Классификация буровых скважин
Основные технико-технологические понятия процесса
Сущность и разновидности глубокого вращательного бурения
Характеристики процесса бурения как объекта автоматизированного управления
Основные источники эффективности разработки и внедрения систем автоматизированного управления процессом бурения
Состояние разработок по автоматизации процесса бурения
Описание автоматизированной системы управления процессом бурения Зоя 1.1
Описание работы схемы
Расчет производительности
Навигация
Описание автоматизированной системы управления процессом бурения Зоя 1.1
Автоматизация процесса бурения
81174
знака
7
таблиц
7
изображений
4.1 Описание автоматизированной системы управления процессом бурения Зоя 1.1.
Система Зоя 1.1 предназначена для контроля технологических параметров бурения с целью оперативного управления и оптимизации режимов бурения скважин на нефть и газ и обеспечивает:
· автоматический сбор и обработку с расчетом производных параметров и представление текущей информации в наглядной форме на средствах отображения и регистрации бурильщика и бурового мастера;
· документирование результатов бурения в цифро-аналоговом и графическом виде, включая рапорт за смену,
· контроль выхода технологических параметров за установленные пользователем пределы со световой и звуковой сигнализацией этих событий;
· аварийную сигнализацию при выходе параметров "Вес на крюке", "Давление на входе" за предельные значения с выдачей сигналов блокировки на соответствующее буровое оборудование;
· автономное функционирование пульта бурильщика при отключении ЭВМ;
· высокую эксплуатационную надежность и долговечность при минимальных затратах на техническое обслуживание и метрологическое обеспечение.
К необходимому типовому элементу любой системы автоматического управления относятся датчики технологических параметров. Назначение датчика - преобразование контролируемой или регулируемой величины в величину другого рода, удобную для дальнейшего применения.
В системе присутствуют следующие датчики:
· Датчик веса на крюке устанавливается на неподвижной ветви талевого каната. В качестве первичного преобразователя в датчике используется тензометрический силоизмерительный элемент.
· Датчик контроля момента на роторе (тензометрический) устанавливается на редукторе привода ротора вместо фиксирующей серьги-стяжки или фиксирующей опоры. Контролируется действующее на датчик усилие растяжения или сжатия.
· Датчик контроля ходов насоса (индуктивный датчик приближения) устанавливается на шкиве привода насоса.
· Датчик канала контроля скорости вращения ротора определяет скорость вращения вала привода ротора. В качестве первичного преобразователя применяется датчик приближения. Устанавливается на трансмиссии.
· Датчик давления (тензорезисторный) устанавливается в нагнетательной линии.
· Датчик глубин дает исходную информацию для расчета глубины забоя, подачи, положения тальблока. Датчик цепной передачей связан с валом лебедки.
· Датчик-индикатор изменения расхода бурового раствора на выходе (в желобе) преобразует угол отклонения лопатки от вертикального положения в электрический сигнал в зависимости от уровня и скорости потока.
· В совмещенном датчике плотности - уровня бурового раствора (БР) и плотности БР на выходе в качестве первичного преобразователя применяется дифференциальный манометр. Измеряется гидростатическое давление в погруженных в буровой раствор трубках, через которые под давлением продувается воздух.
· Датчик суммарного содержания горючих газов, выполненный на основе первичного термохимического преобразователя, монтируется вместе с датчиком-индикатором изменения расхода на выходе. Аналогичные датчики применяются для контроля газосодержания и сигнализации во взрывоопасной зоне.
· Датчик температуры БР на входе и выходе выполнен на основе специальной микросхемы и устанавливается, соответственно, в рабочей емкости и в желобе.
· Датчик температуры воздуха (аналогичный) размещен в кабельной распределительной коробке.
· Датчик момента на ключе (тензометрический) устанавливается на приводном тросе ключа.
· Датчик момента на турбобуре (тензометрический) устанавливается на узел стопора ротора.
