Навигация
Расчет оптимальных настроек ПИ - регулятора
60550
знаков
6
таблиц
4
изображения
2. Расчет оптимальных настроек ПИ - регулятора.
Передаточная функция объекта, рассчитанная ранее, имеет вид:
K об
![]() W об (p) = .
W об (p) = .
0,024 * p3 + 0,189 * p2 + 0,681 * p + 1
Необходимая для расчета частотная функция объекта в показательной форме записи:
w(0,68-0,024w2)
![]() 1,41 -j arctg
1,41 -j arctg
![]()
![]()
![]() W об (jw) =
e 1 - 0,189w2
W об (jw) =
e 1 - 0,189w2
![]() (1-0,189w2)2+w2(0,681-0,024w2)2
(1-0,189w2)2+w2(0,681-0,024w2)2
Придавая частоте w приращение для построения АФХ находят соответствующие значения для:
1,41
![]()
![]() A об (w) = ;
A об (w) = ;
![]()
![]() (1-0,189w2)2+w2(0,681-0,024w2)2
(1-0,189w2)2+w2(0,681-0,024w2)2
w(0,681-0,024w2)
![]() j об (w) = - arctg ;
j об (w) = - arctg ;
1 - 0,1887w2
и результаты расчетов сводятся в табл. 2.
2.I. Расчет регуляторов на заданное значение показателя колебательности.
Настройки регуляторов можно рассчитать графоаналитическим способом по АФХ объекта на заданное значение показателя колебательности М. Метод основан на том факте, что АФХ разомкнутой системы управления W (jw) = W об (jw) * W рег (jw) должна касаться на комплексной плоскости окружности с заданным индексом М. Радиус окружности r = M / ( M2 - 1 ), а ее центр лежит на отрицательной вещественной полуоси и отстоит от начала координат на расстояние R = M2 /(M2- 1 ).
Графический расчет (рис. 2) начинают с построения на комплексной плоскости АФХ объекта (см. табл. 2). Затем строят АФХ разомкнутой системы при К рег = I и различных значениях времени изодрома : Т и1 = 0,3 с; Т и2 =0,5 с; Т и3 = 0,7 с; Т и4 = 0,9 с. Для этого к каждому вектору АФХ объекта прибавляется вектор с модулем DА = А об / Т и w (табл. 3), повернутый на угол 90о по часовой стрелке.
Из начала координат проводят луч под углом :
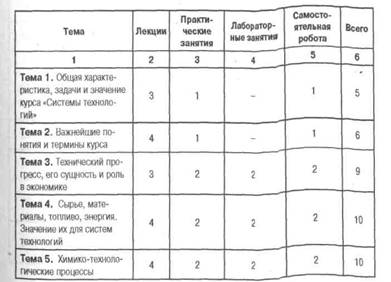
Таблица № 2. Расчет амплитудно-фазовой характеристики.
