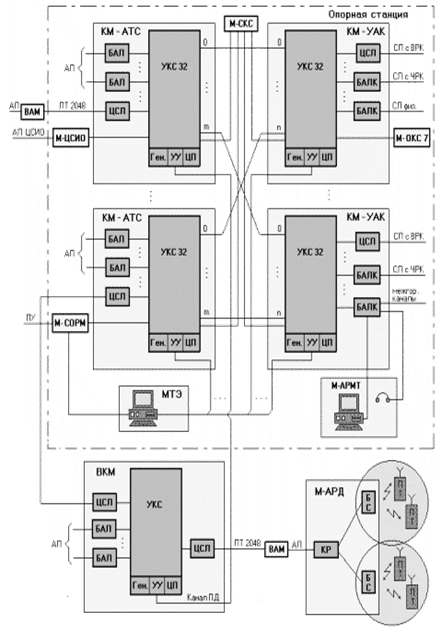
... . Требования к сельским коммутационным станциям : Требования, предъявляемые к используемому для модернизации сельских районов коммутационному оборудованию, в значительной степени обусловлены не только географическими особенностями и исторически сложившейся структурой сельских телефонных сетей (СТС), но и принятыми алгоритмами обслуживания вызовов для обеспечения приоритета междугородных ...
... телекоммуникаций играет важную роль - настройка и оптимизация сетей связи, поиск неисправностей и причин конфликтов, разрешение конфликтных ситуаций. Таким образом, основной движущей силой развития измерительных технологий является усложнение современных систем связи. Распространенное мнение о том, что цифровые системы связи лучше, надежнее и поэтому требуют в меньшей степени обслуживания на ...
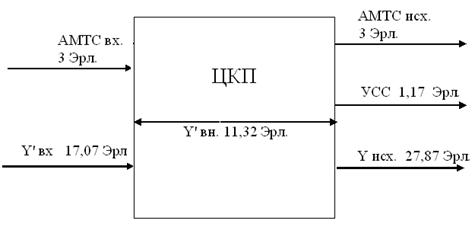
... АТС, а интенсивность между ними уменьшается – это приводит к сохранению принципа связи РАТС («каждая с каждой»), к увеличению числа пучков на сети и к уменьшению их емкости. 1. Характеристика ГТС Городская телефонная сеть – это совокупность станционных и линейных сооружений, а также оконечных абонентских устройств (ТА) предназначенных для обеспечения телефонной связи абонентов города. ...
0 комментариев