Информация от датчиков по кабелям передается в блок УКП, где осуществляется преобразование и обработка сигналов, и, затем, в пуль бурильщика и ЭВМ.
Информационно-метрологические характеристики в полном объеме приведены в прилагаемой таблице №.
Таблица №.
| Контролируемый параметр | ||
| Наименование параметра, единица измерения | Диапазон контроля | |
| 1 Вес на крюке, кН | 0 - 5000; 0 - 4000 0 - 3000; 0 - 2500 0 - 2000; 0-1500 | |
| 2 Нагрузка на долото, кН | 0-500 | |
| 3. Крутящий момент на роторе, кНм | 0-60 0-30 | |
| 4. Давление на входе, Мпа | 0-40 | |
| 5 Расход на входе, л/с | 0-100 | |
| 6 Обороты ротора, об/мин | 0-300 | |
| 7 Число ходов каждого насоса (до трех), ход/мин | 0-125 | |
| 8 Изменение расхода на выходе, % | 0-99 | |
| 9. Подача, м | 0-99,9 | |
| 10. Положение талевого блока, м | 0-60 0-45 | |
| 11 Глубина забоя, м | 0 -9999 | |
| 12 Положение долота над забоем, м | 0 - 9999 | |
| 13 Текущее время, дата | - | |
| 14. Время бурения 1 м проходки, мин/м | 0-1000 | |
| 15. Механическая скорость проходки, м/час | 0-200 | |
| 16. Скорость СПО, м/с | 0-3 | |
| 17. Время бурения долотом, мин | 0-999999 | |
| 18. Проходка на долото, м | 0-999 | |
| 19. Плотность бурового раствора (БР),г/смЗ | 0,8-2,6 | |
| 20. Уровень БР, м | 0,4-2,0; 0,8-2,4 1,2-2,8 | |
| 21 Суммарный объем БР,мЗ | 0 - 999,9 | |
| 22. Изменение суммарного объема БР, мЗ | 0-500 | |
| 23 Суммарное содержание горючих газов, % НКПР | 0-50 | |
| 24. Момент на ключе, кНм | 0-60 | |
| 25. Момент турбобура, кНм | 0-30 | |
| 26 Температура на входе и выходе,°С | 0-100 | |
| 27 Температура воздуха,°С | 0-100 | |
| 28. Плотность промывочной жидкости в желобе, г/смЗ | 0,8-2,6 | |
4.2 Место УСО в АСУ процесса бурения
АСУ ТП должна иметь возможность и средства связи с объектом управления. Однако из главных различий между системами обработки данных и АСУ ТП состоит в том, что последняя должна быть способна в реальном времени получать информацию о состоянии объекта управления, реагировать на эту информацию и осуществлять автоматическое управление ходом технологического процесса. Для решения этих задач ЭВМ, на базе которой строится АСУ ТП, должна относиться к классу управляющих вычислительных машин (УВС), т. е. представлять собой управляющий вычислительный комплекс (УВК) УВК можно определить как вычислительную машину, ориентированную на автоматический прием и обработку информации, поступающей в процессе управления, и выдачу управляющих воздействий непосредственно на исполнительные органы технологического оборудования. Такая ориентация обеспечивается устройствами связи с объектом (УСО) (рис. ммм) - набором специализированных блоков для информационного обмена между управляющей ЭВМ и объектом управления. Различают пассивные и активные УСО.
Пассивные устройства выполняют команды опроса датчиков и команды выдачи управляющих воздействий. Они содержат комплекты входных и выходных блоков и блок управления. В состав входных и выходных блоков, обеспечивающих прием аналоговой и дискретной информации, входят преобразователи формы информации типа аналог-код и код-аналог, коммутаторы, усилители и т. п. Блок управления обеспечивает необходимый обмен информацией с управляющей ЭВМ и управление всеми блоками устройства, расшифровывает команды, поступающие от ЭВМ, и обеспечивает необходимый обмен информацией через блоки ввода-вывода
Активные УСО способны работать в автономном режиме слежения за состоянием управляемого объекта (процесса), а также выполняют определенные алгоритмы преобразования информации, например, алгоритмы регистрации параметров и сигнализации об отклонении их от нормы, регулирования по одному из относительно простых законов и др. Построение УСО по активному принципу позволяет повысить надежность АСУ ТП в целом и эффективность использования управляющей вычислительной машины в результате сокращения потока информации, поступающей от объекта управления в управляющую ЭВМ.