| w, рад / c | A об (w), оС /% хода | j об (w), град. | Re (АФХ) | Im (АФХ) |
| 0,0000 | 1,4100 | 0,0 | 1,4100 | 0,0000 |
| 0,1500 | 1,4086 | -5,8 | 1,4013 | - 0,1435 |
| 0,3000 | 1,4046 | -11,7 | 1,3754 | - 0,2847 |
| 0,4500 | 1,3978 | -17,5 | 1,3328 | - 0,4213 |
| 0,6000 | 1,3885 | - 23,4 | 1,2744 | - 0,5512 |
| 0,7500 | 1,3765 | - 29,2 | 1,2012 | - 0,6723 |
| 0,9000 | 1,3620 | - 35,1 | 1,1145 | - 0,7828 |
| 1,0500 | 1,3450 | - 40,9 | 1,0161 | - 0,8813 |
| 1,2000 | 1,3256 | - 46,8 | 0,9075 | - 0,9662 |
| 1,3500 | 1,3036 | - 52,7 | 0,7908 | - 1,0364 |
| 1,5000 | 1,2792 | - 58,5 | 0,6678 | - 1,0911 |
| 1,6500 | 1,2523 | - 64,4 | 0,5409 | - 1,1295 |
| 1,8000 | 1,2229 | - 70,3 | 0,4122 | - 1,1514 |
| 1,9500 | 1,1909 | - 76,2 | 0,2841 | - 1,1565 |
| 2,1000 | 1,1564 | - 82,1 | 0,1592 | - 1,1454 |
| 2,2500 | 1,1193 | - 88,0 | 0,0397 | - 1,1186 |
| 2,4000 | 1,0799 | - 93,8 | - 0,0719 | - 1,0775 |
| 2,5500 | 1,0382 | - 99,6 | - 0,1736 | - 1,0236 |
| 2,7000 | 0,9946 | - 105,4 | - 0,2636 | - 0,9591 |
| 2,8500 | 0,9495 | - 111,0 | - 0,3406 | - 0,8863 |
| 3,0000 | 0,9032 | - 116,6 | - 0,4040 | - 0,8078 |
| 3,1500 | 0,8563 | - 122,0 | - 0,4537 | - 0,7262 |
| 3,3000 | 0,8092 | - 127,3 | - 0,4899 | - 0,6440 |
| 3,4500 | 0,7625 | - 132,4 | - 0,5138 | - 0,5634 |
| 3,6000 | 0,7166 | - 137,3 | - 0,5265 | - 0,4862 |
| 3,7500 | 0,6720 | - 142,0 | - 0,5296 | - 0,4136 |
| 3,9000 | 0,6290 | - 146,5 | - 0,5247 | - 0,3468 |
| 4,0500 | 0,5878 | - 150,9 | - 0,5133 | - 0,2863 |
| 4,2000 | 0,5486 | - 155,0 | - 0,4971 | - 0,2321 |
| 4,3500 | 0,5117 | - 158,9 | - 0,4773 | - 0,1843 |
| 4,5000 | 0,4769 | - 162,6 | - 0,4551 | - 0,1427 |
| 4,6500 | 0,4444 | - 166,1 | - 0,4314 | - 0,1066 |
| 4,8000 | 0,4141 | - 169,5 | - 0,4071 | - 0,0758 |
| 4,9500 | 0,3859 | - 172,6 | - 0,3827 | - 0,0496 |
| 5,1000 | 0,3597 | - 175,6 | - 0,3587 | - 0,0276 |
| 5,2500 | 0,3355 | - 178,4 | - 0,3354 | - 0,0091 |
| 5,4000 | 0,3131 | - 181,1 | - 0,3130 | 0,0062 |
| 5,5500 | 0,2924 | - 183,7 | - 0,2918 | 0,0187 |
| 5,7000 | 0,2733 | - 186,1 | - 0,2717 | 0,0290 |
| 5,8500 | 0,2556 | - 188,4 | - 0,2529 | 0,0372 |
| 6,0000 | 0,2393 | - 190,6 | - 0,2352 | 0,0438 |
b=arcsin (1/M)=arcsin (0,77) = 50,5o к отрицательной вещественной полуоси, строят окружности с центрами на отрицательной вещественной полуоси, касающиеся одновременно луча АФХ разомкнутой системы при различных значениях Т и. Измеряют в соответствующем масштабе радиусы полученных окружностей t и рассчитывают: K рег = [М / ( M2-1)] * (1/t) = 1,88/t.
Таблица № 3.
Значения DА для построения АФХ разомкнутой системы.
| Частота w, рад/c | DA для Т и = 0,3 c | DA для Т и = 0,5 c | DA для Т и = 0,7 c | DA для Т и = 0,9 c |
| 0,7500 | 2,5240 | 1,5144 | 1,0817 | 0,8413 |
| 0,9000 | 2,0489 | 1,2294 | 0,8781 | 0,6830 |
| 1,0500 | 1,6973 | 1,0184 | 0,7274 | 0,5658 |
| 1,2000 | 1,4204 | 0,8523 | 0,6088 | 0,4735 |
| 1,3500 | 1,1915 | 0,7149 | 0,5107 | 0,3972 |
М 1 1,88
![]()
![]()
![]() K рег = *
= ;
K рег = *
= ;
М2 - 1 r r
Измеренные в соответствующем масштабе радиусы полученных окружностей r и K рег записываем в табл. 4.