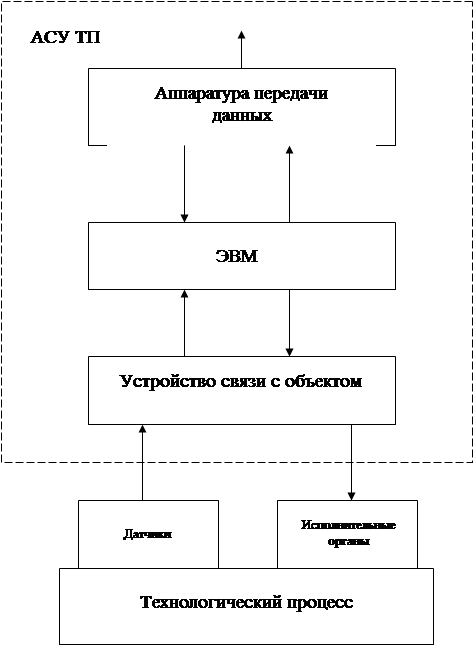
Рис. Типовая структура АСУ ТП на базе управляющей ЭВМ.
В настоящем дипломе разрабатывается конструкция функционально законченного устройства связи с объектом в системе сбора и первичной обработки информации о состоянии процесса бурения (рис.ццц). Система сбора и первичной обработки информации о состоянии процесса бурения является важнейшей функциональной подсистемой АСУ ТП ЗОЯ.
В основном схема разработана на интегральных микросхемах ТТЛ серии К555 и К155. Данная модель является практичной, недорогой и простой и позволяет связать датчик любого типа с IBM PC или эквивалентным компьютером. Подробно рассматриваются принципы функционирования системной шины IBM PC и базовый аппаратный интерфейс, с которым связана вышеуказанная конструкция, а также работа системы прерываний, счетчиков и таймеров.
Похожие работы
... диагностика бурового станка, регистрация и индикация параметров режимов бурения и некоторых режимов работы. Оптимизацию процесса бурения намечено осуществить путем адаптивного регулирования с помощью вычислительных устройств. В обзоре, посвященном анализу состояния разведочного бурения и направления его развития, зарубежные специалисты утверждают, что дальнейшее развитие этого способа, вероятно, ...
... работы. Кроме того, за счет повышения скоростей бурения возможно сокращение количества буровых установок, а следовательно, и численности рабочих. Снижение себестоимости 1 м бурения скважины - следующий источник эффективности систем автоматизированного управления процессом бурения. Это достигается с одной стороны, за счет роста производительности труда, а с другой - за счет меньших удельных ...
... период времени. Ручное управление даже двумя-тремя параметрами процесса бурения на оптимальном уровне в условиях частоперемежающихся пород и глубокой скважины вряд ли возможно. Автоматизированное управление процессом бурения позволяет успешно изменять практически одновременно два-три параметра с недоступной человеку частотой. Следовательно, источником эффективности автоматизированного управления ...
Применение модулей геофизических исследований скважин и методика обработки данных в процессе бурения
... К ним относятся: измерение механической скорости бурения, веса на крюке, расхода промывочной жидкости и давления на стояке, газовый и люминесцентный и др. каротаж. Данные геофизических исследований, полученные в процессе бурения могут служить в большинстве скважин надежным критерием интерпретации результатов с целью дальнейшего планирования работ на скважине (опробования объектов, отбора керна и ...
0 комментариев