Таблица № 4. Расчетные данные.
| Т и, с | 0,3000 | 0,5000 | 0,7000 | 0,9000 |
| r ,oC / % хода | 4,9200 | 2,9100 | 2,3000 | 1,9500 |
| К рег, % хода / oC | 0,3421 | 0,6060 | 0,8174 | 0,9641 |
.
Графический расчет приведен на рис.2.
На плоскости настроек регулятора строим зависимость К рег от Т и (рис.5.) и находят точку с наибольшим отношением К рег / T и (точка касания прямой, выходящей из начала координат). Настройки соответствующие, этой точке K рег. oпт. = 0,65 % хода // oC и Т и. oпт. =0,55 c, обеспечивают минимальное значение квадратичного интегрального критерия качества при М = = 1,3. Зависимость К рег от Т приведена на рис.3.
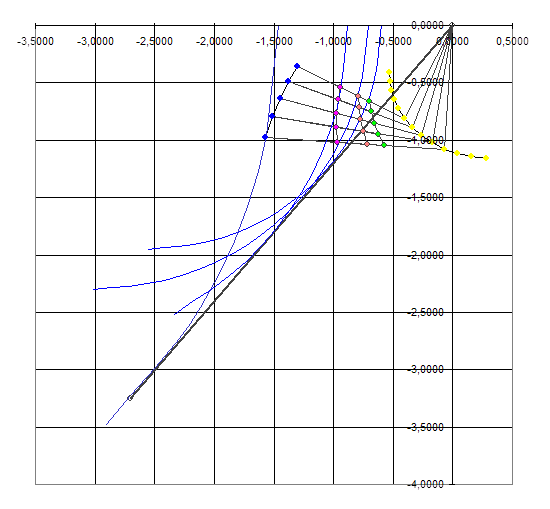
(рис.2)
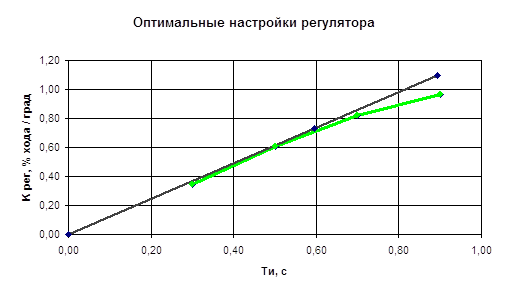
(рис.3)
Выводы.
При рассмотрении существующих способов и систем регулирования соотношения топливо – воздух было установлено, что для высокоэффективного регулирования необходим учет и по возможности стабилизация параметров топлива и воздуха при подводе их к зонам горения. Для снижения количества вредных выбросов и повышения экономичности сжигания топлива необходима синхронизация срабатывания регулирующих органов на газо – и воздухопроводах, а в некоторых случаях и задаваемое опережение в срабатывании одного из них. Так же установлено, что регулирование соотношения только по сигналу обратной связи, например по содержанию кислорода или смеси углерода в продуктах сгорания, не может обеспечить высокую эффективность сжигания топлива переменного состава даже при наличии достаточно точного и малоинерционного датчика кислородного потенциала. Предложенная система управления сжиганием топлива в значительной мере свободна от недостатков, присущим рассмотренным существующим системам, совмещающая в себе принцип компенсации входных возмущений в момент их появления, исключение внесения дополнительных возмущений в процессе регулирования и точное поддержание заданного состояния за счет использования сигнала обратной связи, характеризующего результат управления.
На основании проведенной работы был осуществлен синтез системы управления сжиганием топлива с учетом его состава и кислородного потенциала печной атмосферы. Приведенное в работе построение системы позволяет резко снизить погрешность реализации управляющих воздействий и повысить надежность всей системы. Работа самостоятельных подсистем : регулирования температуры в зоне и давления в печи, учета параметров топлива и воздуха, выбора соответствующего условиям работы печи коэффициента расхода воздуха, расчета стехиометрического соотношения и необходимого расхода воздуха, управление расходом воздуха, измерения кислородного потенциала и формирования корректирующих импульсов взаимно синхронизирована управляющей программой, что обеспечивает высокую эффективность сжигания топлива при одновременном уменьшении количества вредных выбросов.
Справочная литература.
1. Ницкевич Е. А., Шор В. И. - Бюл. ин-та «Черметинформация», «Черная металлургия», 1985, №6, с.3-20.
2. Сегаль А. М., Буглак Л. И., Франценюк И. В. и др. - Сталь, 1977, №9, с.852-853.
3. Тихомиров А. И., Шистеров В. Н., Заряницкий Ю. А. - Металлург, 1982, №1, с.34-36.
4. Масалович В. Г. Экономия топлива в металлургических печах. М: Металлургия, 1981, с.45-51.
5. Буглак Л. И., Климовицкий М. Д., Белянский А. Д. и др. - Сталь, 1987, №6, с.96-99.
6. Стеркач И. Е. - В кн. «Совершенствование проектов доменных, сталеплавильных цехов и отделений непрерывной разливки стали», М: Металлургия, 1985, с.48-57.
7. Линчевский В. И. Топливо и его сжигание. М: Металлургиздат, 1959, с.400.
8. Шульц Л. А., Богоявленский М. С., Лебедев Н. Н. - В кн. Повышение технико-экономических показателей металлургических печей. М: Металлургия, 1986, с.78-83.
9. Преображенский В. П. Теплотехнические измерения и приборы. М: Энергия, 1978, с.704.
10. Земельман М. А. Автоматическая коррекция погрешности измерительных устройств. М: Издательство стандартов, 1972, с.199.
11. Гуськов Б. И., Кряжев Б. Г. Газификации промышленных предприятий, М: Стройиздат, 1982, с.386.
Содержание.
1.Введение…………………………………………………………….2
2.ГСС как объект автоматизации……………………………………3
3.Выбор локальных систем регулирования………………………...6
4.Разработка АСУ ТП………………………………………………..13
5.Математическое описание объекта………………………………..16
6.Расчет локальной системы регулирования……………………….19
7.Выводы……………………………………………………………...25
8.Справочная литература……………………………………………..26
Похожие работы
... тепловой нагрузки. Для перехода на дистанционное управление служит блок 14 (БРУ-У), соединенный через пускатель 75 (ПРБ-74) с двигателем 16 (МЭО 25/100), перемещающим P.O. III. Теплота сгорания топлива контролируется датчиком 17 (КГ-7093.01), корректирующий импульс формируется во вторичном приборе 18 (КГ-7093.02). Коррекция задания при изменении тепловой нагрузки осуществляется с помощью блока ...
... » анализ платежеспособности показал, что предприятие на 01.10.97 является неплатежеспособным, но прогноз платежеспособности положительный. 4. Маркетинговые исследования предприятия и разработка системы управления продвижения изделий фирмы на рынок 4.1. Маркетинговые исследования предприятия ОАО «Волжское Химволокно» производит полиамидные (капроновые) нити текстильного и технического назначения, ...
... ? 25. В чем сущность биохимических, фотохимических, радиационно-химических, плазмохимических процессов? Указать области их применения. 26. Какие основные группы физических процессов используют в системах технологий? 27. Дать определение машиностроению как комплексной области. Какова структура машиностроительного предприятия? 28. Раскрыть сущность понятий «изделие», «деталь», «сборочная единица ...
... или технологических процессов; – при выборе технического решения обеспечить малоотходность производства и максимальную эффективность использования энергоресурсов. Задачи специалиста в области безопасности жизнедеятельности сводятся к следующему; – контроль и поддержание допустимых условий (параметры микроклимата, освещение и др.) жизнедеятельности человека в техносфере; – идентификация ...
0 комментариев